Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Masahiko Hashimoto
2,516 views
Linuxデスクトップのお手軽セミナー 〜クラウドとかも使いこなしちゃえ〜
openSUSEをデスクトップで使えるの?という疑問を追求してみました。
Technology
◦
Read more
4
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 39
2
/ 39
3
/ 39
4
/ 39
5
/ 39
6
/ 39
7
/ 39
8
/ 39
9
/ 39
10
/ 39
11
/ 39
12
/ 39
13
/ 39
14
/ 39
15
/ 39
16
/ 39
17
/ 39
18
/ 39
19
/ 39
20
/ 39
21
/ 39
22
/ 39
23
/ 39
24
/ 39
25
/ 39
26
/ 39
27
/ 39
28
/ 39
29
/ 39
30
/ 39
31
/ 39
32
/ 39
33
/ 39
34
/ 39
35
/ 39
36
/ 39
37
/ 39
38
/ 39
39
/ 39
More Related Content
PDF
秘伝:クラウドに開発環境をえいっ!と構築する方法
by
Masahiko Hashimoto
PDF
AzureとSUSE Studioのあつ~い関係
by
Masahiko Hashimoto
PDF
Unityにmrubyを組み込んで抽選をしてみた
by
kishima7
PDF
イマドキのUbuntu活用法
by
Hiroshi Chonan
PDF
リリースされたばかりの『Ubuntu 16.04LTS』のすべて
by
Hiroshi Chonan
PDF
Ubuntuの最新情報 / Ubuntu 15.10 Wily Werewolf
by
Hiroshi Chonan
ODP
Windowsユーザのlinux入門(20130126)
by
Kimiyuki Yamauchi
PDF
セキュリティ&プログラミングキャンプ2009参加レポート (PDF版)
by
Shoot Morii
秘伝:クラウドに開発環境をえいっ!と構築する方法
by
Masahiko Hashimoto
AzureとSUSE Studioのあつ~い関係
by
Masahiko Hashimoto
Unityにmrubyを組み込んで抽選をしてみた
by
kishima7
イマドキのUbuntu活用法
by
Hiroshi Chonan
リリースされたばかりの『Ubuntu 16.04LTS』のすべて
by
Hiroshi Chonan
Ubuntuの最新情報 / Ubuntu 15.10 Wily Werewolf
by
Hiroshi Chonan
Windowsユーザのlinux入門(20130126)
by
Kimiyuki Yamauchi
セキュリティ&プログラミングキャンプ2009参加レポート (PDF版)
by
Shoot Morii
What's hot
PDF
NGUIでスクロールビュー
by
優之 田中
ODP
Osc Nagoya2014 Linux MInt Japan まとめ
by
Souichirou Ishikawa
PPT
OSSと私
by
Keisuke Kamada
ODP
Qt のコミュニティと日本語での情報発信②
by
Yikei Lu
PDF
Ubuntu 15.04 アーリープレビュー & Ubuntu Core入門
by
Hiroshi Chonan
PDF
NGUI基礎
by
優之 田中
PPTX
InstallingOpenIndiana (Tokyo OpenSolaris 勉強会 2020.06)
by
Yozo Toda
PDF
First linux contact
by
Hidetsugu Takahashi
ODP
統一Qtコミュニティー
by
Yikei Lu
PDF
鹿児島らぐはじめました & オープ ンソースアンカンファレンス鹿児 島のお誘い
by
Kenichiro MATOHARA
PDF
WindowsではじめるROSプログラミング
by
Takayuki Goto
PDF
通信対戦ゲームを作った話
by
mipsparc
PDF
pieniというFWを作ってみる。
by
Kenta Saito
PDF
アヒルヤキを変換してみよう
by
Masahiko Hashimoto
PDF
Setting up M17N Environment with ibus 1.5
by
Masataka Kondo
PDF
タイル型ウィンドウマネージャのススメ
by
Takuto Matsuu
PDF
松本Linux勉強会 vagrant入門
by
Shiojiri Ohhara
PDF
Submitwordpresspy
by
Tetsuo Mitsuda
PDF
プロ生ちゃんをひろっちゃう!
