NASA Self-Adaptation of Loosely Coupled Systems across a System of Small Uncrewed Aerial Vehicles
•
1 like•3 views

NASA National Aeronautics and Space Administration NASA Self-Adaptation of Loosely Coupled Systems across a System of Small Uncrewed Aerial Vehicles By Dr. Pankaj Dhussa
Recommended

Recommended
More Related Content
Similar to NASA Self-Adaptation of Loosely Coupled Systems across a System of Small Uncrewed Aerial Vehicles
Similar to NASA Self-Adaptation of Loosely Coupled Systems across a System of Small Uncrewed Aerial Vehicles (20)
More from Dr. Pankaj Dhussa
More from Dr. Pankaj Dhussa (20)
Recently uploaded
Recently uploaded (20)
NASA Self-Adaptation of Loosely Coupled Systems across a System of Small Uncrewed Aerial Vehicles
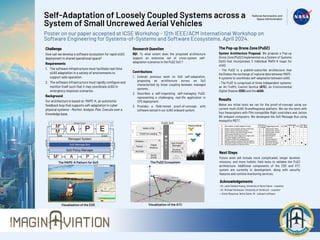
- 1. Self-Adaptation of Loosely Coupled Systems across a System of Small Uncrewed Aerial Vehicles Poster on our paper accepted at ICSE Workshop - 12th IEEE/ACM International Workshop on Software Engineering for Systems-of-Systems and Software Ecosystems, April 2024. Challenge How can we develop a software ecosystem for rapid sUAS deployment in shared operational space? Requirements 1. The software infrastructure must facilitate real-time sUAS adaptation in a variety of environments to support safe operation. 2. The software infrastructure must rapidly configure and monitor itself such that it may coordinate sUAS in emergency response scenarios. Background Our architecture is based on MAPE-K, an autonomic feedback loop that supports self-adaptation in cyber physical systems – Monitor, Analyze, Plan, Execute over a Knowledge base. The MAPE-K Pattern for SoS Research Question RQ1. To what extent does the proposed architecture support an extensive set of cross-system self- adaptation scenarios in the PuDZ SoS ? Contributions 1. Extends previous work on SoS self-adaptation, proposing an architecture across an SoS characterized by loose coupling between managed systems. 2. Describes a self-organizing, self-managing PuDZ, representing a challenging, real-life application in CPS deployment. 3. Provides a field-tested proof-of-concept, with software tested in our sUAS onboard system. Acknowledgements • Dr. Jane Cleland-Huang, University of Notre Dame – coauthor • Dr. Michael Vierhauser, University of Innsbruck – coauthor • Drone Response, Notre Dame, IN – onboard software Results Below are initial tests we ran for the proof-of-concept using our current multi-SUAS DroneResponse platform. We ran the tests with four Hexacopters with PX4-compatible flight controllers and Jetson NX onboard computers. We developed the SoS Message Bus using mosquitto MQTT. Visualization of the EDS Next Steps The Pop-up Drone Zone (PuDZ) System Architecture Proposal. We propose a Pop-up Drone Zone (PuDZ) implemented as a System of Systems (SoS) that incorporates 3 individual MAPE-K loops for sUAS. - The PuDZ is a publish-subscribe architecture that facilitates the exchange of regional data between MAPE- K systems to coordinate self-adaptation between sUAS. - The PuDZ is comprised of three independent systems: an Air-Traffic Control Service (ATC), an Environmental Digital Shadow (EDS) and the sUAS. Managed System A P local regional M regional local M SoS Message Bus SoS Policy Manager 1 * 1 * 1 1 R L A P E MR MR 1 1 E Managing System SoS SoS Policy Manager M Q T T Runtime Monitoring PuDZ Air Leasing Weather Terrain NOTAM No-fly Zones Digital Shadow NASA UTM ATC Other Systems sUAS Physical World PuDZ SoS EDS PuDZ Services The PuDZ Ecosystem Visualization of the ATC Future work will include more complicated, longer duration missions, and more holistic field tests to validate the PuDZ architecture. Additional components of the EDS and ATC system are currently in development, along with security features and runtime monitoring services.