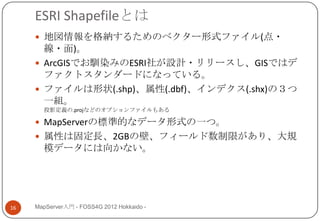
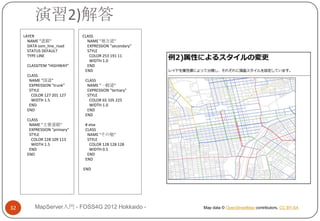
Mapfile解説 - 例2)属性によるスタイル設定
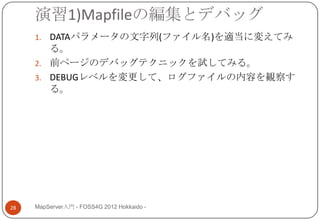
LAYER CLASSITEM・・・LAYERを分類するためのフィールド名
NAME "道路"
DATA osm_line_road EXPRESSION・・・CLASSITEMの属性値。各CLASSに一つ定義する。
STATUS DEFAULT LAYERの最後のCLASSでEXPRESSIONを定義しないことで「その他」を定
TYPE LINE 義できる。
CLASSITEM "HIGHWAY"
CLASS EXPRESSIONを宣言すると、そのLAYERではフィールド名を省略できる
EXPRESSION "trunk"
STYLE 。
COLOR 127 201 127
WIDTH 3.0
数値も文字列も引用符が必要。
END 複雑な条件は定義できない。
END
# else
CLASS
STYLE
COLOR 128 128 128
WIDTH 0.5
END
END
END
30 MapServer入門 - FOSS4G 2012 Hokkaido -
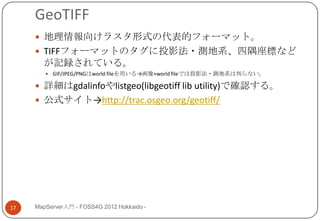
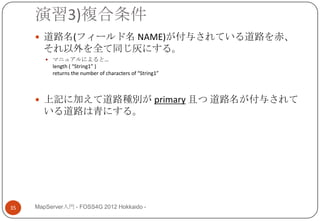
Mapfile解説 - 例4)ラベル(注記)表示
FONTSET "../fonts/fonts.list“
~~~~~~
mincho ipaexm.ttf
LAYER
gothic ipaexg.ttf
NAME "注記"
DATA osm_polygon
STATUS DEFAULT
TYPE POLYGON フィールド
名
LABELITEM "NAME"
~~~~~~
LABEL http://ossipedia.ipa.go.jp/ipafont/index.html
TYPE TRUETYPE
# FONT mincho
FONT gothic データソースの
#ENCODING SJIS 文字コード
ENCODING CP932
SIZE 8
COLOR 255 0 0
END
END
END
39 MapServer入門 - FOSS4G 2012 Hokkaido -

![インストールの前に…
Apacheがサービスとしてインストールされます
サービス名は[Apache MS4W Web Server]なので被らないはず。
インストール先はMS4Wのフォルダ内なので被らないはず。
Webブラウザで http://localhost/ を開く
→つながってしまったら…ひとまず停める。またはMS4Wインストール時にポートを変える。
テキストエディタはUTF8対応を使いましょう
Windows付属のメモ帳はちょっと…(BOMが付く)
TeraPad,Vim,Emacsなどがお勧め
MapServer入門 - FOSS4G 2012 Hokkaido -
4](https://image.slidesharecdn.com/mapserver-2010-120706215747-phpapp02/85/Map-server-FOSS4G-2012-Hokkaido-4-320.jpg)


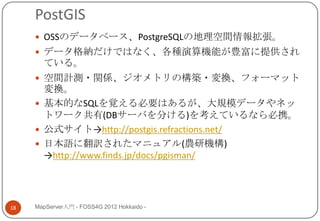
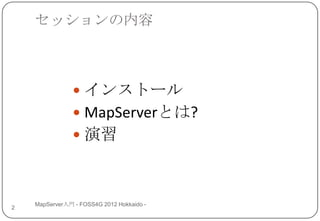
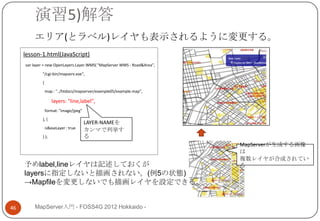
![例3)複合条件
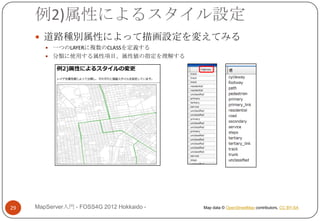
CLASSITEMのメリット・デメリット
メリット・・・EXPRESSIONのフィールド名を省略できる。
