Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
大工大エンジュニア
917 views
MR1を支えたEthernet&Rosシステム
大工大技術交流会で発表されたスライドです。
Engineering
◦
Read more
2
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 16
2
/ 16
3
/ 16
4
/ 16
5
/ 16
6
/ 16
7
/ 16
8
/ 16
9
/ 16
10
/ 16
11
/ 16
Most read
12
/ 16
13
/ 16
14
/ 16
Most read
15
/ 16
16
/ 16
Most read
More Related Content
PDF
学ロボの制御
by
Kotaro Yoshimoto
PDF
オープンソース SLAM の分類
by
Yoshitaka HARA
PDF
SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入)
by
SSII
PDF
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
PDF
大域マッチングコスト最小化とLiDAR-IMUタイトカップリングに基づく三次元地図生成
by
MobileRoboticsResear
PDF
論文紹介 Semantic Mapping for Mobile Robotics Tasks: A Survey
by
Akira Taniguchi
PPTX
3次元SLAMは誰でもできるよ。そう、TX2とTurtleBot3ならね。
by
ROBOTIS Japan
PPTX
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
学ロボの制御
by
Kotaro Yoshimoto
オープンソース SLAM の分類
by
Yoshitaka HARA
SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入)
by
SSII
SSII2019企画: 画像および LiDAR を用いた自動走行に関する動向
by
SSII
大域マッチングコスト最小化とLiDAR-IMUタイトカップリングに基づく三次元地図生成
by
MobileRoboticsResear
論文紹介 Semantic Mapping for Mobile Robotics Tasks: A Survey
by
Akira Taniguchi
3次元SLAMは誰でもできるよ。そう、TX2とTurtleBot3ならね。
by
ROBOTIS Japan
SLAM勉強会(3) LSD-SLAM
by
Iwami Kazuya
What's hot
PDF
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
PDF
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
PDF
【メタサーベイ】基盤モデル / Foundation Models
by
cvpaper. challenge
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
PDF
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
PDF
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
PDF
LiDARとSensor Fusion
by
Satoshi Tanaka
PDF
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
PDF
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
PDF
四脚ロボットによる つくばチャレンジへの取り組み
by
kiyoshiiriemon
PDF
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
PPTX
【DL輪読会】マルチモーダル 基盤モデル
by
Deep Learning JP
PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
PDF
自己教師学習(Self-Supervised Learning)
by
cvpaper. challenge
PDF
三次元表現まとめ(深層学習を中心に)
by
Tomohiro Motoda
PDF
ORB-SLAMを動かしてみた
by
Takuya Minagawa
PDF
【CVPR 2020 メタサーベイ】3D From a Single Image and Shape-From-X
by
cvpaper. challenge
PPTX
[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...
by
Deep Learning JP
PPTX
[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection
by
Deep Learning JP
PDF
SSII2021 [OS3-01] 設備や環境の高品質計測点群取得と自動モデル化技術
by
SSII
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
ROS を用いた自律移動ロボットのシステム構築
by
Yoshitaka HARA
【メタサーベイ】基盤モデル / Foundation Models
by
cvpaper. challenge
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
ロボティクスにおける SLAM 手法と実用化例
by
Yoshitaka HARA
ROS の活用による屋外の歩行者空間に適応した自律移動ロボットの開発
by
Yoshitaka HARA
LiDARとSensor Fusion
by
Satoshi Tanaka
Cartographer を用いた 3D SLAM
by
Yoshitaka HARA
SSII2019TS: 実践カメラキャリブレーション ~カメラを用いた実世界計測の基礎と応用~
by
SSII
四脚ロボットによる つくばチャレンジへの取り組み
by
kiyoshiiriemon
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
【DL輪読会】マルチモーダル 基盤モデル
by
Deep Learning JP
SSII2018TS: 3D物体検出とロボットビジョンへの応用
by
SSII
自己教師学習(Self-Supervised Learning)
by
cvpaper. challenge
三次元表現まとめ(深層学習を中心に)
by
Tomohiro Motoda
ORB-SLAMを動かしてみた
by
Takuya Minagawa
【CVPR 2020 メタサーベイ】3D From a Single Image and Shape-From-X
by
cvpaper. challenge
[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...
by
Deep Learning JP
[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection
by
Deep Learning JP
SSII2021 [OS3-01] 設備や環境の高品質計測点群取得と自動モデル化技術
by
SSII
MR1を支えたEthernet&Rosシステム
1.
