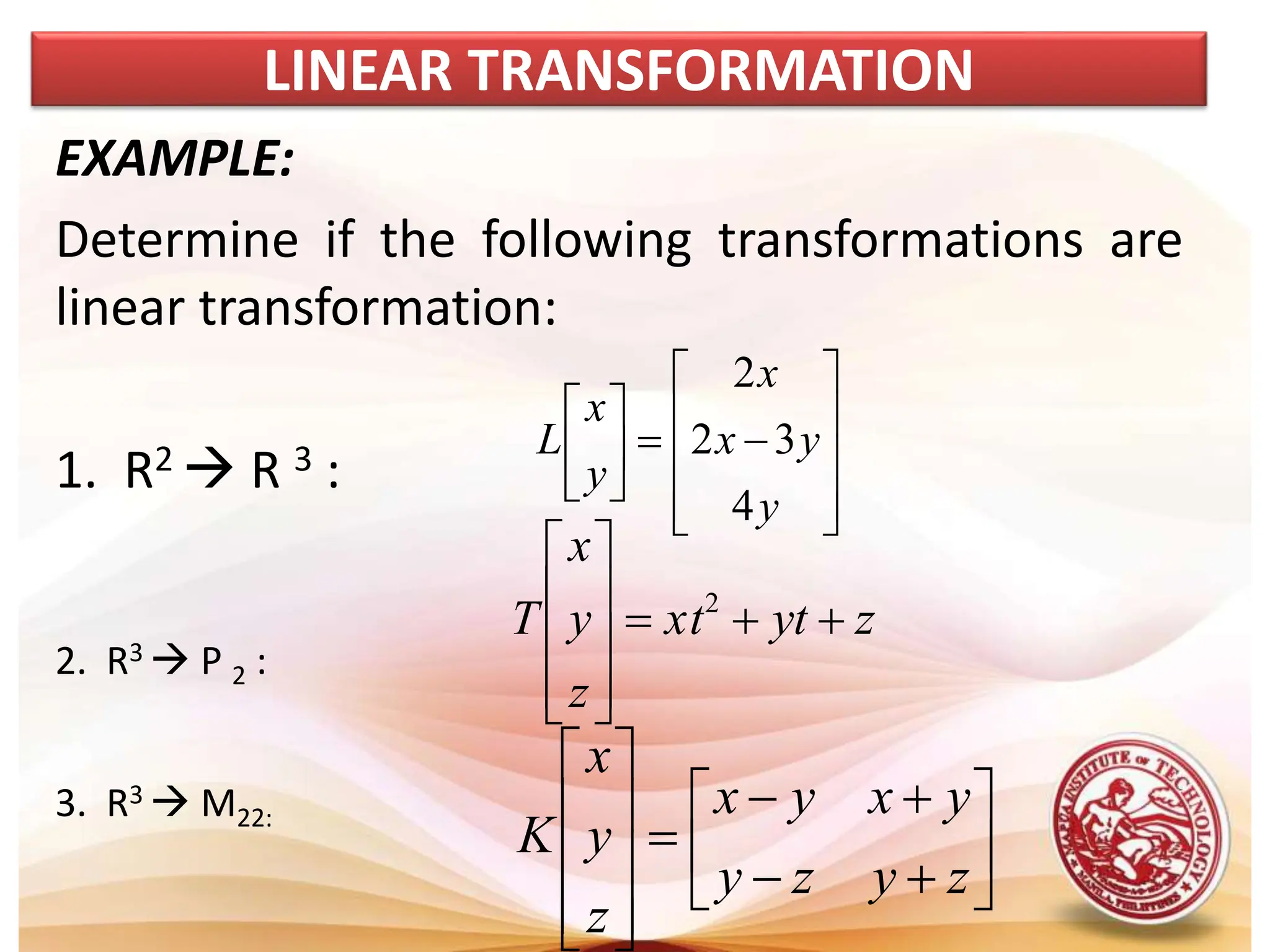
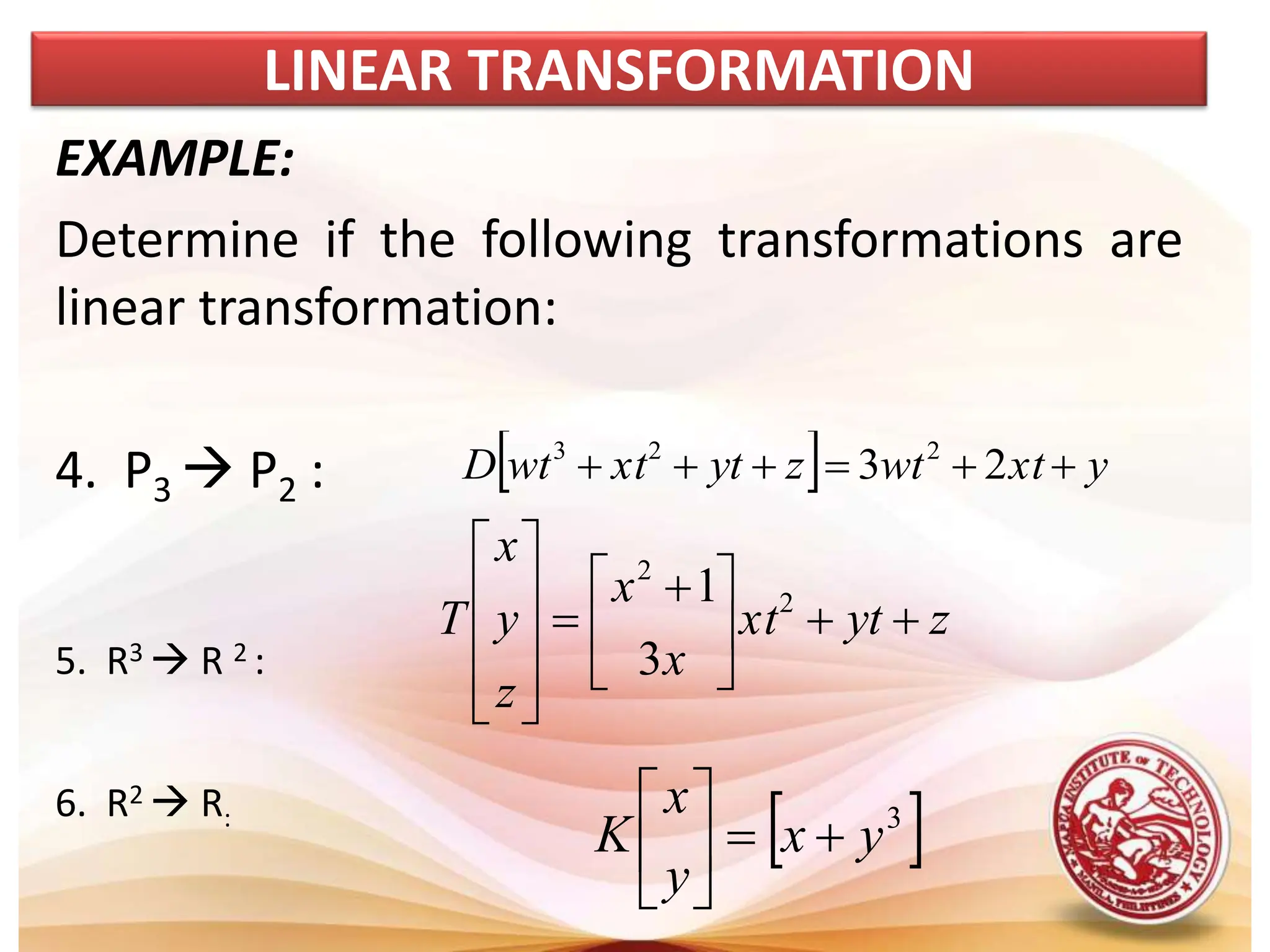
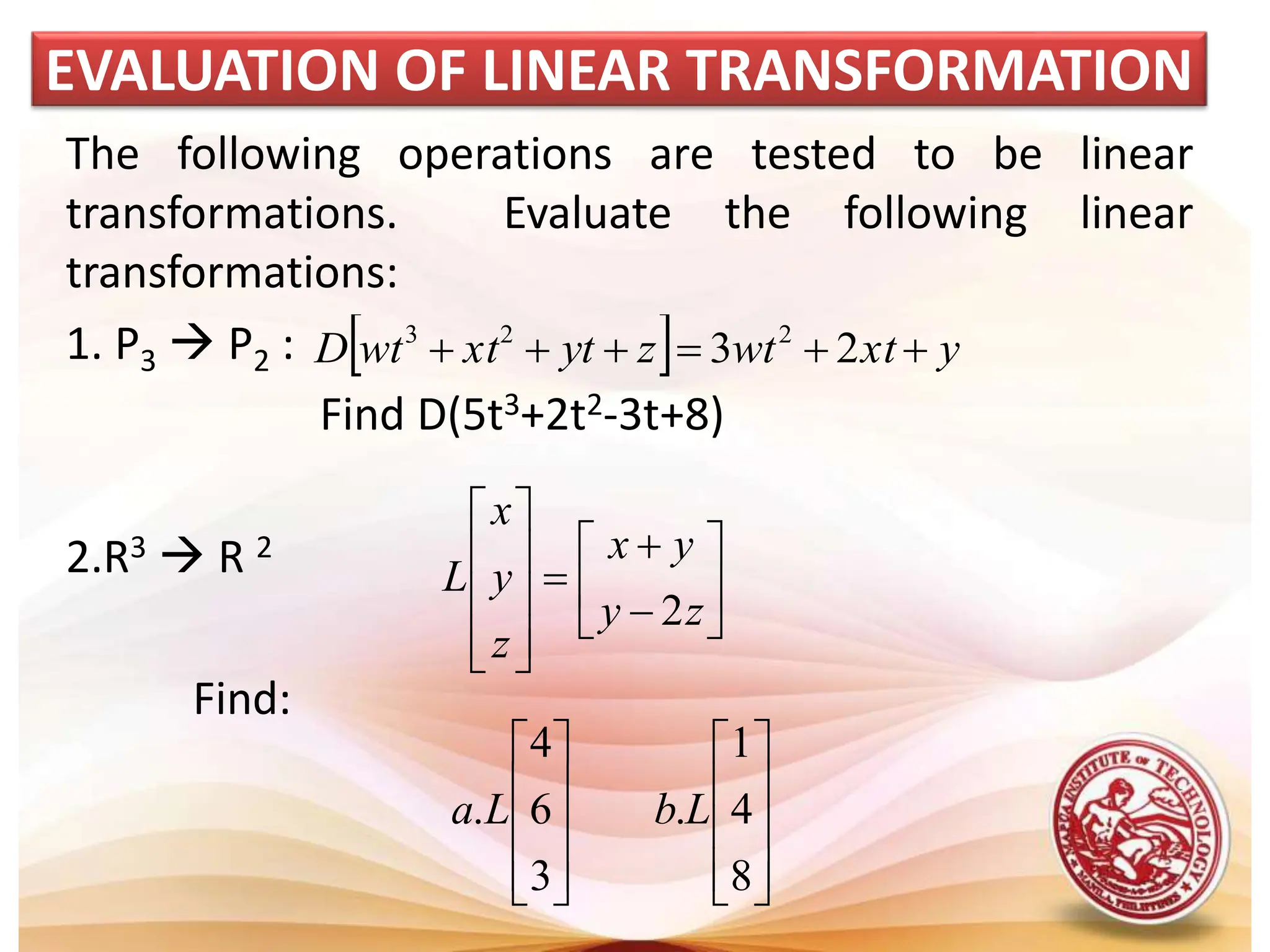
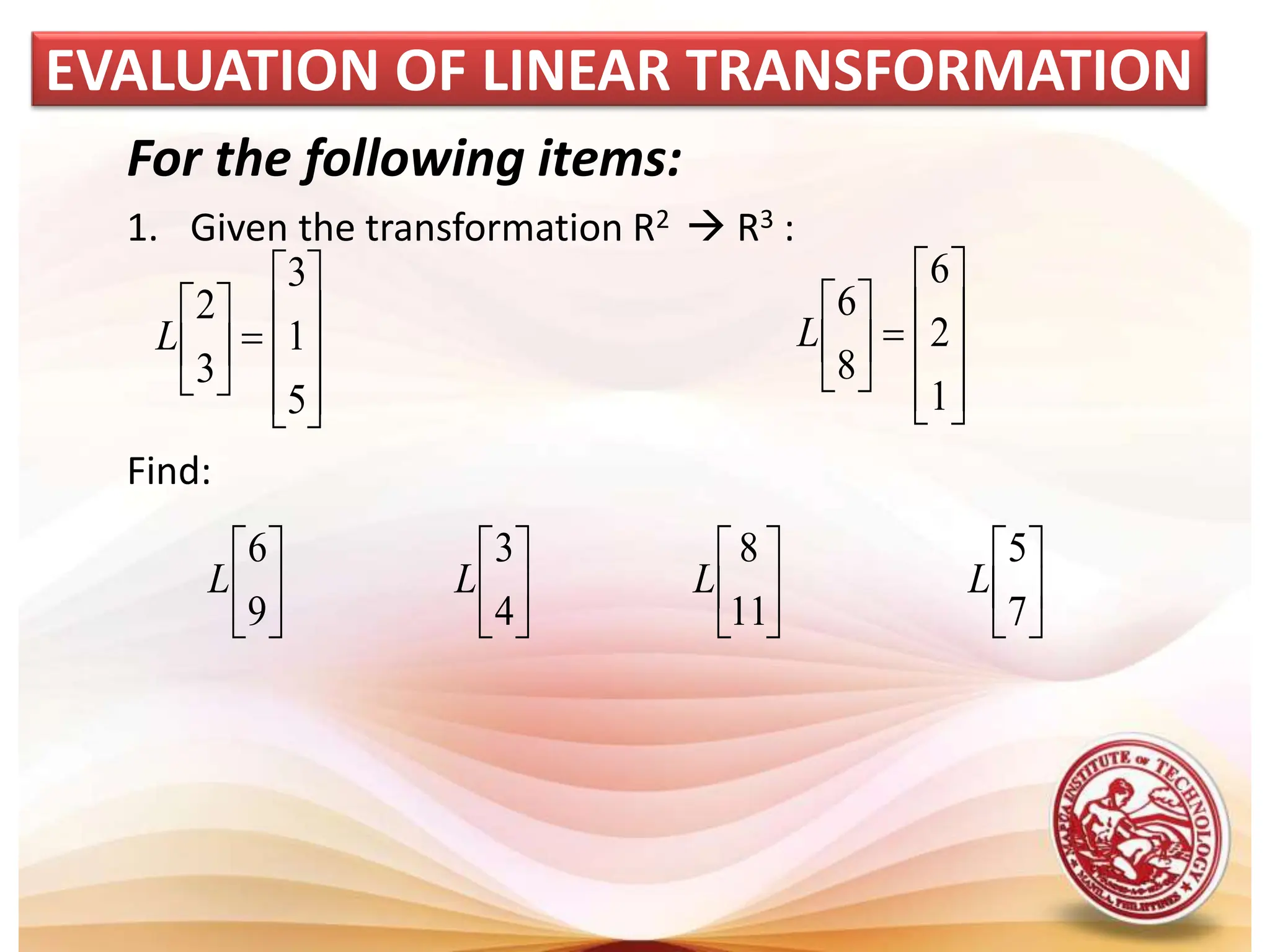
This document defines and discusses linear transformations. It begins by defining a linear transformation as a function where the transformation of the sum of two vectors is equal to the sum of the individual transformations and where transformation and scalar multiplication commute. It then provides examples of determining if specific transformations are linear and evaluating linear transformations. Finally, it discusses properties of linear transformations such as being one-to-one, kernels, ranges, and whether a transformation is onto.
![DEFINITION:
A transformation 𝐿 is a linear transformation if
the following expressions hold:
For any real number:
Linear Transformation
]
[
]
[
]
[ v
L
u
L
v
u
L
]
[
]
[ u
kL
ku
L ](https://image.slidesharecdn.com/l13-lineartransformation-240312094728-fa381a71/75/Linear-Algebra-Linear-Transformation-pptx-3-2048.jpg)