Recommended
PDF
ゲームアーキテクチャパターン (Aurora Serverless / DynamoDB)
PDF
PPTX
AWS S3への直接バックアップでコスト削減!データ保護のお悩みは『Druva Phoenix』で解決!
PDF
Db2 v11.5.4 高可用性構成 & HADR 構成パターンご紹介
PPTX
RLSを用いたマルチテナント実装 for Django
PDF
PDF
SaaS テナント毎のコストを把握するための「AWS Application Cost Profiler」のご紹介
PDF
PDF
速習!論理レプリケーション ~基礎から最新動向まで~(PostgreSQL Conference Japan 2022 発表資料)
PDF
Java 8-streams-collectors-patterns
PPTX
サポート エンジニアが Azure Networking をじっくりたっぷり語りつくす会
PDF
AWS初心者向けWebinar AWSとのネットワーク接続入門
PPTX
サンプルで学ぶCassandraアプリケーションの作り方
PDF
MySQL Workbench をモデリングツールとして使ってみた
PPTX
バックログとタスクをインポート・エクスポート Team Foundation Server と Excel・Project との連携
PDF
Docker란 무엇인가? : Docker 기본 사용법
PDF
そんなトランザクションマネージャで大丈夫か?
PDF
PPTX
PDF
Ingress on Azure Kubernetes Service
PDF
Zabbix最新情報 ~Zabbix 6.0に向けて~ @OSC2021 Online/Fall
PDF
20210127 今日から始めるイベントドリブンアーキテクチャ AWS Expert Online #13
PPTX
PDF
Application Spring MVC/IOC & Hibernate
PDF
ADO.NETとORMとMicro-ORM -dapper dot netを使ってみた
PDF
20210127 AWS Black Belt Online Seminar Amazon Redshift 運用管理
PDF
PostgreSQLレプリケーション10周年!徹底紹介!(PostgreSQL Conference Japan 2019講演資料)
PPTX
Azure databases for PostgreSQL, MySQL and MariaDB
PDF
JS開発におけるTDDと自動テストツール利用の勘所
PDF
JavaScript Unit Test Why? What? How?
More Related Content
PDF
ゲームアーキテクチャパターン (Aurora Serverless / DynamoDB)
PDF
PPTX
AWS S3への直接バックアップでコスト削減!データ保護のお悩みは『Druva Phoenix』で解決!
PDF
Db2 v11.5.4 高可用性構成 & HADR 構成パターンご紹介
PPTX
RLSを用いたマルチテナント実装 for Django
PDF
PDF
SaaS テナント毎のコストを把握するための「AWS Application Cost Profiler」のご紹介
PDF
What's hot
PDF
速習!論理レプリケーション ~基礎から最新動向まで~(PostgreSQL Conference Japan 2022 発表資料)
PDF
Java 8-streams-collectors-patterns
PPTX
サポート エンジニアが Azure Networking をじっくりたっぷり語りつくす会
PDF
AWS初心者向けWebinar AWSとのネットワーク接続入門
PPTX
サンプルで学ぶCassandraアプリケーションの作り方
PDF
MySQL Workbench をモデリングツールとして使ってみた
PPTX
バックログとタスクをインポート・エクスポート Team Foundation Server と Excel・Project との連携
PDF
Docker란 무엇인가? : Docker 기본 사용법
PDF
そんなトランザクションマネージャで大丈夫か?
PDF
PPTX
PDF
Ingress on Azure Kubernetes Service
PDF
Zabbix最新情報 ~Zabbix 6.0に向けて~ @OSC2021 Online/Fall
PDF
20210127 今日から始めるイベントドリブンアーキテクチャ AWS Expert Online #13
PPTX
PDF
Application Spring MVC/IOC & Hibernate
PDF
ADO.NETとORMとMicro-ORM -dapper dot netを使ってみた
PDF
20210127 AWS Black Belt Online Seminar Amazon Redshift 運用管理
PDF
PostgreSQLレプリケーション10周年!徹底紹介!(PostgreSQL Conference Japan 2019講演資料)
PPTX
Azure databases for PostgreSQL, MySQL and MariaDB
Viewers also liked
PDF
JS開発におけるTDDと自動テストツール利用の勘所
PDF
JavaScript Unit Test Why? What? How?