MR1を支えた Ethernet&ROS システム 大工大技術交流会2019 京都大学機械研究会
2.
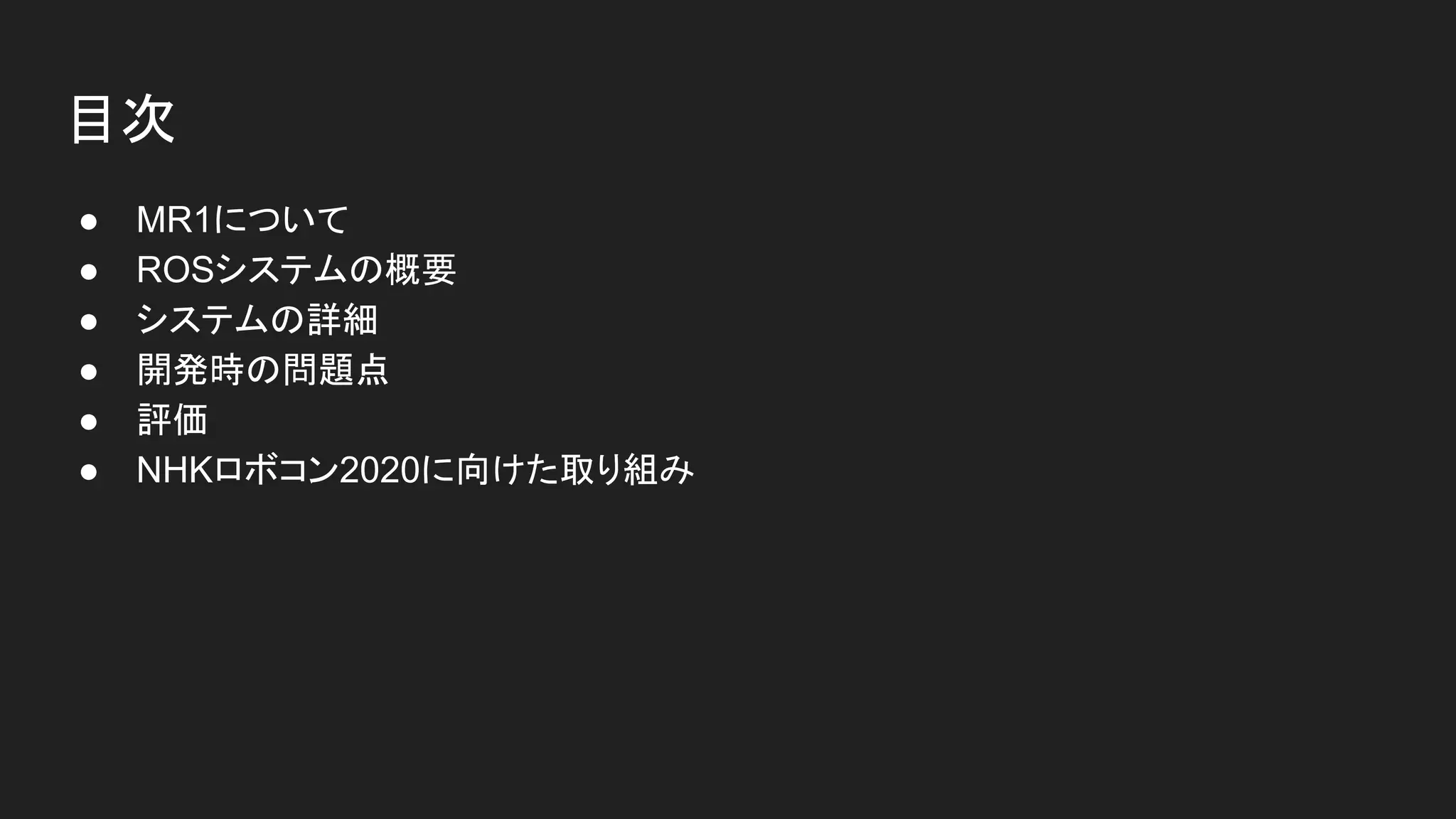
目次 ● MR1について ● ROSシステムの概要 ●
システムの詳細 ● 開発時の問題点 ● 評価 ● NHKロボコン2020に向けた取り組み
3.
