The document provides information on the L6238 sensorless spindle motor controller integrated circuit. Key features include:
- Sensorless commutation and speed control of a 3-phase brushless DC spindle motor.
- Integrated start-up and synchronization algorithms for spin-up and multi-drive arrays.
- Digital PLL for high accuracy speed control and locking to a reference frequency.
- Protection features and programmable functions for efficiency and noise reduction.
- Master/slave synchronization capability and bidirectional serial communication interface.



![a)the spindle is stopped.
b)the system is still running at a speed that
allows for resynchronization.
In order to minimize the ramp up time, the micro-
controller has the possibility to:
check the SPIN SENSE pin, (which toggles at
the Bemf zero crossing frequency)
enable the power to the motor based on the
previous information. Otherwise the uP may is-
sue a Brake command, followed by the start-
up procedure after the motor has stopped spin-
ning.
Brake
W/Mask
Hold & wait
for decision
Tri-state
W/Mask
Tri-state
W/Mask
RunBrk = 1
OutEna = 0
RunBrk = 1
OutEna = 1
OutEna = 1
&
RunBrk = 0
Run
W/Mask
Hold for
”Align & Go”
RunBrk
=
0
OutEna
=
0
Power
on
Reset
OutEna
=
1
RunBrk
=
1
RunBrk
=
0
RunBrk = 0
OutEna = 0
SeqInc = X
R
u
n
B
r
a
k
e
=
1
R
u
n
B
r
a
k
e
=
0
Run
Wo/Mask
SeqInc = 0
SeqInc = 1
SeqInc = 0
SeqInc = 1
Action across
line increments
sequencer
Auto Start-up
Enabled Disabled
RunBrk = 1
OutEna = 0
RunBrk = 1
OutEna = 1
O
u
t
E
n
a
=
0
O
u
t
E
n
a
=
1
Hold for
”Align & Go”
Start
”Align & Go”
Align =
Seqncr.
[Align
to
Phase
#
1]
StkRtr
=
0
[Align
to
Phase
#
3]
O
u
t
E
n
a
=
0
O
u
t
E
n
a
=
0
O
u
t
E
n
a
=
0
Align =
0
G
o =
0
Align
=
1
RunBrk
=
1
From Anywhere
Hold
for
”Resync”
Start
”Resync”
Resync = 1
Release
min mask
Run
G
o =
1
(Get
1st
Zc)
Zc
Reset
=
RunBrk = 1
OutEna = 0
O
u
t
E
n
a
=
0
O
u
t
E
n
a
=
0
O
u
t
E
n
a
=
0
No Zc
No Zc
Auto/Ext = 0
Stuck
Rotor
(hold)
(G
et 2
nd Z
c)
Zc R
eset=
OutEna = 1
&
RunBrk = 1
StrRtr = 0
StrRtr = 0
Mono
=
0
RunBrk = 0
&
OutEna = 0
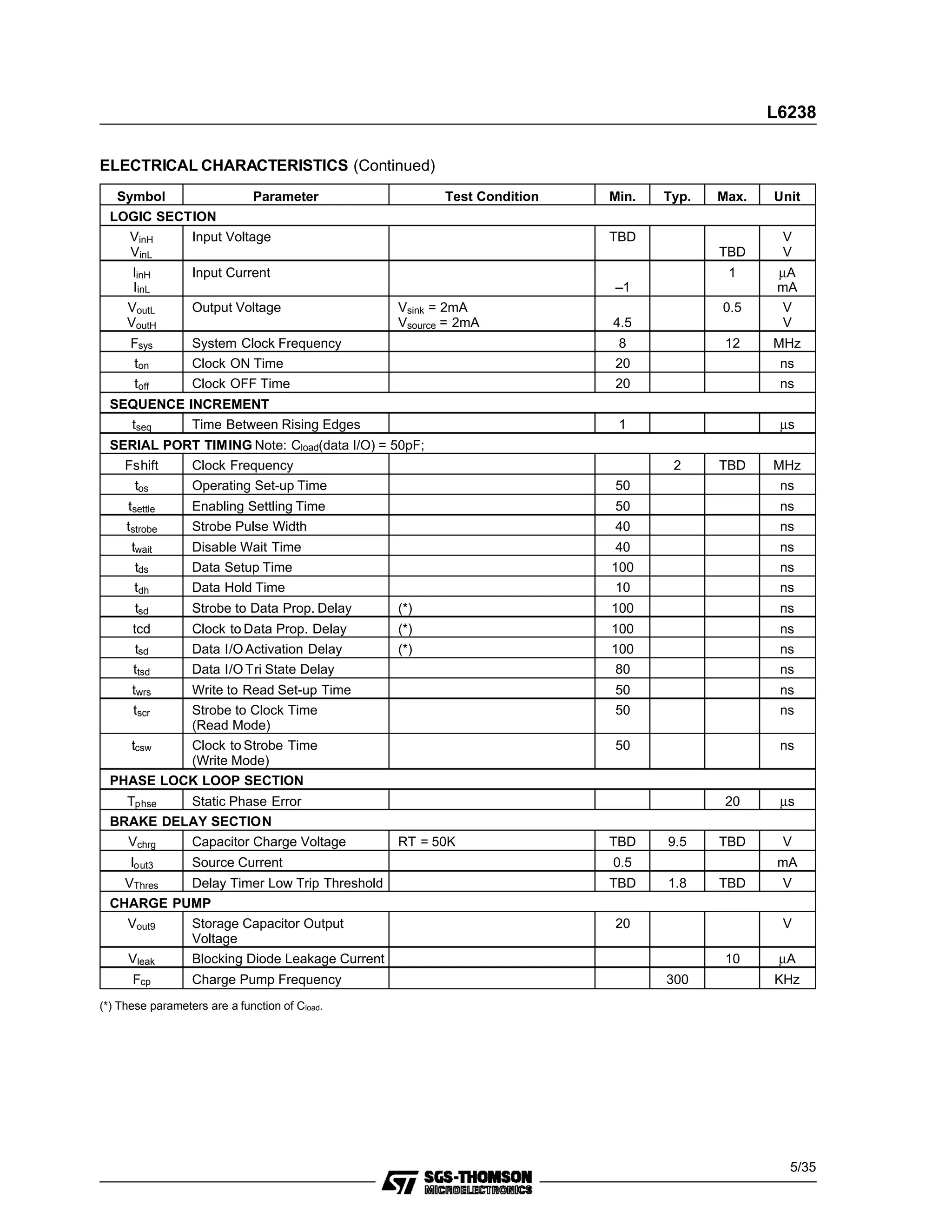
Figure 4: State Diagram
L6238
8/35](https://image.slidesharecdn.com/l62831-230514150940-a716bb15/75/L6283-1-3-pdf-8-2048.jpg)
![2.0 STATE DIAGRAMS
2.1 State Diagram
Figure 4 is a complete State Diagram of the con-
troller depicting the operational flow as a function
of the control pins and motor status. The flow can
be separatedinto four distinct operations.