PDF
Jsテストツール 〜 sails.js×mochaでtest 〜 (1)
PDF
PPTX
Heroku meetup 13_shuttlebus-heroku
PPTX
PPTX
PDF
PPTX
PDF
カスタムアプリケーションプラットフォーム Salesforce Heroku�~ ソーシャルアプリケーションを支える技術 ~
PDF
Javascriptのあれやこれやをまとめて説明してみる
PDF
PDF
PDF
PDF
インフラエンジニアの綺麗で優しい手順書の書き方
PDF
More from Shunji Konishi
PPTX
PDF
PDF
PDF
WebSocketでリアルタイムクイズアプリを作ってみた
PDF
PPTX
PDF
Playframework1でSeleniumテスト
PPTX
PPTX
Dyno cycling behavior of Heroku
PPTX
PPTX
PDF
PPTX
PDF
PPTX
PPTX
High traffic questionnaire site
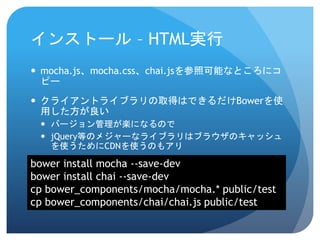
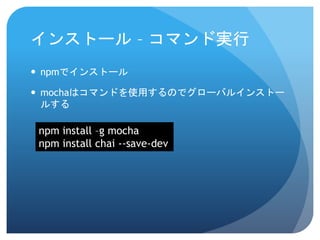
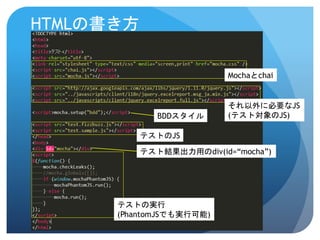
MochaとChaiでやるJavaScriptテスト 1. 2. 3. 4. 5. インストール–HTML実行
mocha.js、mocha.css、chai.jsを参照可能なところにコ ピー
クライアントライブラリの取得はできるだけBowerを使 用した方が良い
バージョン管理が楽になるので
jQuery等のメジャーなライブラリはブラウザのキャッシュ を使うためにCDNを使うのもアリ
bower install mocha --save-dev
bower install chai --save-dev
cpbower_components/mocha/mocha.* public/test
cpbower_components/chai/chai.js public/test 6. 7. 8. JSの書き方
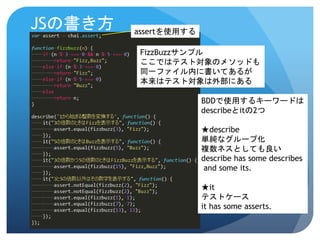
FizzBuzzサンプル
ここではテスト対象のメソッドも
同一ファイル内に書いてあるが
本来はテスト対象は外部にある
BDDで使用するキーワードは
describeとitの2つ
★describe
単純なグループ化
複数ネスとしても良い
describe has some describes
and some its.
★it
テストケース
it has some asserts.
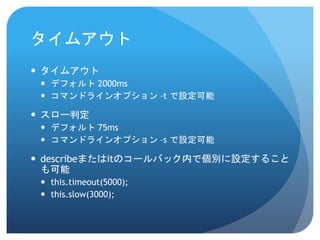
assertを使用する 9. 10. 11. タイムアウト
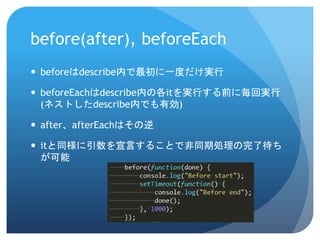
タイムアウト
デフォルト2000ms
コマンドラインオプション–tで設定可能
スロー判定
デフォルト75ms
コマンドラインオプション–s で設定可能
describeまたはitのコールバック内で個別に設定すること も可能
this.timeout(5000);
this.slow(3000); 12. 13. Http(s)モジュール
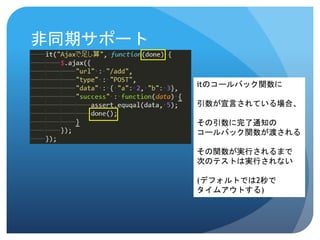
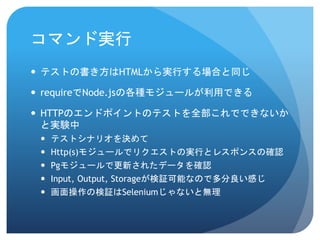
Node.js標準のhttpライブラリ
びっくりするぐらいRaw
Cookieを自分でセットしないとならない
POST文字列を自分でURLEncodeして組み立て
Content-TypeとかContent-Lengthの計算も自力
何故かデフォルトでChunked
ラッパーを開発中
jQuery#ajaxライクなdata引き渡し
レスポンス完了時のコールバック
Cookie等のHTTPヘッダも空気読んで追加
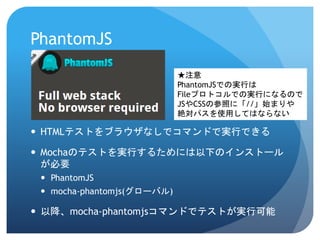
CSRFサポート 14. 15. 16. 17. メール送信のテストも出来るかも
メールテスト用のサーバをHeroku上に作成するというア イデアをちょっと思いついた
例えば新規ユーザ作成時にメールでユーザの存在確認を するような処理
Mochaからユーザ登録のURLをキック
メールアドレスはSendGridのParseAPI宛にしておく
テストサーバが受信メールをフックしてキャッシュに保存
Mochaからはテストサーバのポーリング、またはWebSocket で完了待ち
メールは数分以上遅延することがあるのが難点
が、うまくすれば汎用的なものを作れる可能性はある
HerokuButtonで公開するアプリとしてちょうど良いかも 18.