MR1について ● 15年ぶりの出場のため、MD,制御を始めとする 全技術を9ヶ月で開発 ● 制御の主軸は
転がしエンコーダー と IMU を用 いた制御 ● LiDARとROSを用いた自己位置推定システム は絶対位置を補正するための補助
4.
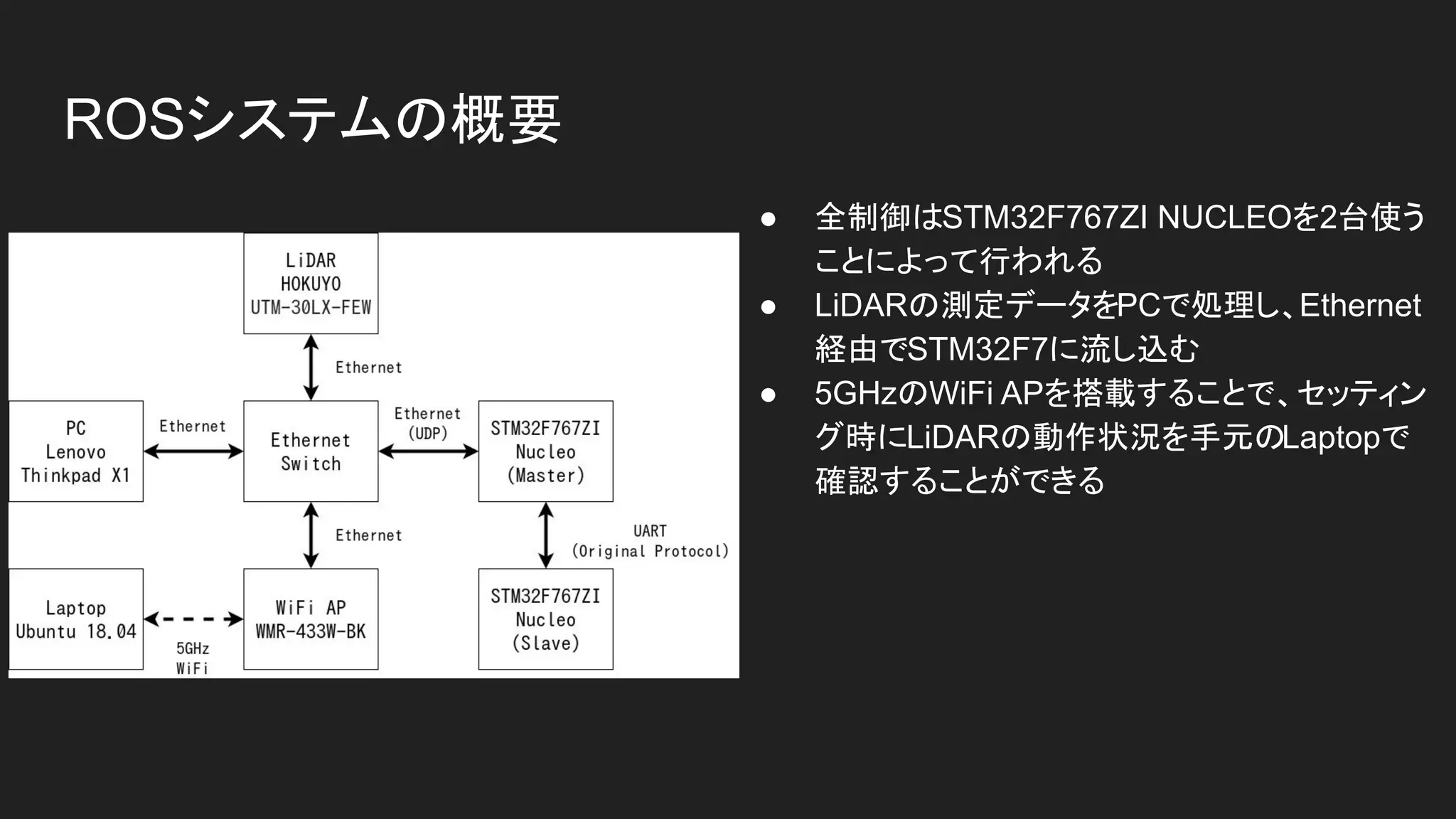
ROSシステムの概要 ● 全制御はSTM32F767ZI NUCLEOを2台使う ことによって行われる ●
LiDARの測定データをPCで処理し、Ethernet 経由でSTM32F7に流し込む ● 5GHzのWiFi APを搭載することで、セッティン グ時にLiDARの動作状況を手元のLaptopで 確認することができる
5.
