Download to read offline
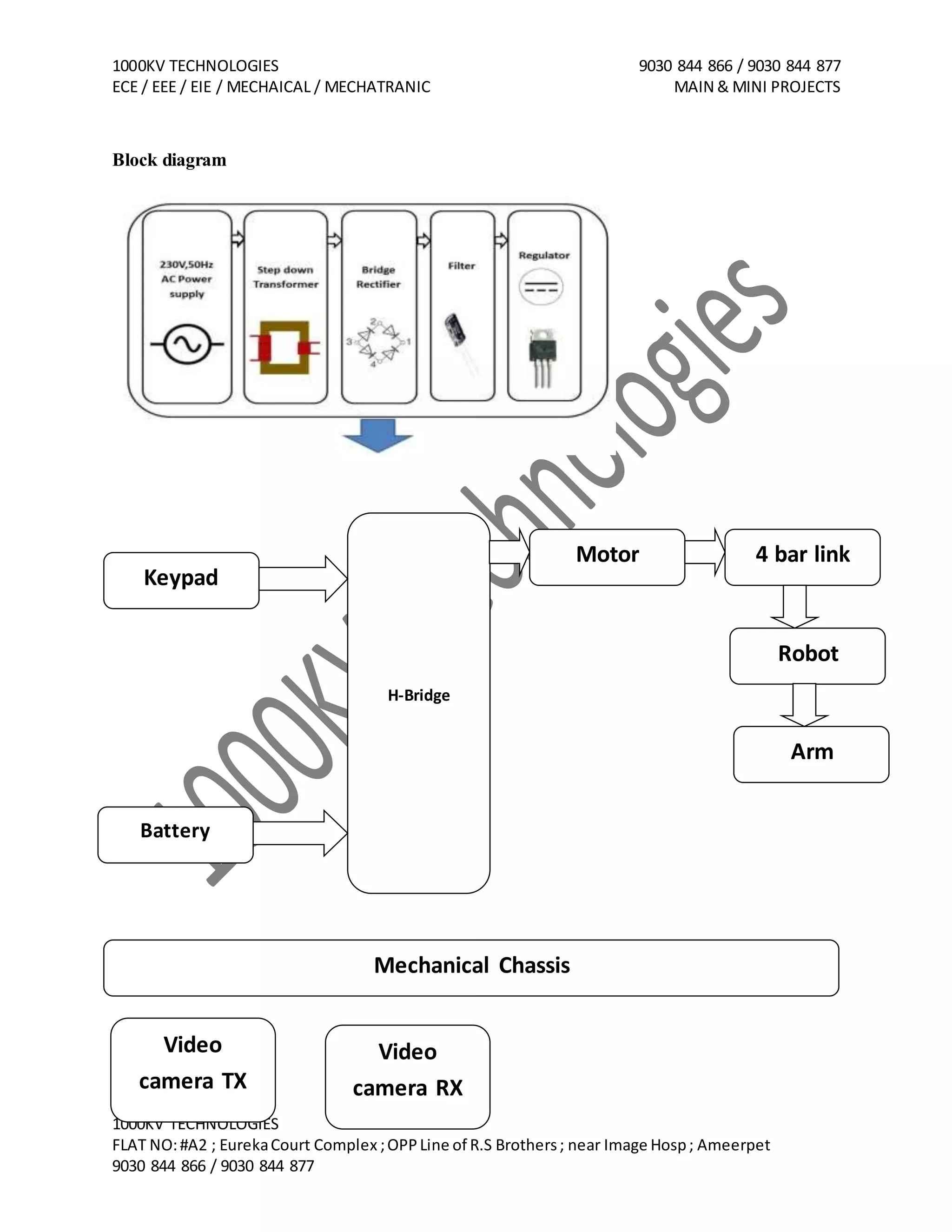
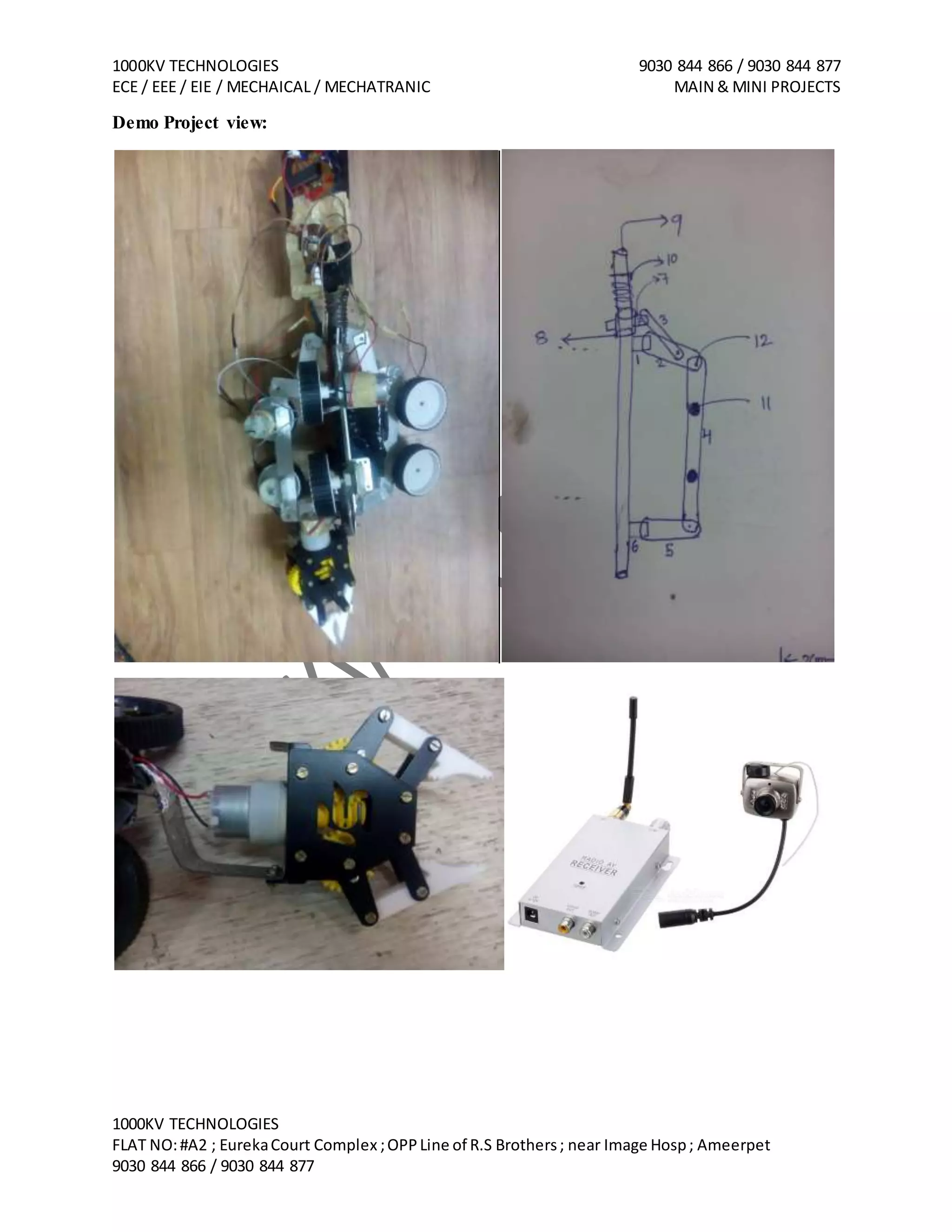

The document describes a project aimed at designing a robot capable of rescuing a child trapped in a borehole, utilizing a four-bar link mechanism and wireless camera for inspection. It operates via a keypad to control the robot's movements and functionalities, including picking and placing objects. The robot can also serve dual purposes as a cleaning and inspection machine for vertical pipes.



































