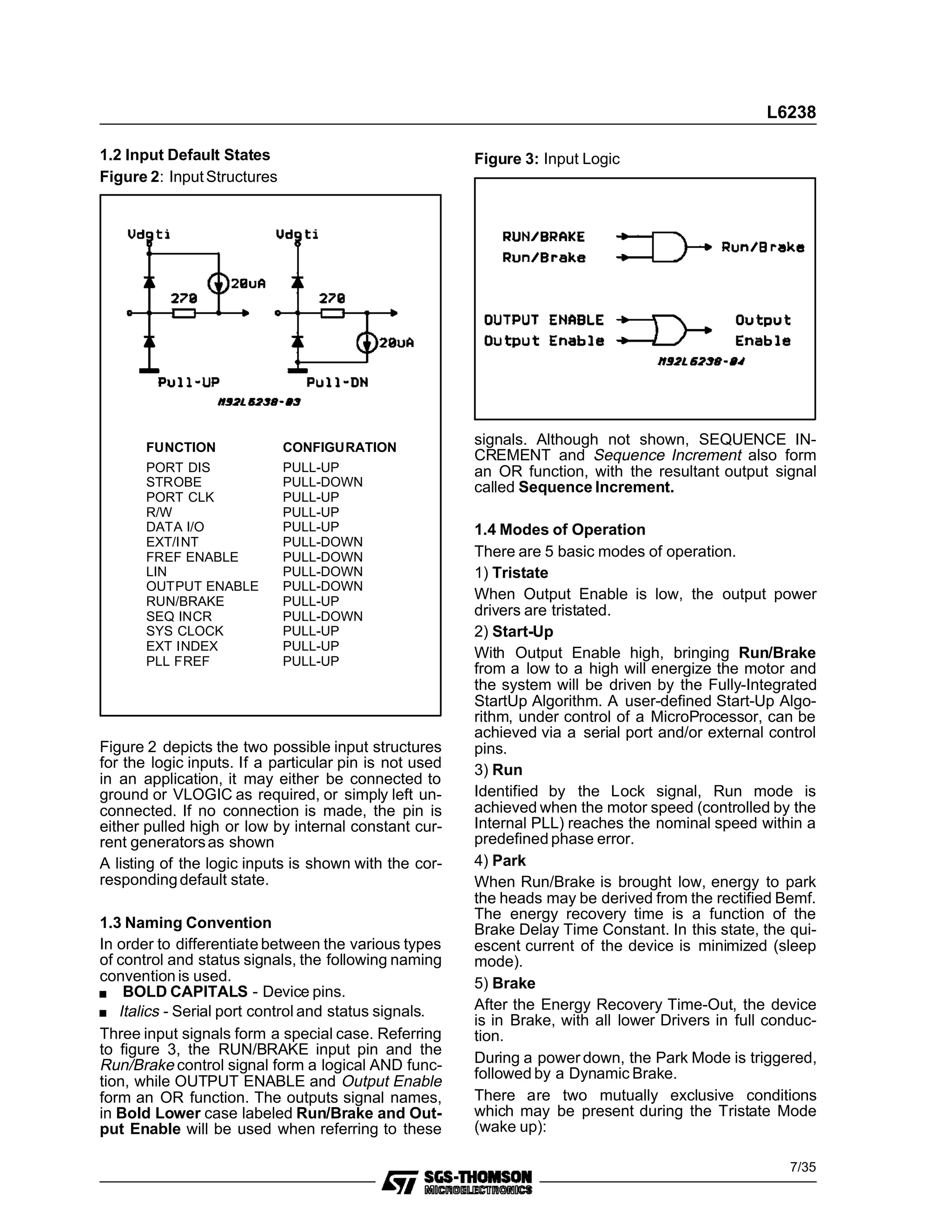
2.2 Align + Go
Figure 5 represent the normal flow that will
achieve a spin-up and phase lock of the spindle
motor. Upon power up, the controller first checks
to determine if the motor is still spinning. This
”Hold For Resync” decision block will be dis-
cussed later.
Hold & wait
for decision
RunBrk = 0
RunBrk = 1
Hold for
”Align & Go”
Hold
for
”Resync”
Start
”Align & Go”
Align =
Seqncr.
Run
[Align
to
Phase
#
1]
Go
=
1
[Align
to
Phase
#
3]
O
u
t
E
n
a
=
0
O
u
t
E
n
a
=
0
O
u
t
E
n
a
=
0
Align =
0
Go =
0
Power
on
Reset
Align
=
1
RunBrk
=
1
OutEna
=
1
OutEna
=
0
RunBrk = 1
OutEna = 0
OutEna = 0
&
RunBrk = 0
Figure 5: Align+Go
L6238
9/35](https://image.slidesharecdn.com/l62831-230514150940-a716bb15/75/L6283-1-3-pdf-9-2048.jpg)