by
Kouji Matsui
PDF
X window managerで遊んでみた
by
Masahiko Hashimoto
NGUIでスクロールビュー
by
優之 田中
Osc Nagoya2014 Linux MInt Japan まとめ
by
Souichirou Ishikawa
OSSと私
by
Keisuke Kamada
Qt のコミュニティと日本語での情報発信②
by
Yikei Lu
Ubuntu 15.04 アーリープレビュー & Ubuntu Core入門
by
Hiroshi Chonan
NGUI基礎
by
優之 田中
InstallingOpenIndiana (Tokyo OpenSolaris 勉強会 2020.06)
by
Yozo Toda
First linux contact
by
Hidetsugu Takahashi
統一Qtコミュニティー
by
Yikei Lu
鹿児島らぐはじめました & オープ ンソースアンカンファレンス鹿児 島のお誘い
by
Kenichiro MATOHARA
WindowsではじめるROSプログラミング
by
Takayuki Goto
通信対戦ゲームを作った話
by
mipsparc
pieniというFWを作ってみる。
by
Kenta Saito
アヒルヤキを変換してみよう
by
Masahiko Hashimoto
Setting up M17N Environment with ibus 1.5
by
Masataka Kondo
タイル型ウィンドウマネージャのススメ
by
Takuto Matsuu
松本Linux勉強会 vagrant入門
by
Shiojiri Ohhara
Submitwordpresspy
by
Tetsuo Mitsuda
プロ生ちゃんをひろっちゃう!
by
Kouji Matsui
X window managerで遊んでみた
by
Masahiko Hashimoto
Viewers also liked
PDF
OSS に貢献しよう!―OSS の明るい未来のために!―
by
Fuminobu Takeyama
PDF
オープンソースで始める「超」VPN 構築術
by
Masahiko Hashimoto
PDF
Getting Started on Packaging Apps with Open Build Service
by
Andi Sugandi
PDF
SCAP for openSUSE
by
Kazuki Omo
PDF
How to make multi-boot USB drive for LiveCD iso images on EFI/UEFI and BIOS
by
Kentaro Hatori
PDF
バグ報告・翻訳・パッケージング・コード修正・広報活動などなど―OSS に貢献してみるには?
by
Fuminobu Takeyama
PDF
Proposal of openSUSE.Asia Summit 2017
by
Fuminobu Takeyama
PDF
20161106 osc-tokyo-lt-asia-summit
by
Fuminobu Takeyama
PDF
20161106 osc-tokyo-command-line
by
Fuminobu Takeyama
ODP
How to Contribute to FOSS
by
princeofgiri
PDF
今さら聞けない Linux コマンドラインツールテクニック その1 rev. 2
by
Fuminobu Takeyama
PDF
今さら聞けない! Linux コマンドラインツールテクニック その1 rev. 3
by
Fuminobu Takeyama
OSS に貢献しよう!―OSS の明るい未来のために!―
by
Fuminobu Takeyama
オープンソースで始める「超」VPN 構築術
by
Masahiko Hashimoto
Getting Started on Packaging Apps with Open Build Service
by
Andi Sugandi
SCAP for openSUSE
by
Kazuki Omo
How to make multi-boot USB drive for LiveCD iso images on EFI/UEFI and BIOS
by
Kentaro Hatori
バグ報告・翻訳・パッケージング・コード修正・広報活動などなど―OSS に貢献してみるには?
by
Fuminobu Takeyama
Proposal of openSUSE.Asia Summit 2017
by
Fuminobu Takeyama
20161106 osc-tokyo-lt-asia-summit
by
Fuminobu Takeyama
20161106 osc-tokyo-command-line
by
Fuminobu Takeyama
How to Contribute to FOSS
by
princeofgiri
今さら聞けない Linux コマンドラインツールテクニック その1 rev. 2
by
Fuminobu Takeyama
今さら聞けない! Linux コマンドラインツールテクニック その1 rev. 3
by
Fuminobu Takeyama
Similar to Linuxデスクトップのお手軽セミナー 〜クラウドとかも使いこなしちゃえ〜
PDF
サーバーだけじゃない! Linux デスクトップを使い倒そう! その1
by
Fuminobu Takeyama
PDF
講座Linux入門・デスクトップOSとしてのLinux
by
Tokai University
PPT
Linuxとオープンソースの世界
by
Hiroe Orz
PDF
クラウドインフラのゲスト OS は openSUSE で—今までの&新しい openSUSE 活用法の紹介
by
Fuminobu Takeyama
PDF
20130615 未経験ok linux
by
Takahiro Kujirai
PDF
azureから使うlinux
by
Trainocate Japan, Ltd.
ODP
Linux学習ロードマップ
by
akihito_s
PDF
20141004 ゼウス・ラーニングパワーlinuxサーバ構築セミナー
by
Takahiro Kujirai
PDF
サーバーだけじゃない!Linux デスクトップを使い倒そう!その2
by
Fuminobu Takeyama
PDF
Microsoft Azureから使うLinux
by
Trainocate Japan, Ltd.