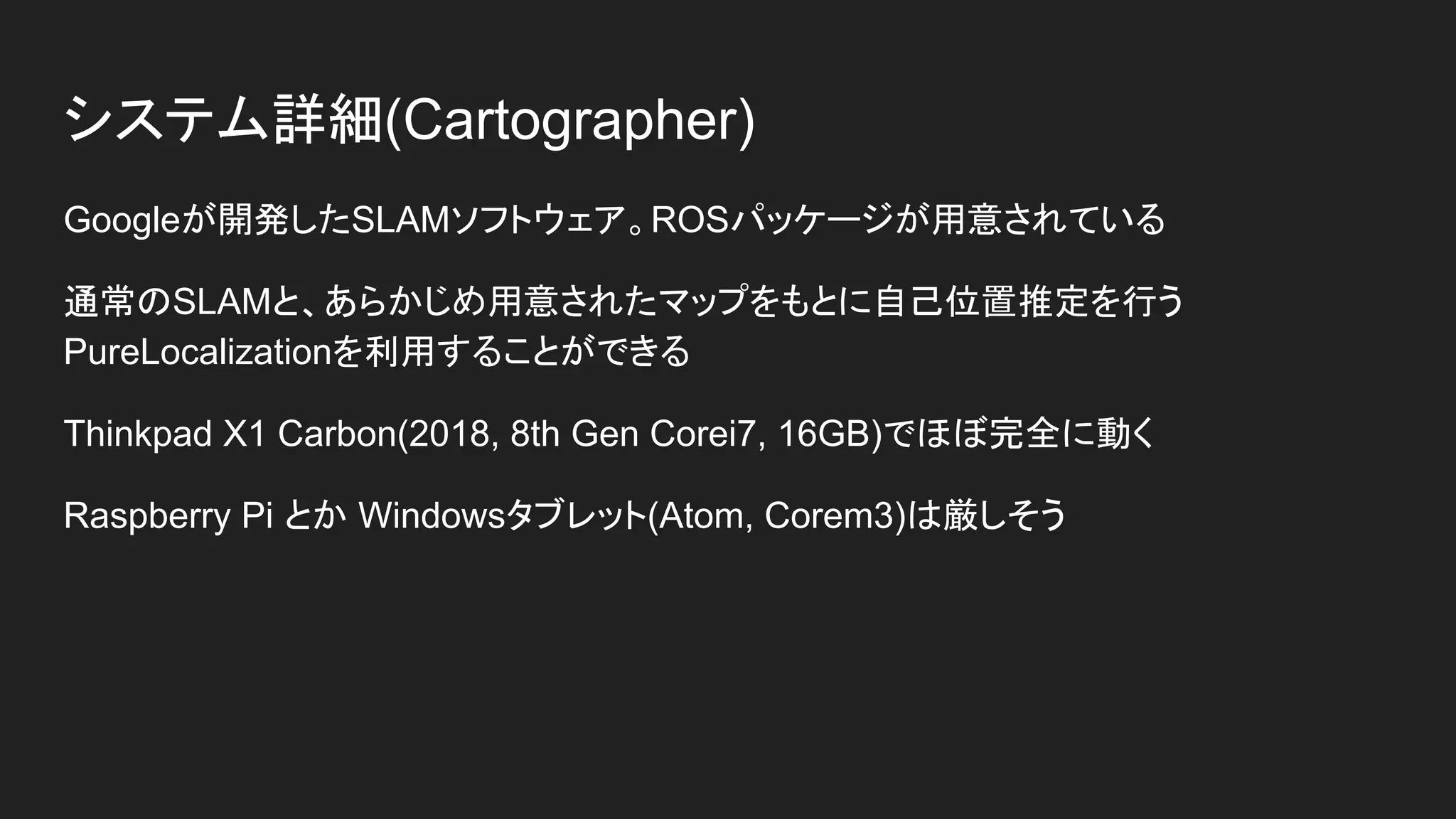
システム詳細(Cartographer) Googleが開発したSLAMソフトウェア。ROSパッケージが用意されている 通常のSLAMと、あらかじめ用意されたマップをもとに自己位置推定を行う PureLocalizationを利用することができる Thinkpad X1 Carbon(2018,
8th Gen Corei7, 16GB)でほぼ完全に動く Raspberry Pi とか Windowsタブレット(Atom, Corem3)は厳しそう
7.