デメリット・・・単一条件しか指定できない。数値の大小が指定できない。条件毎にCLASSが必
要。
EXPRESSION http://mapserver.org/mapfile/expressions.html
複合条件を使う場合はCLASSITEMを使わずに、EXPRESSION
にフィールド名も含めて記述する
フィールド名を[]で囲む。文字列フィールドは”*フィール
ド名+”。
演算子は AND,OR,NOTあるいは&&,||,!の様に文字列・記号
の両方が使える。
33 MapServer入門 - FOSS4G 2012 Hokkaido -](https://image.slidesharecdn.com/mapserver-2010-120706215747-phpapp02/85/Map-server-FOSS4G-2012-Hokkaido-33-320.jpg)
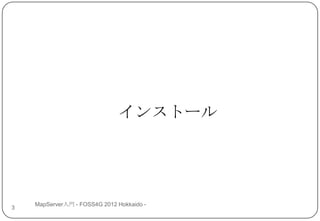
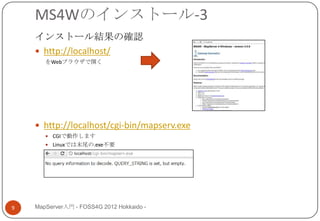
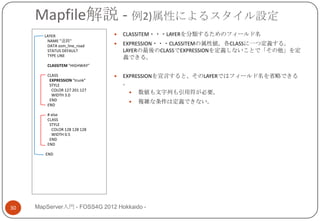
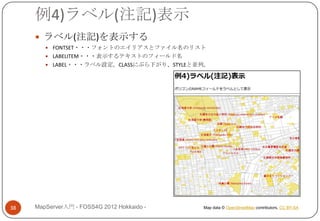
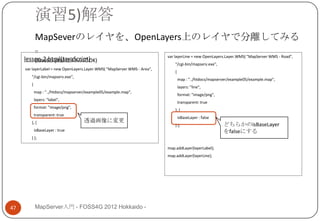
![Mapfile解説 - 例3)複合条件の例
# CLASSITEM "HIGHWAY" CLASSITEM
を
CLASS
無効に
NAME "国道"
EXPRESSION ("[HIGHWAY]" = "trunk")
STYLE
“*フィールド名+” = “属性
COLOR 127 201 127
値”
WIDTH 1.5
END
END
CLASS
NAME "主要道路/地方道/一般道"
EXPRESSION ("[HIGHWAY]" = "primary“ OR "[HIGHWAY]" eq "secondary“ || "[HIGHWAY]" = "tertiary“)
STYLE
COLOR 228 109 113
WIDTH 1.5 条件を()で囲む
END
END
34 MapServer入門 - FOSS4G 2012 Hokkaido - Map data © OpenStreetMap contributors, CC BY-SA](https://image.slidesharecdn.com/mapserver-2010-120706215747-phpapp02/85/Map-server-FOSS4G-2012-Hokkaido-34-320.jpg)
![演習3)解答
CLASS
NAME "名前付きの道路"
EXPRESSION (length("[name]") > 0)
STYLE
COLOR 255 32 32
WIDTH 2.0
END
END
CLASS
STYLE
COLOR 128 128 128
WIDTH 0.5
END
END
36 MapServer入門 - FOSS4G 2012 Hokkaido - Map data © OpenStreetMap contributors, CC BY-SA](https://image.slidesharecdn.com/mapserver-2010-120706215747-phpapp02/85/Map-server-FOSS4G-2012-Hokkaido-36-320.jpg)
![演習3)解答
CLASS
NAME "名前付きの主要道路"
EXPRESSION (length("[name]") > 0 && "[HIGHWAY]" = "primary")
STYLE
COLOR 32 32 255
WIDTH 2.0
END
END
CLASS
NAME "名前付きの道路(主要道路を除く)"
EXPRESSION (length("[name]") > 0)
STYLE
COLOR 255 32 32
