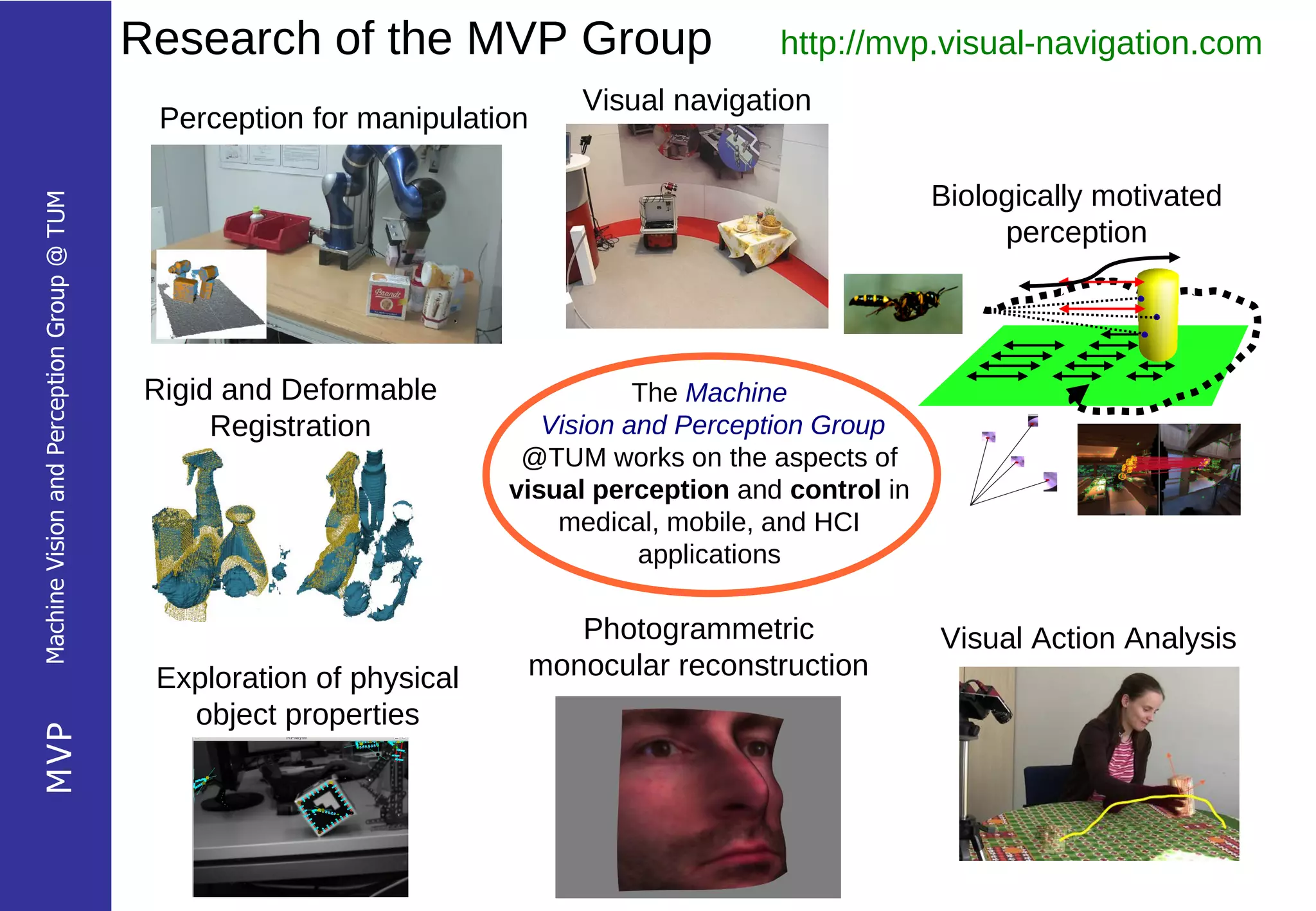
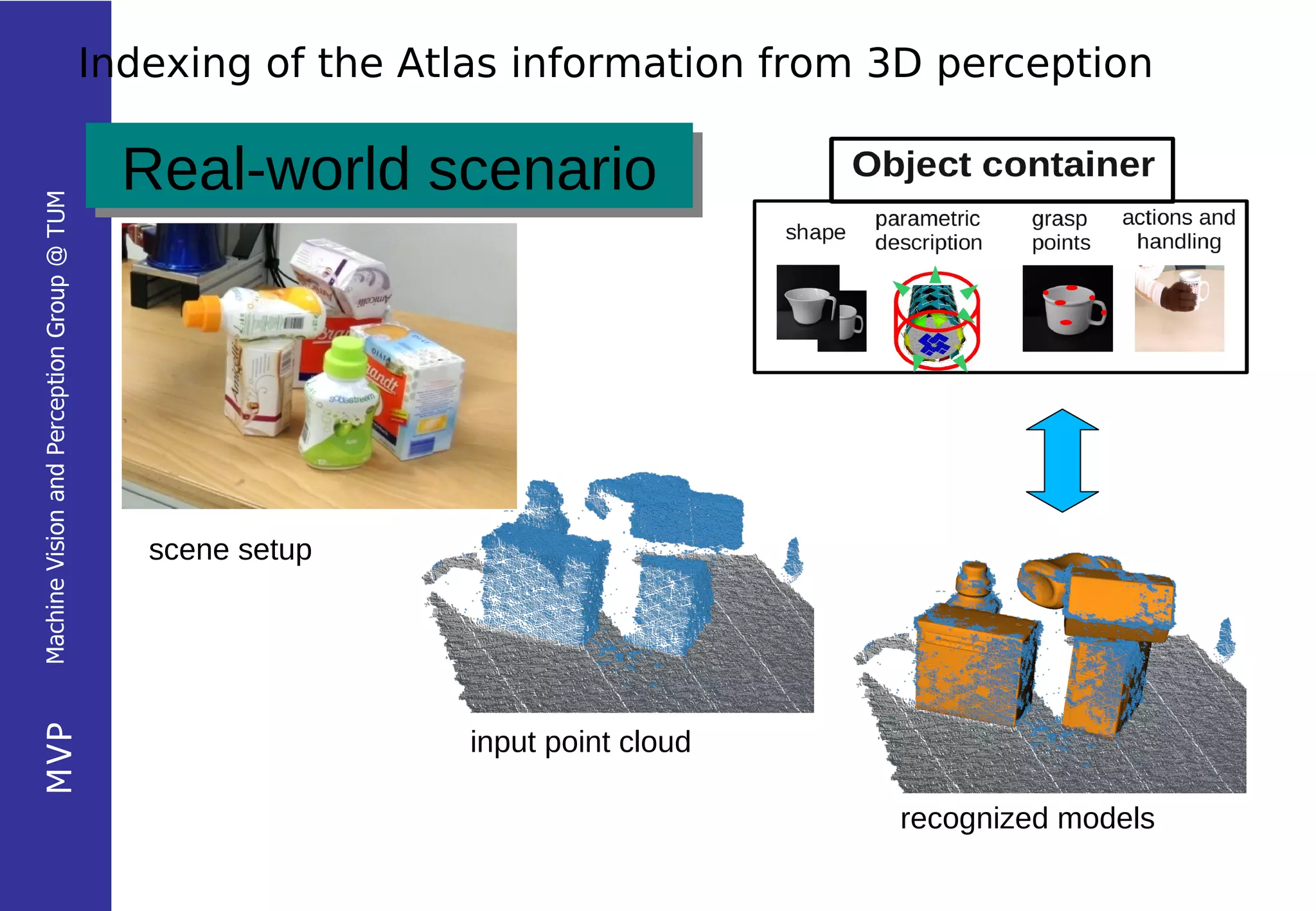
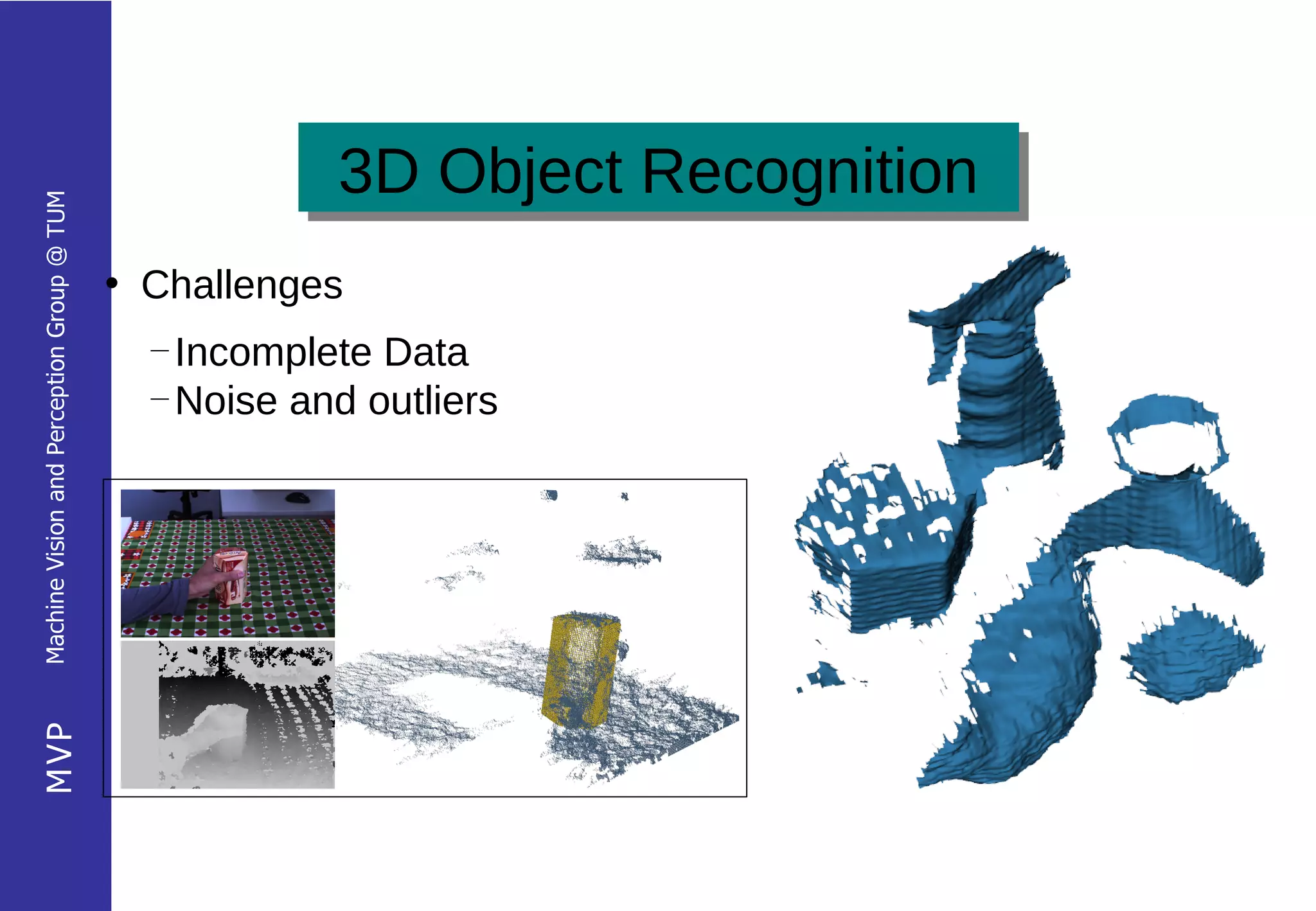
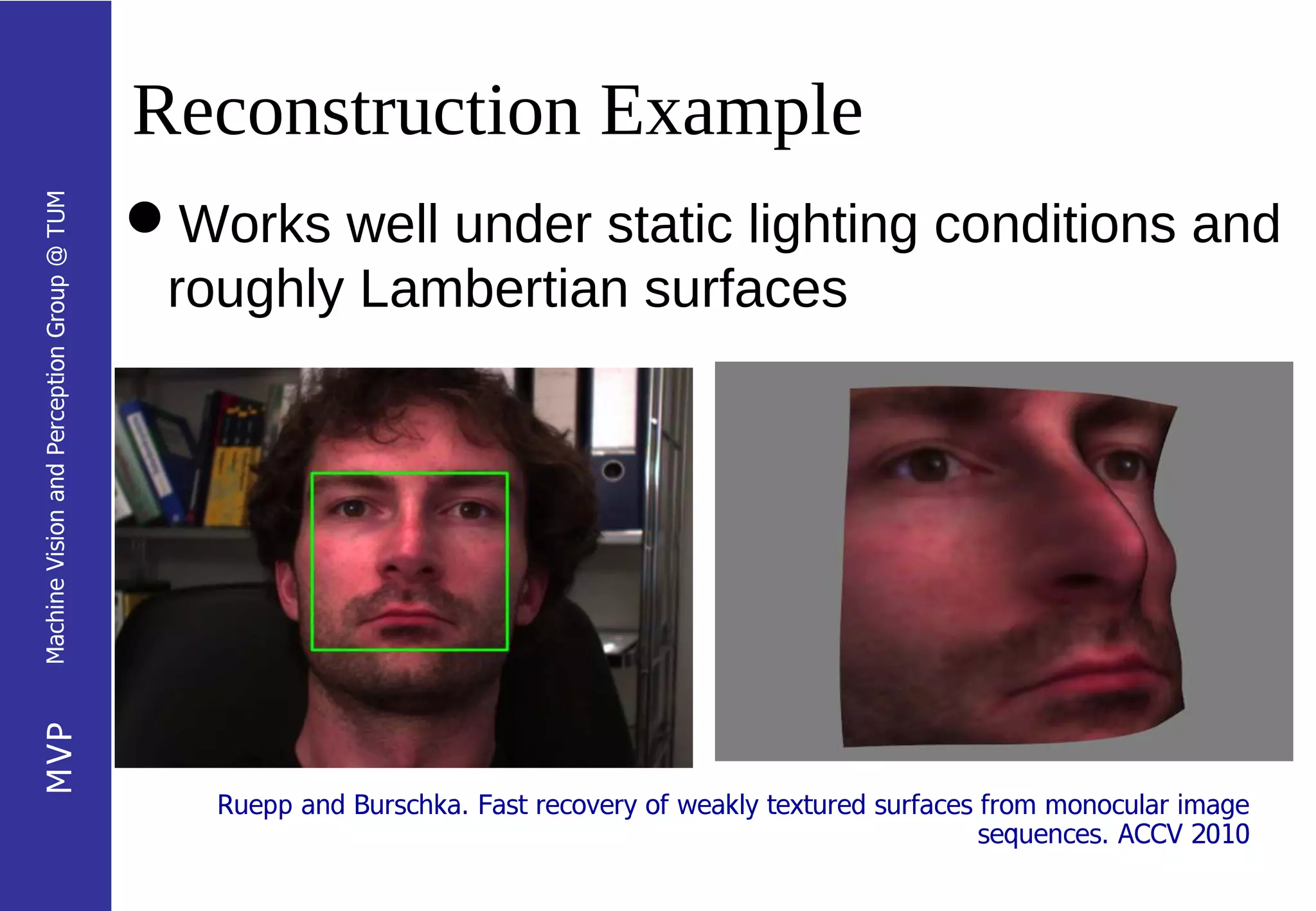