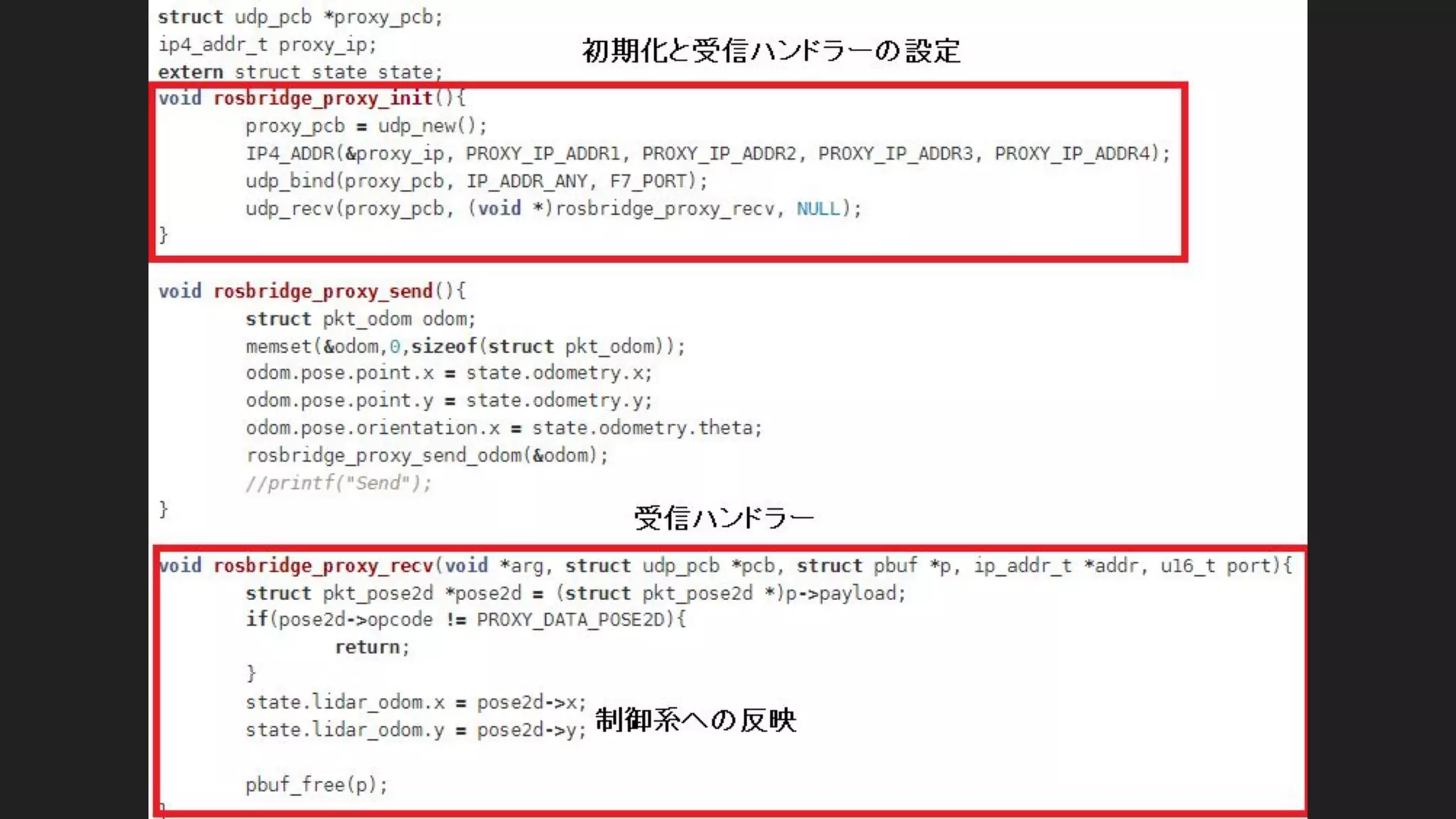
システム詳細(ROS) ● 北陽LiDARからのデータをGoogleの自己位置推定エンジンCartographerによって処理し、 carto2poseによって座標データに変換、自己位置を得る ● 得られた自己位置情報はrosbridgeとrosbridge-proxyによって独自フォーマットのデータに変 換され、STM32F7にUDPパケットとして送られる ●
STM32F7は受け取った自己位置とエンコーダーによる自己位置を相補フィルタによって統合 し、制御に使う
8.
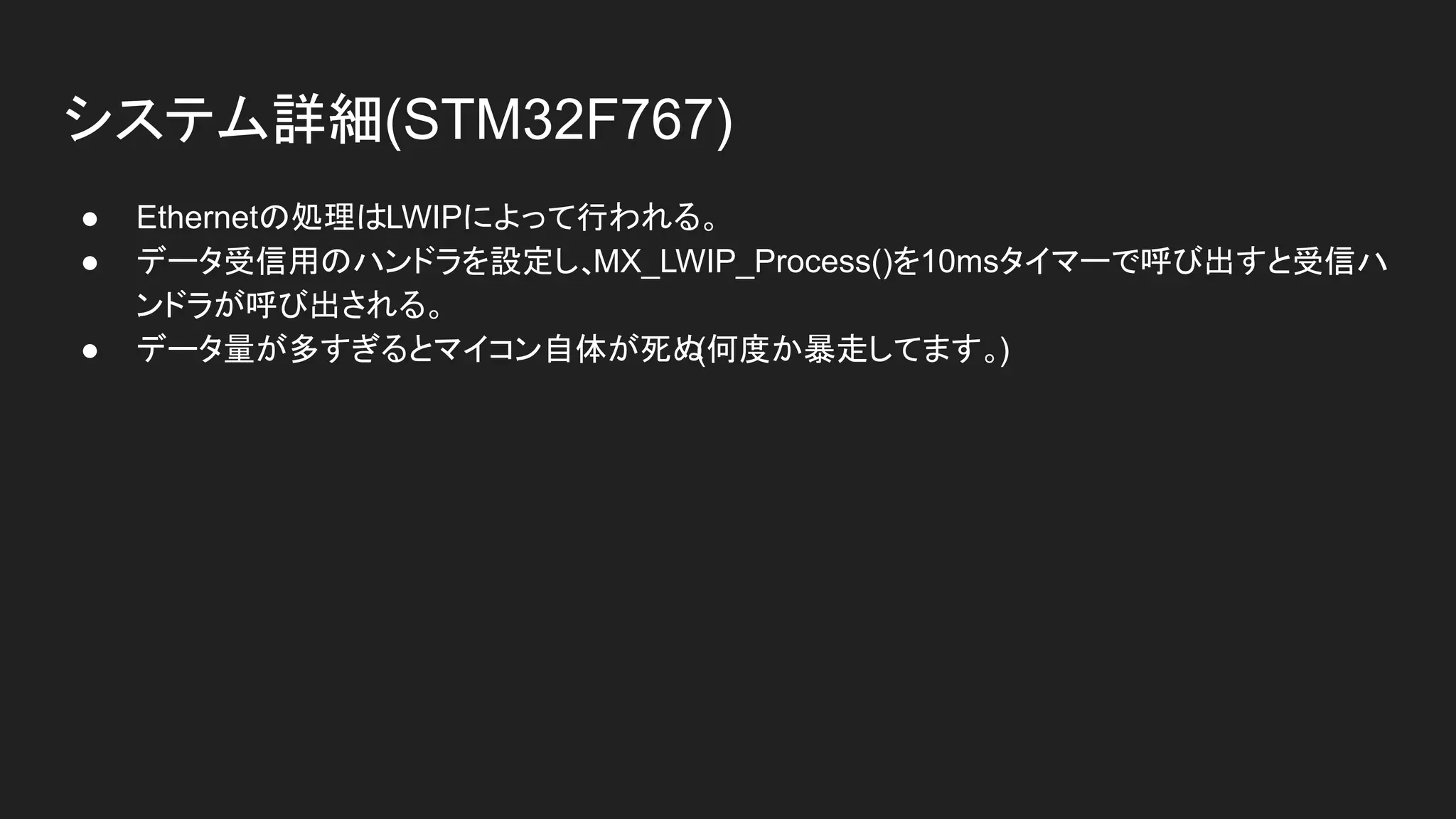
システム詳細(STM32F767) ● Ethernetの処理はLWIPによって行われる。 ● データ受信用のハンドラを設定し、MX_LWIP_Process()を10msタイマーで呼び出すと受信ハ ンドラが呼び出される。 ●
データ量が多すぎるとマイコン自体が死ぬ(何度か暴走してます。)
9.
ソースコード一部掲載(全体公開は間に合いませんでした)
13.
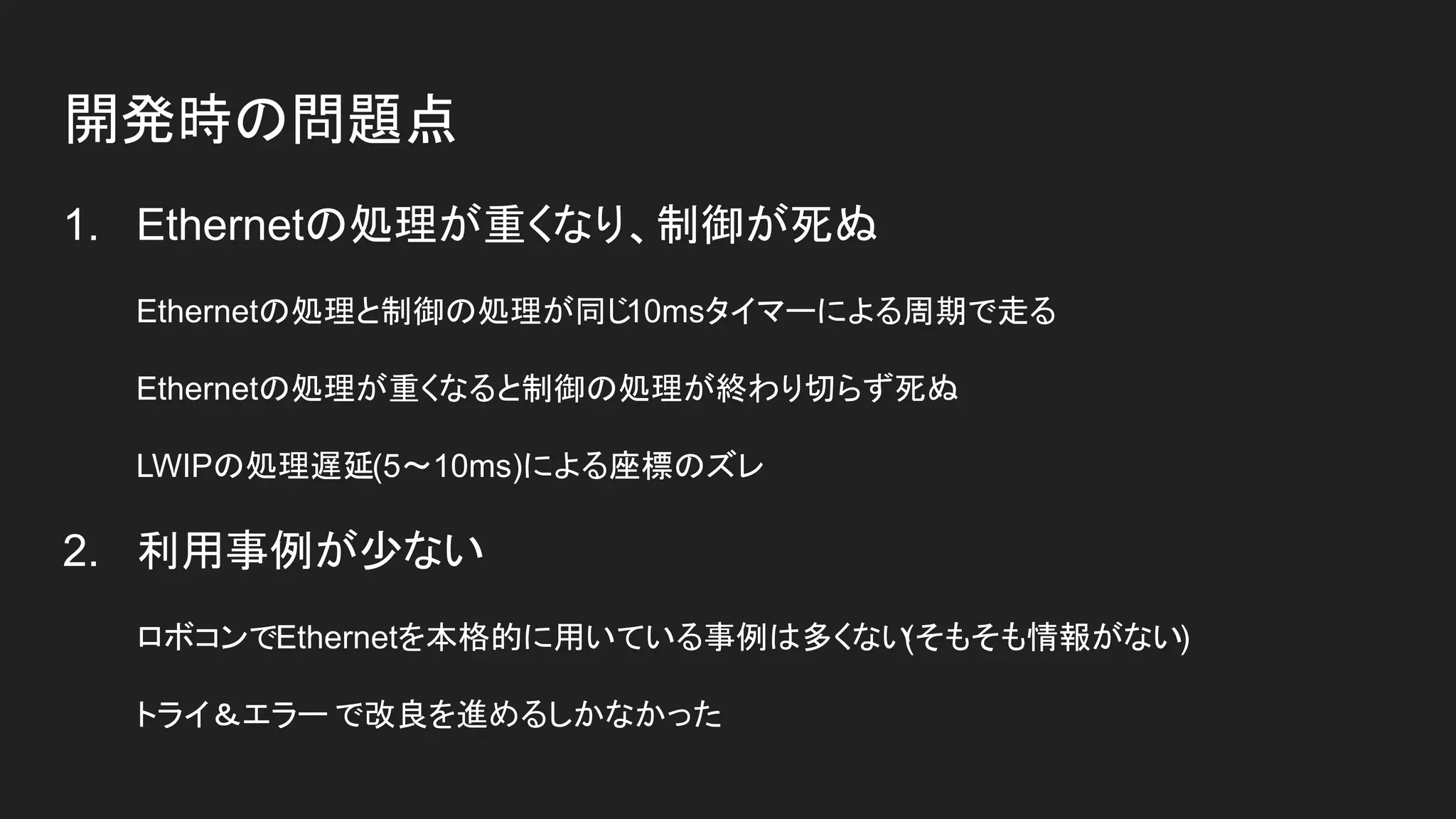
