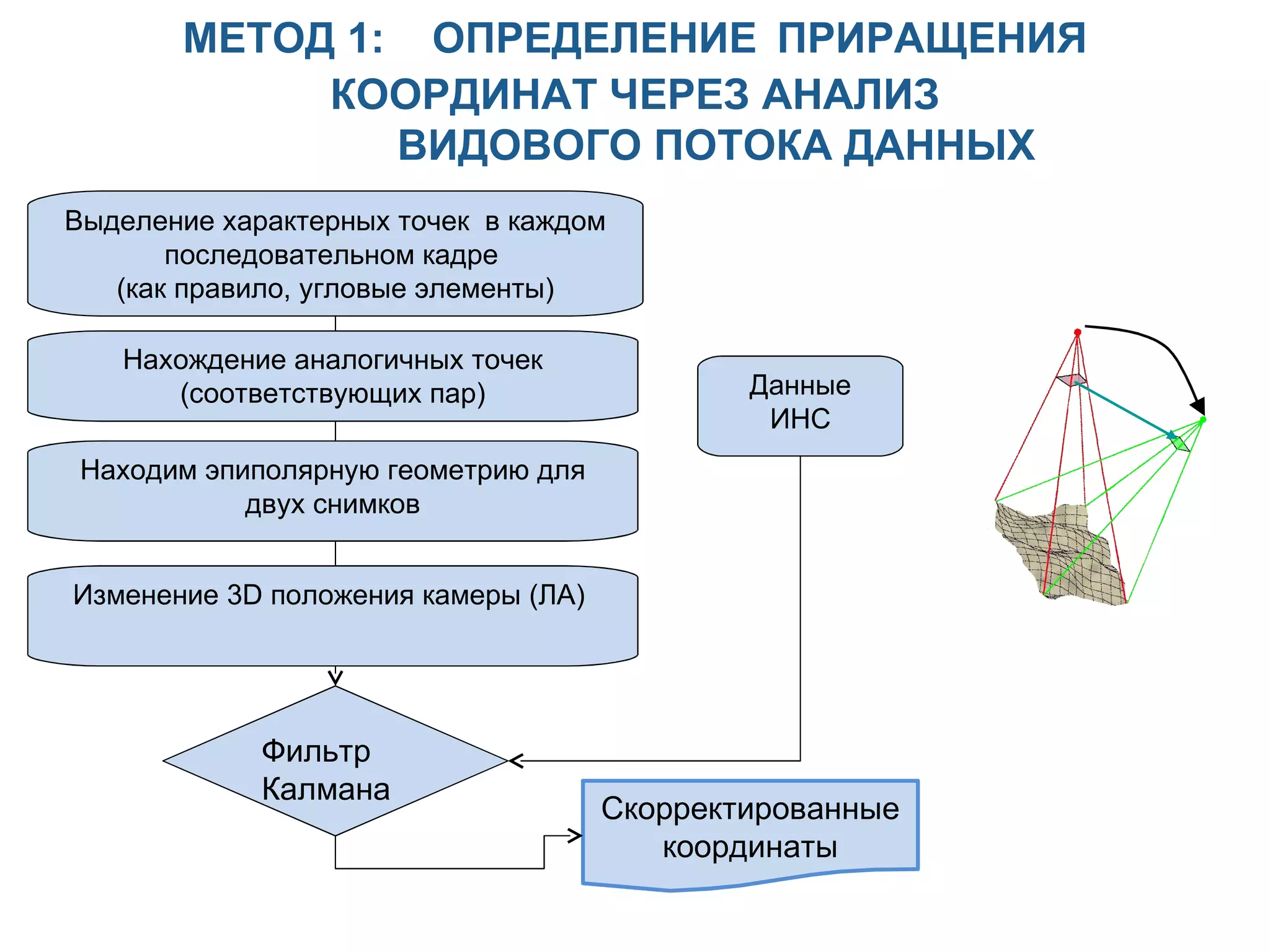
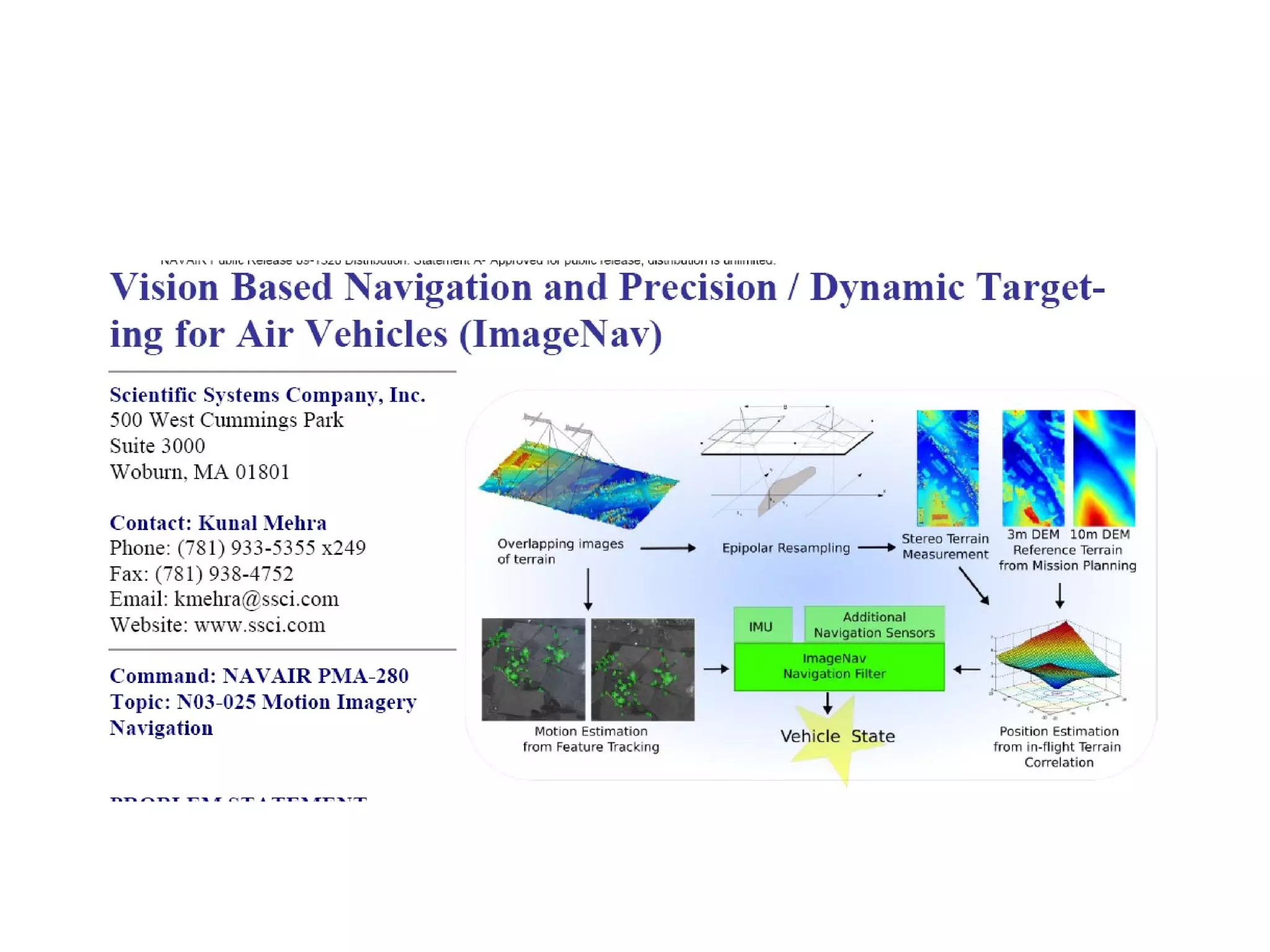
Документ описывает три метода видео-навигации, включая определение перемещения через анализ видового потока, использование цифровой модели рельефа и сравнение с архивными снимками для определения местоположения. Каждый метод имеет свои преимущества и ограничения, такие как чувствительность к ошибке и условия освещения. Основные аспекты методов включают применение фильтра Калмана и эпиполярной геометрии для улучшения точности навигации.