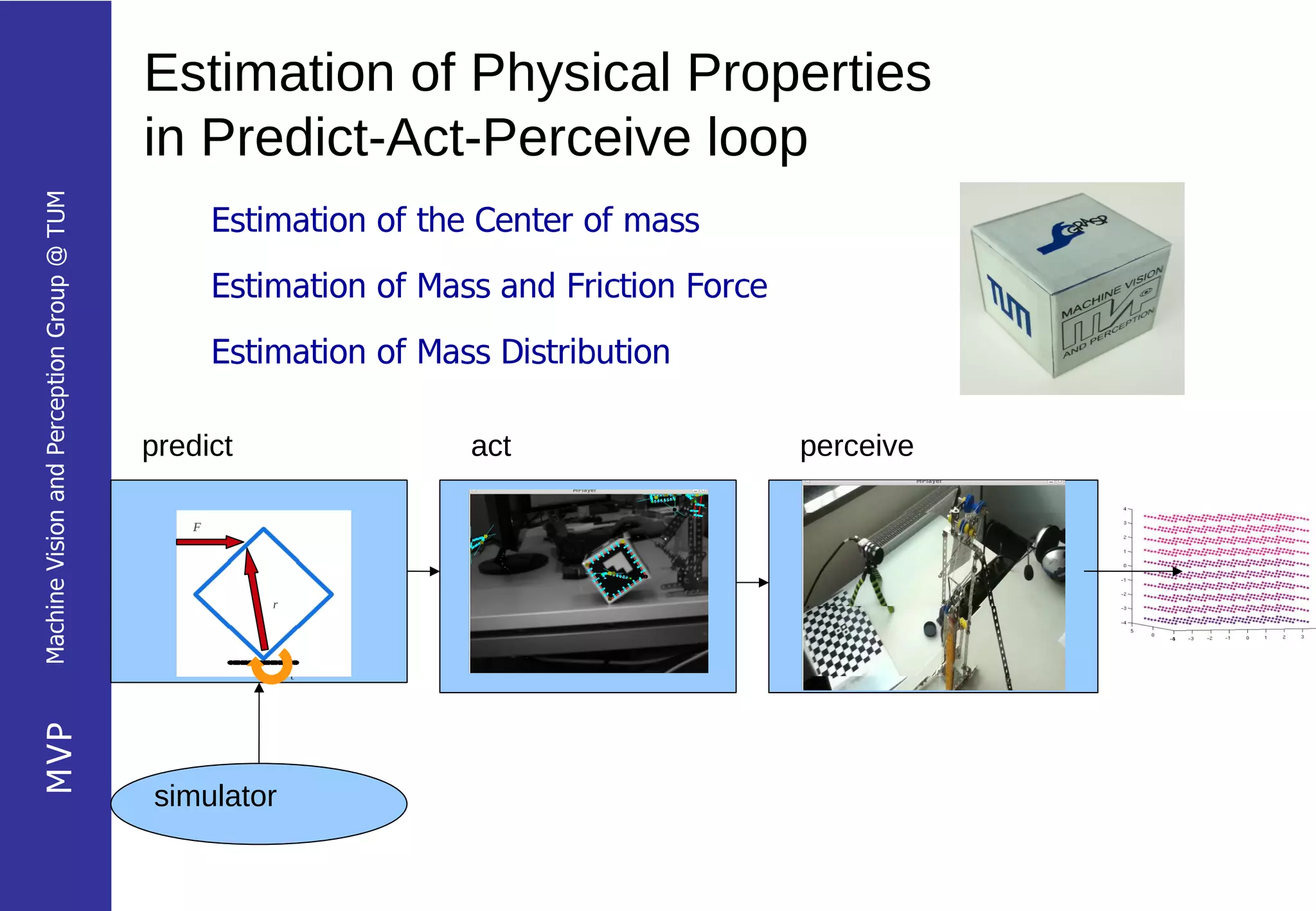
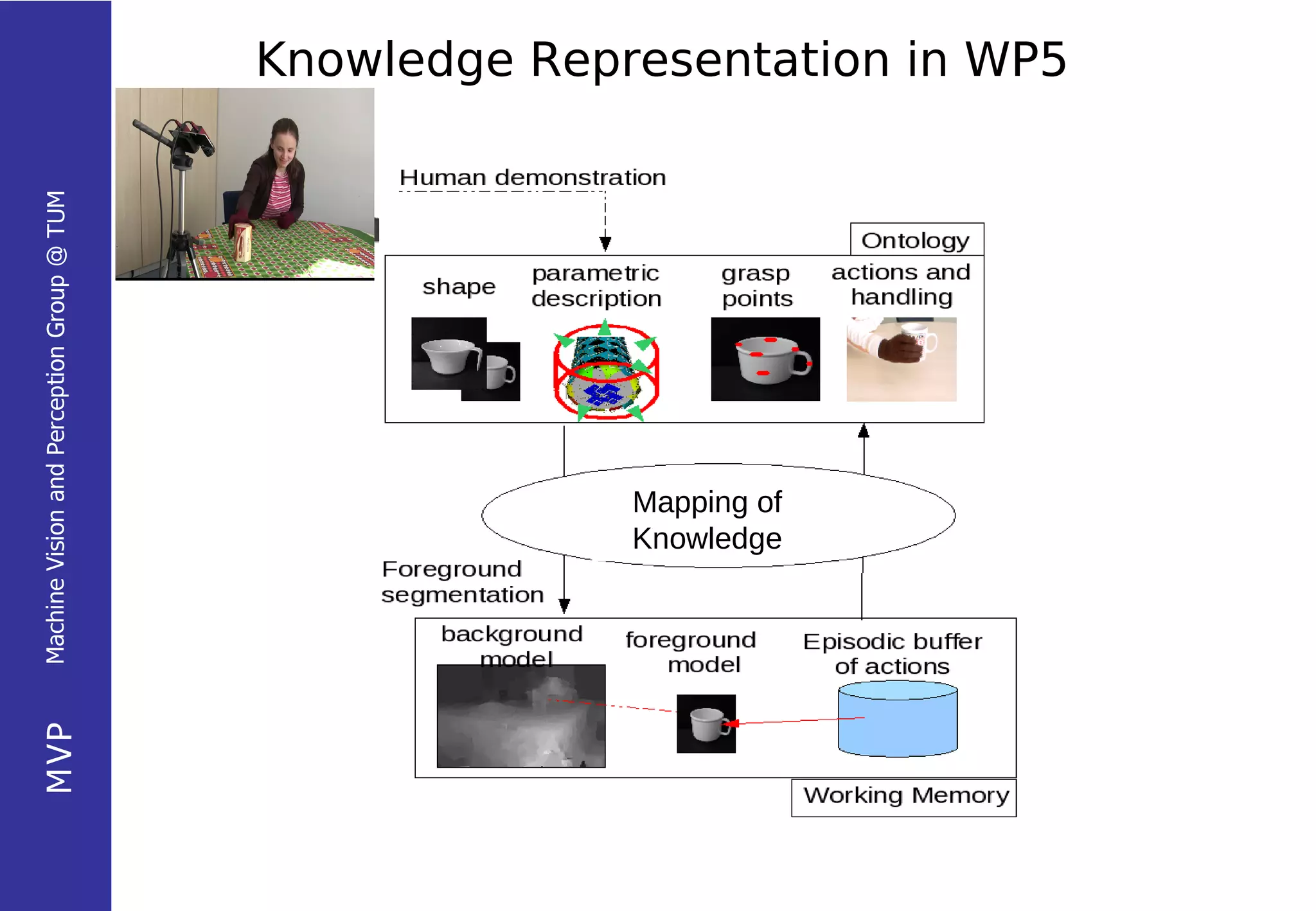
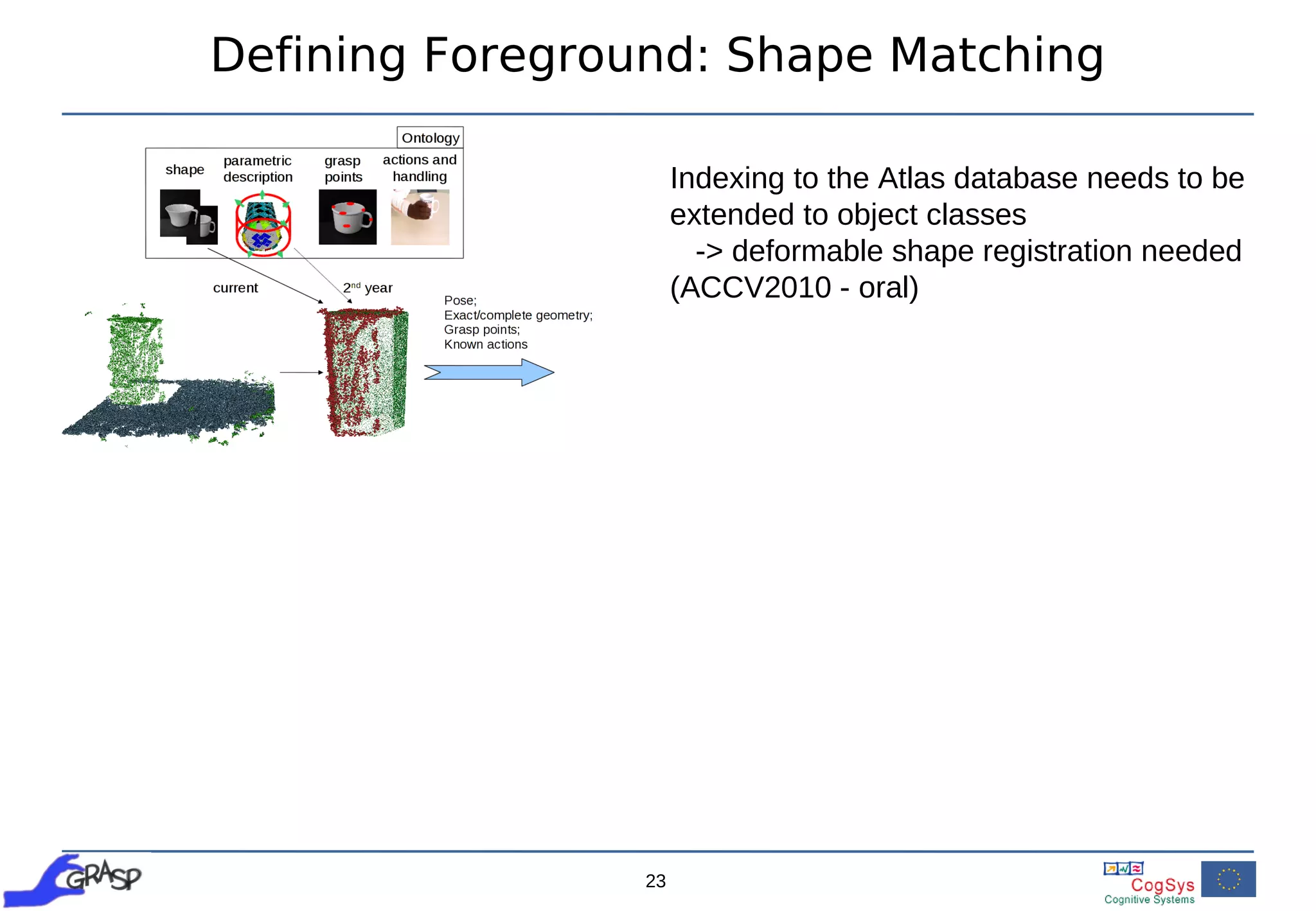
The Machine Vision and Perception Group at the Technical University of Munich conducts research on visual perception and its application to medical, mobile, and human-computer interaction systems. This includes areas like registration of rigid and deformable objects, monocular reconstruction, visual localization and mapping, and biologically inspired navigation and action analysis. The group develops algorithms for tasks like 3D object recognition in point clouds that are robust to incomplete and noisy data.

































![2008 brokerage 04 smart vision system [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/2008brokerage04-smartvisionsystemcompatibilitymode-100413034051-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![2008 brokerage 04 smart vision system [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/2008brokerage04-smartvisionsystemcompatibilitymode-100413033730-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)