PDF
OpenNebula on Ubuntu
by
autumnalsky
PDF
Lxc で始めるケチケチ仮想化生活?!
by
Etsuji Nakai
PDF
linux基礎_新卒エンジニア勉強会20130404
by
エンジニア勉強会 エスキュービズム
PDF
20170124 linux basic_1
by
YUSUKE MORIZUMI
サーバーだけじゃない! Linux デスクトップを使い倒そう! その1
by
Fuminobu Takeyama
講座Linux入門・デスクトップOSとしてのLinux
by
Tokai University
Linuxとオープンソースの世界
by
Hiroe Orz
クラウドインフラのゲスト OS は openSUSE で—今までの&新しい openSUSE 活用法の紹介
by
Fuminobu Takeyama
20130615 未経験ok linux
by
Takahiro Kujirai
azureから使うlinux
by
Trainocate Japan, Ltd.
Linux学習ロードマップ
by
akihito_s
20141004 ゼウス・ラーニングパワーlinuxサーバ構築セミナー
by
Takahiro Kujirai
サーバーだけじゃない!Linux デスクトップを使い倒そう!その2
by
Fuminobu Takeyama
Microsoft Azureから使うLinux
by
Trainocate Japan, Ltd.
OpenNebula on Ubuntu
by
autumnalsky
Lxc で始めるケチケチ仮想化生活?!
by
Etsuji Nakai
linux基礎_新卒エンジニア勉強会20130404
by
エンジニア勉強会 エスキュービズム
20170124 linux basic_1
by
YUSUKE MORIZUMI
Linuxデスクトップのお手軽セミナー 〜クラウドとかも使いこなしちゃえ〜
1.
1 Linuxデスクトップのお手軽セミナー 〜クラウドとかも使いこなしちゃえ〜 はしもとまさ@日本openSUSEユーザ会
2.
2 自己紹介 ● 日本openSUSEユーザ会の人 ● 昨年まで名古屋(の南の大府市)在住。 ● 東海道らぐ(元)名古屋案内人 – 東海道 Linux
User Groupの略。 – 今年も名古屋(&浜松?)でオフ会多分やります! ● 文系学部出身のシステムエンジニアです。
3.
3 本日のおしながき ● デスクトップLinuxって使えるの? ● クラウドサービスと連携してみよう! ● 自前クラウドサービスを構築してみよう!
4.
4 本日の注意書き。 ● 最後ですが初心者向けな軽〜いお話をします。 ● セミナー時間が15分なのに、スライドが39 枚あります!(^^; ● 聞き逃したところがありましたら、後ほど私の ところに質問に来ていただくか、このセミナー の資料は後ほどブログにアップしますので、そ ちらでご確認ください。 – http://blog.geeko.jp
5.
5 1. デスクトップLinuxって使えるの?
6.
6 デスクトップLinuxって? ● 突然ですが、デスクトップなLinuxって使った ことありますか? – 普段仕事で使うLinuxってサーバーですよね? – 組み込み用途でも使う方がいるかも。 –
デスクトップは・・・。 ● やっぱしWindowsでしょうか???
7.
7 時代はIoT! ● モノのインターネットの時代。 – Internet of
Things – テレビ、プリンタ、デジカメ・・・etc... – 何でもかんでもインターネットに繋がる時代です。 ● 何でもWindowsが入ってるの? – 答えは「否」。
8.
8 最近のプリンタの話。(脱線?) ● 例:brotherのプリンタの話。 – クラウドサービスに直接アクセスします! – Evernote,
Dropbox, GoogleDrive, Facebook… – PCなしでクラウドサービスから画像などをダウン ロードして、そのまま印刷します。
9.
9 つまり。 ● OSなんて関係ない! – …という時代がすぐそこまで来ている? – 東芝も4月にChromebookを発売しようとしてい る。 ● ChromeOS(Googleが開発しているLinuxベースの OS)を搭載したノートPCのこと。 ● 今流行り(?)のHTML5が普及すれば、さらに OSなど関係ない時代が来るのではないか? –
Webブラウザでどんなアプリでも動く時代が来 る?
10.
10 前置きが長くなりましたが。 ● 本日の案内役。ぎーこくんです。 – openSUSEのマスコットです。 – openSUSEはLinuxディストリビューションの一つ です。 ● 海外で人気です。 OSC東京の 「キャラクター大集合」では 13位(15匹?中)でした…orz
11.
11 openSUSEを使ってみよう! ● どうやって使うか? – WindowsPCに仮想PCをインストールしてその上 で動かす! ● 一番お手軽です。 – Windows
XPが入ってた古いPCに入れて Linux を インストールして再利用! – VPSサービスを利用して放り込む! ● さくらインターネットなどでLinuxを入れてみる。 – Raspberry Piに入れて遊ぶ!