開発時の問題点 1. Ethernetの処理が重くなり、制御が死ぬ Ethernetの処理と制御の処理が同じ10msタイマーによる周期で走る Ethernetの処理が重くなると制御の処理が終わり切らず死ぬ LWIPの処理遅延(5〜10ms)による座標のズレ 2. 利用事例が少ない ロボコンでEthernetを本格的に用いている事例は多くない(そもそも情報がない) トライ&エラー
で改良を進めるしかなかった
14.
評価 ● LiDAR+Cartographer を用いることでcmオーダーの絶対位置を得ることができるため、自動 化においてかなりの威力を発揮した ●
ライントレースやカメラ等によるセンシングよりも外乱に強い ● ROSを用いることで、アルゴリズム開発をしなくて良い。開発負担の軽減 ● ROSによるロボットからのデータの可視化が容易(今回はあまり活用できていない) ● 楽しい(とても大事) ● LiDARの取り付けや角度調整が面倒 ● LiDAR系と転がしエンコーダー系の時間的なズレへの対処が必要 ● RTOSを用いていないため、Ethernetの処理が増加すると制御も崩壊する ● Linuxとマイコン両者を扱える人がほとんどいない(=技術継承の困難)
15.
NHKロボコン2020に向けた取り組み ● RTOSを用いることで、安定した動作を目指す ● UART上の独自プロトコルをEthernet上のUDP通信に置き換える(=Ethernetの本格採用) ●
ログを収集し、PC上で容易に確認可能にする ● 後継者の育成 ● ロボコン界隈へのROS,Ethernetという新たな選択肢の導入 ● EthernetケーブルにはEthernetフレームを流したい
16.
ソースコード一式 ● cartographer_ros cartographerのROSパッケージ https://gitlab.com/kikaiken/cartographer_ros ●
carto2pose cartographerのデータから座標データを取り出す https://gitlab.com/kikaiken/carto2pose ● rosbridge_proxy JSONから独自フォーマットへ変換する https://gitlab.com/kikaiken/rosbridge-proxy
Download











![SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入)](https://cdn.slidesharecdn.com/ss_thumbnails/os3-01-210605061816-thumbnail.jpg?width=640&height=640&fit=bounds)








![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)






![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...](https://cdn.slidesharecdn.com/ss_thumbnails/struct2depth0301-190304050917-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/200515dlseminar-200515082345-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2021 [OS3-01] 設備や環境の高品質計測点群取得と自動モデル化技術](https://cdn.slidesharecdn.com/ss_thumbnails/os3-02-210605062048-thumbnail.jpg?width=640&height=640&fit=bounds)