WIDTH 2.0
END
END
CLASS
STYLE
COLOR 128 128 128
WIDTH 0.5
END
END
37 MapServer入門 - FOSS4G 2012 Hokkaido - Map data © OpenStreetMap contributors, CC BY-SA](https://image.slidesharecdn.com/mapserver-2010-120706215747-phpapp02/85/Map-server-FOSS4G-2012-Hokkaido-37-320.jpg)
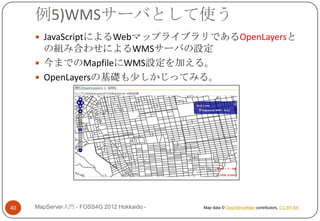
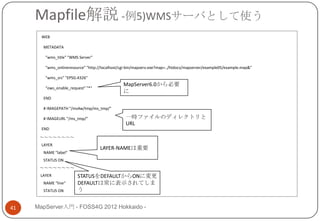
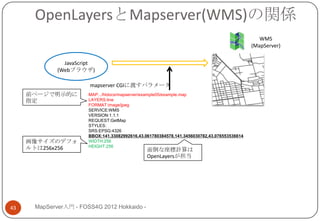
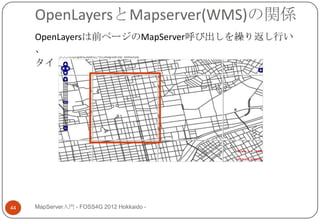
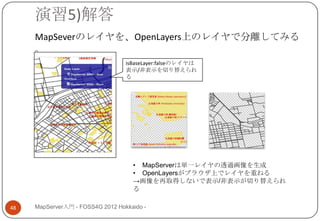
![OpenLayers解説 -例5)WMSサーバとして使う
<script type="text/javascript">
var lon = 141.360; map = new OpenLayers.Map( 'map', {
controls : controls,
var lat = 43.060;
maxScale : 1000,
var zoom = 8;
minScale : 500000
var map;
});
CGIに渡すパラメー var layer = new OpenLayers.Layer.WMS( "MapServer WMS",
function init(){ タ "/cgi-bin/mapserv.exe",
var controls = [ {
new OpenLayers.Control.MousePosition(), map : "../htdocs/mapserver/example05/example.map",
new OpenLayers.Control.KeyboardDefaults(), layers: "line",
new OpenLayers.Control.Navigation(), format: "image/jpeg“ 表示するレイヤ
new OpenLayers.Control.LayerSwitcher(), }, {
LAYER
new OpenLayers.Control.Scale(), isBaseLayer : true NAME “line”
new OpenLayers.Control.PanZoomBar() }
]; );
map.addLayer(layer);
map.setCenter(new OpenLayers.LonLat(lon, lat), zoom);
OpenLayersの
}
レイヤパラメータ
</script>
42 MapServer入門 - FOSS4G 2012 Hokkaido -](https://image.slidesharecdn.com/mapserver-2010-120706215747-phpapp02/85/Map-server-FOSS4G-2012-Hokkaido-42-320.jpg)
















![[DL輪読会] Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields](https://cdn.slidesharecdn.com/ss_thumbnails/realtimemultipersonposeestimation1-170907054459-thumbnail.jpg?width=640&height=640&fit=bounds)






