12.
12 今どきのおすすめ。 ● Raspberry piに入れてみよう! – TypeB
512MBならAmazonで4330円。 ● 利点は、SDカード1枚でディストリビューション を変えることができること。 – PCに入れてしまうと、他のディストリビューションや OSとかの切り替えが面倒だし。。。 – いろんなディストリビューションを試してみよう! ● イメージのダウンロードはこちらから。 – https://en.opensuse.org/HCL:Raspberry_Pi
13.
13 古いPCに入れる場合は… ● よく言われること。 – 「openSUSEって重いよね〜!」 ● それはたぶん「嘘」です。 – サーバー機能しか入れてない場合に重いわけがない。 ● 重いのは、KDEだと思います^^; –
インストール時に、「KDE」「GNOME」「その 他」という選択肢が出てきたら、「その 他」→「XFCE」みたいに選んでみましょう。 ● ただし、メモリはあればあるほどいいです。
14.
14 XFCE? なにそれ。 ● Linux、というより X
Window System に は、ウィンドゥマネージャーというものが存在 し、それを変更することで、外観などがガラッ と変わります。 – X Window System ● 主に Unix で使用される GUI を構築するためのプロトコ ルです。
15.
15 KDE ● openSUSEで使用されることが多いです。
16.
16 GNOME ● fedora等、多くのディストリビューションで利用されています。
17.
17 XFCE ● 軽量、且つ高速なWindowManagerです。
18.
18 いろいろ試してみよう。 ● X Window Manager
は他にも多くの種類があ ります。 ● 自分の使い方や好み、PCのスペックに合わせ て、いろいろ変更できるのが、Linuxの利点で もありますね! ぎーこもいろいろな 積み方を試してみる(笑)
19.
19 2. クラウドサービスと連携してみよう
20.
20 Windowsから離れて一番面倒なこと。 ● Windowsでしか動かないソフト、開けない ファイルが多すぎる!?? – これが一番の不安要素と思われる方も多いはず。 – 正直、Windows専用の専門ソフトについては、ほ ぼ諦めてください^^; ● 運が良ければ、Wineというソフトを使えばWindowsソ フトがLinuxでも動くかも。 –
Word, Excelなどは、ちょっと我慢すれば Linux でも問題ないはず!
21.
21 みんな大好き?LibreOffice ● クラウドではありませんが・・・ ● WordやExcelのファイルももちろん開くことが できます。 ● このプレゼン資料(Impress)も、本日配布して いるビラ(Draw)も、LibreOfficeで作成して います。 ● いろいろ万能です!!! ● が、Wordなどのファイルを開くと、若干レイア ウトがずれてしまうことも…?
22.
22 Microsoft OneDrive ● Microsoft純正のクラウドサービス! – https://onedrive.live.com/ –
「作成」ボタンを押すとおよそOfficeが起動します。
23.
23 Google Drive ● Googleも似たようなのがありますね。 – http://www.google.com/drive/ –
「Create」ボタンでそれっぽいものが起動します。
24.
24 ファイル編集はできませんが… ● 他にもいろいろなサービスがあります。 – ファイル共有系 ● Dropbox ● Box.net – ノート系 ● Evernote ● Linux
のクライアントソフトがなくて も、Webブラウザの上で操作できますよね!
25.
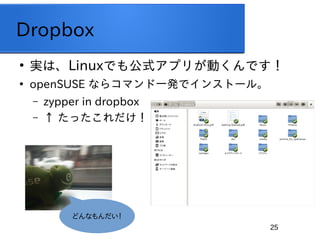
25 Dropbox ● 実は、Linuxでも公式アプリが動くんです! ● openSUSE ならコマンド一発でインストール。 – zypper
in dropbox – ↑ たったこれだけ! どんなもんだい!
26.
26 Evernote ● 残念ながらこちらは公式アプリはないです。 ● が、NixNoteというアプリが使えます。 – http://sourceforge.jp/projects/sfnet_nevern ote/ ● nixnote-1.6-2.x86_64.rpm (64bit) ● nixnote-1.6-2.i386.rpm
(32bit) – インストール方法は下記のコマンドで。 ● sudo rpm -Uvh nixnote-1.6-2.x86_64.rpm
27.
27 アプリがなければ自分で作っちゃえ! ● およそクラウドサービスは接続するためのAPI が公開されています。それを利用すれば、自作 アプリも作れます! – 冒頭で紹介したプリンタ等も公開されているAPIを 利用して動いています。 APIがオープンということは どんなOSでもどんな端末でも 動くってことだよね!
