Tiga kalimat ringkasan dokumen tersebut adalah:
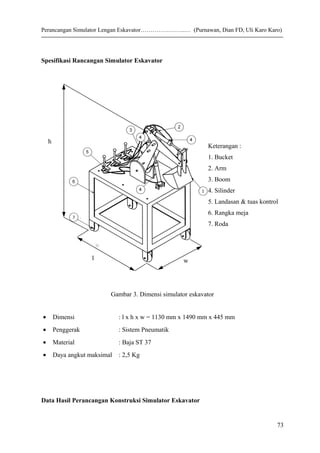
Dokumen tersebut membahas perancangan simulator lengan eskavator dengan sistem kontrol pneumatik untuk digunakan sebagai media pembelajaran. Simulator dirancang untuk mampu mengangkat beban 2,5 kg menggunakan tiga silinder udara. Hasil uji coba menunjukkan simulator mampu beroperasi sesuai dengan yang direncanakan.








![TORSI, Volume XI, No.1, Januari 2013
___. (2012). Excavator.[Online]. Tersedia: http://en.wikipedia.org/wiki/Excavator .[24
Januari 2012]
____.(____).Katalog SMC Pneumatic.[Online].Tersedia: http://content2.smce tech.com
/pdf/CJ5-CG5-B_EU.pdf.[3 Juni 2012]
Croser,Peter dan Ebel, Frank.(1999).Pneumatics Basic Level.Festo Didactict GmbH &
Co.:____.
Das, Braja M.(1988).Mekanika Tanah (Prinsip-Prinsip Rekayasa
Geoteknis).Erlangga:Jakarta.
Hasan, Ali. (2010). Alat Berat.[Online]. Tersedia: http://wwwalizyrocket.blog spot.com/.[24
Januari 2012]
Isdwiyanudi, Sugeng.Ir.(1996).Bahan mata kuliah elemen mesin Fakultas Teknik
UNJANI.Unjani:Bandung
Khurmi, R.S dan Gupta, J.K.(1982).A Text Book Of Machine Design.Rajendra Bavindra
Printers (Pvt)Ltd:New Delhi.
Racmanhadi, Ir.(1982). Alat-Alat Berat Dan Penggunaannya. Departemen pek erjaan umum
badan penerbit pekerjaan umum: Semarang
Singer.L.Ferdinand dan Pytel, Andrew.(1985).Kekuatan Bahan (Teori Kokoh-Strength Of
Materials).Erlangga:Jakarta
Siska,Ir, M.T.(1996).Pemindah Tanah Mekanik.:Bandung
Sugihartono, Drs. (1996).Dasar-Dasar Kontrol Pneumatik.Tarsito:Bandung.
Sularso,Ir,MSME dan Haruo Tahara,Prof.DR.(1983).”Pompa dan Kompresor Pemelihan,
Pemakaian dan Pemeliharaan”.Pradnya Paramita:Jakarta.
Suryani,Erma.(2006).Pemodelan & Simulasi.Graha Ilmu:Yogyakarta
Uno, Hamzah B,Prof.Dr.M.MPd.(2007).Model Pembelajaran Menciptakan Proses Belajar
Mengajar yang Efektif dan Kreatif.Bumi Aksara:Jakarta
White, Frank M.(1986). Mekanika Zalir (Fluid Mechanics).Erlangga:Jakarta
76](https://image.slidesharecdn.com/jurnal-150624032444-lva1-app6892/85/Jurnal-10-320.jpg)



![Perancangan pesawat angkat & angkut [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/perancanganpesawatangkatangkutautosaved-150823062211-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)











































![Modul Ajar KBC Al-Qur’an Hadis Kelas 9 MTs [MODULKELAS.COM]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkbcal-quranhadiskelas9mtsmodulkelas-260124161811-c72fa7d6-thumbnail.jpg?width=640&height=640&fit=bounds)

