Download to read offline



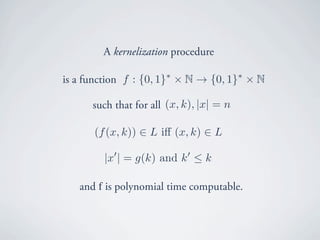


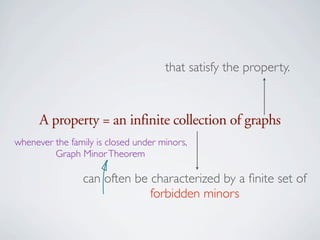




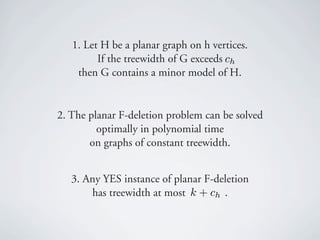

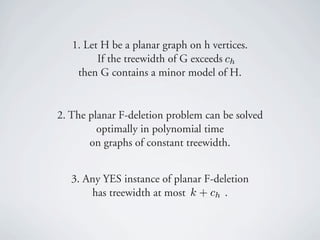

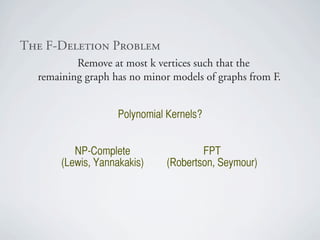


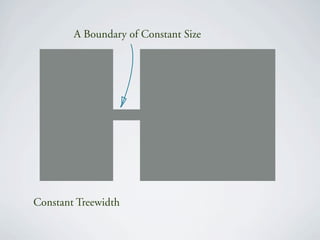





The document discusses kernelization for the F-deletion problem, where graphs in F are connected and at least one is planar. It is shown that the planar F-deletion problem admits a polynomial kernel whenever F contains a planar graph called the "onion" graph. Several other positive and negative results are also presented, including that planar F-deletion admits an approximation algorithm and a polynomial kernel on claw-free graphs. The document concludes by outlining the ingredients for showing that planar F-deletion admits a polynomial kernel.