28.
28 3. 自前クラウドサービスを構築してみよう
29.
29 せっかくLinuxを使うのなら… ● Linuxっぽい使い方をしてみたい! – サーバーを構築する??? ● OwnCloudというソフトがあります! – 自前クラウドサービス構築ソフト! –
Dropboxみたいなものを自作してしまおう! ● HDDさえあれば容量無制限! ● ここから先はちょっと中級者向け。 – セキュリティ設定などが発生しますので。 – 初心者の方は、インターネットに公開しない自宅サーバーを 構築して練習してみましょう!
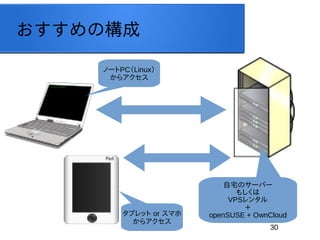
30.
30 おすすめの構成 自宅のサーバー もしくは VPSレンタル + openSUSE + OwnCloud ノートPC(Linux) からアクセス タブレット
or スマホ からアクセス
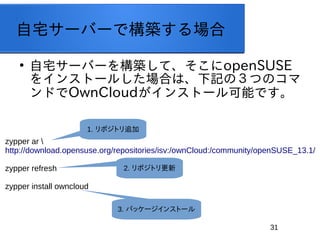
31.
31 自宅サーバーで構築する場合 ● 自宅サーバーを構築して、そこにopenSUSE をインストールした場合は、下記の3つのコマ ンドでOwnCloudがインストール可能です。 zypper ar http://download.opensuse.org/repositories/isv:/ownCloud:/community/openSUSE_13.1/ zypper
refresh zypper install owncloud 1. リポジトリ追加 2. リポジトリ更新 3. パッケージインストール
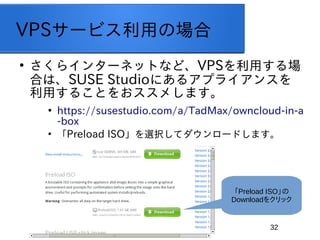
32.
32 VPSサービス利用の場合 ● さくらインターネットなど、VPSを利用する場 合は、SUSE Studioにあるアプライアンスを 利用することをおススメします。 ● https://susestudio.com/a/TadMax/owncloud-in-a -box ● 「Preload ISO」を選択してダウンロードします。 「Preload
ISO」の Downloadをクリック
33.
33 VPSにインストール ● Preload ISOファイルをVPSサービスにアップロー ドして起動すると、インストーラーが自動で立ち上 がります。 – 画面の支持に従って、インストールを進めていきましょ う。(英語ですが…) –
インストールが完了したら、ユーザ「root」、パスワー ド「linux」でログインして、IPアドレスを確認してく ださい。 – 確認が終わったら、セキュリティ確保を忘れずに! ● 一般ユーザ作成、SSH鍵登録、パスワードログイン無効化 etc...
34.
34 OwnCloud起動! ● ブラウザから下記のURLを入力。 ● http://(サーバーのIP)/owncloud – 自宅サーバで起動した方は、パスワードを自分で設 定します。 – アプライアンスをVPSにインストールした方は、 ユーザ「admin」、パスワード「owncloud42」 でログインしてください。
35.
35 じゃ〜ん!
36.
36 余談(注意点) ● 勘の鋭い方は気づいたと思いますが、URLが 「http」、つまり平文で流れています(^^; ● SSLで通信暗号化する場合は、別途対応が必要 です。 – 通信暗号化しない場合は、秘密情報を絶対に流さな いでください! ● 初心者の方は、VPSではなく、自宅サーバーで 構築し、インターネットに公開しないで練習す ることをおススメします。 ● あくまでも自己責任でお願いします^^
37.
37 最後に。
38.
38 Linux はただの無料ソフトじゃない! ● Linuxを使用する理由は、いろいろあると思いますが、私は「無料 だから使う」という考えではありません。 ● オープンソースの醍醐味は「自分でソースコードを追いかける」 ところにあると思っています。 ● ここを直したいけど、直せない!なんてことは、基本的に Linux には存在しません。 –
ミッションクリティカルな現場であればあるほど、オープンソースが使わ れてると言われています。 – 自分が技術的に直せないのであれば、バグ報告をすれば誰かが直してくれ る…かもしれないし。 ● ほんの些細なこと(テストなど)でも、皆で少しずつオープン ソースに関わっていけば、素晴らしいソフトが完成すると思いま せんか?
39.
39 ご清聴ありがとうございました。
Download