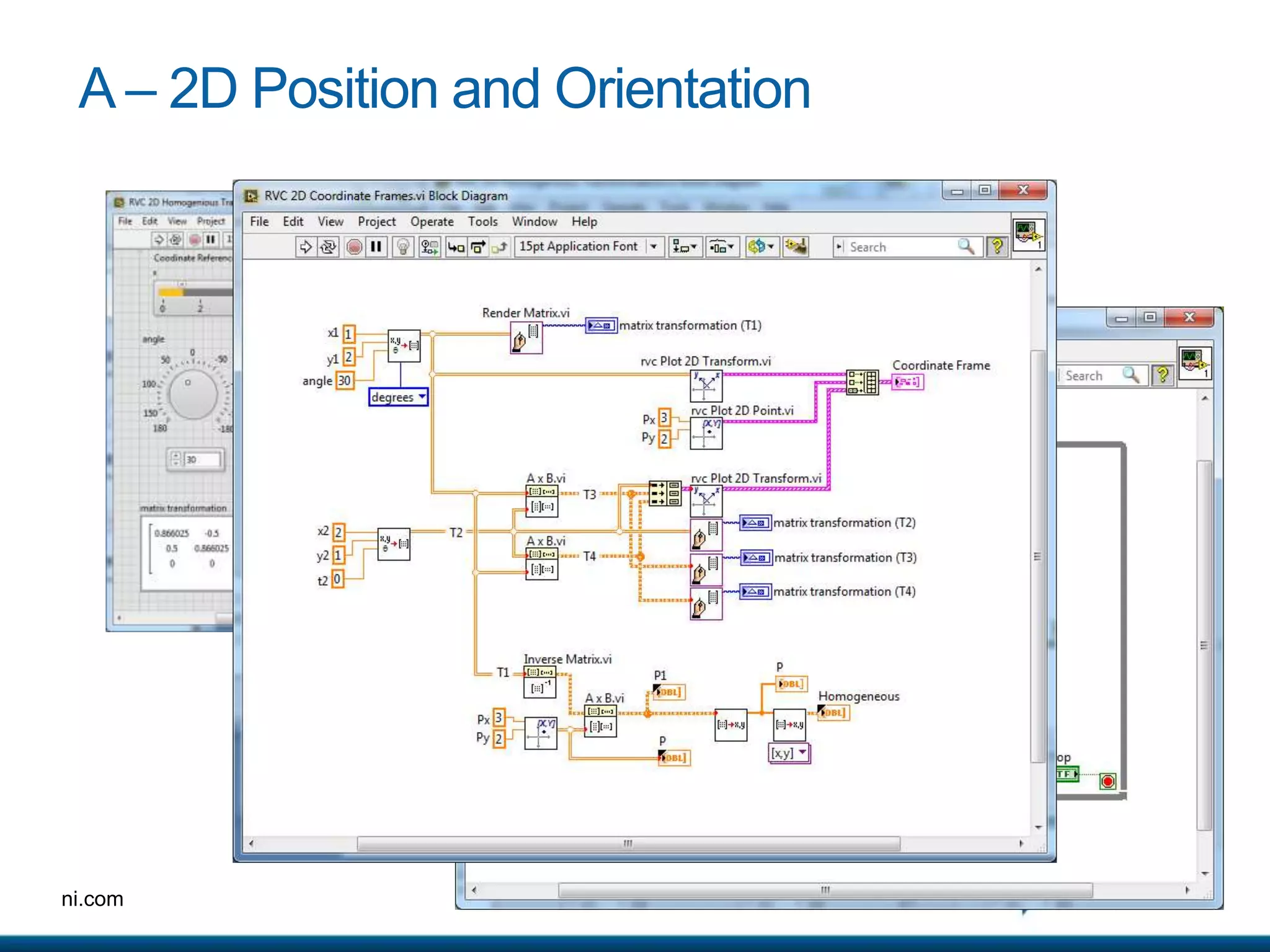
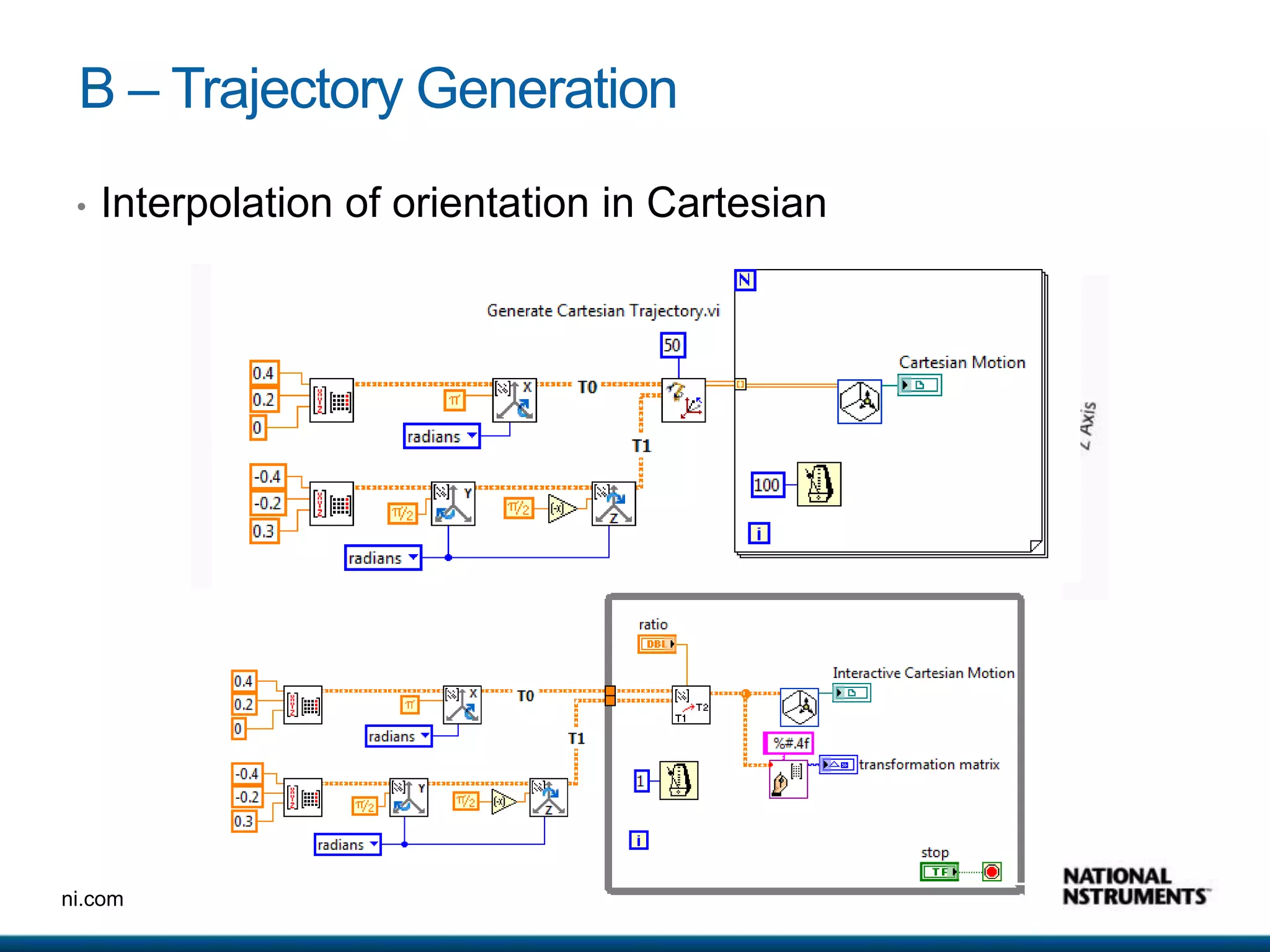
The document discusses navigation and control for robotics using LabVIEW. It covers topics like position and orientation in 2D and 3D, trajectory generation, vehicle control models, robotic navigation approaches including reactive and map-based planning, localization, and provides LabVIEW examples. Navigation algorithms like Bug2, Dijkstra's, A*, and D* are explained in terms of complexity, advantages, and disadvantages.