Download as PDF, PPTX
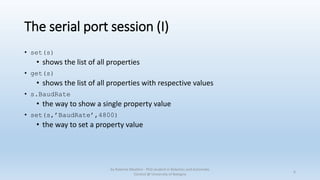
![Matlab Serial Port
Practical notes on Matlab serial port programming
by
Roberto Meattini
PhD student in Robotics and Automatic Control @ University of Bologna
roberto [dot] meattini2 [at] unibo [dot] it](https://image.slidesharecdn.com/matlabserialportppt-150504124619-conversion-gate01/85/Matlab-Serial-Port-1-320.jpg)

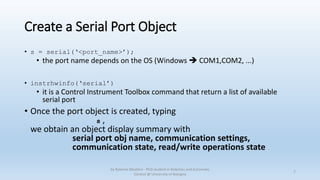


![Events and Callbacks (IV)
• Callback file, example:
function my_callback(obj,event[…others possible parameters …])
…
…
…
end
• If an error occurs during the callback execution
• the callback is automatically disabled
• a warning is shown
by Roberto Meattini - PhD student in Robotics and Automatic
Control @ University of Bologna
20](https://image.slidesharecdn.com/matlabserialportppt-150504124619-conversion-gate01/85/Matlab-Serial-Port-20-320.jpg)


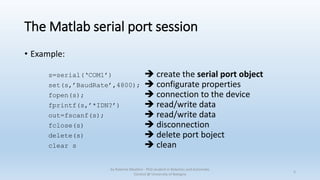
This document provides an overview of using Matlab to communicate with serial ports. It discusses creating a serial port object in Matlab, configuring communication settings like baud rate and data bits, and performing read/write operations both synchronously and asynchronously. It also covers using callbacks to execute functions when specific serial port events occur, like data being available to read.