(確認)これまでの IAM の問題点
•Group を現実の組織に則った構成にするとつらい
• 各 Group に同じ IAM Policy をコピペ・・・
• 例:CloudTrailで取得した監査ログが保存されたバケットに対する操作を禁止、など
• Policy の更新もコピペ・・・
• THE 刺身タンポポ
• IAM Policy と Group が 1 対 1 になるように設計すると、Group への User の Attach が複雑になる・・・
• Role に至ってはグルーピングするような機能が無い・・・
• Pathを駆使すれば何とかなると思いますが、ガチ勢じゃないとつらい
2015/2/22 5
6.
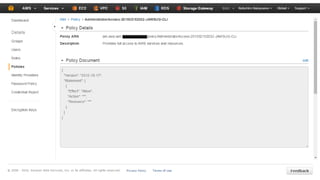
Managed Policyとは
• IAMPolicy を独立して定義できるようになりました
• これまでは User / Group / Role に従属するものとして定義する必要があった
• User / Group / Role にアタッチできる
• バージョン管理ができる(!)
• ロールバックができる(!!!)
• ただし、5 世代まで
• User / Group / Role に従属していたこれまでの Policy は Inline Policy として残る
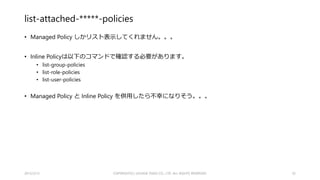
• (2015/2/22 追記) User / Group / Role にAttachできるManaged Policyは2つまで(?!)
• You can attach up to two managed policies to each principal entity.
• http://docs.aws.amazon.com/IAM/latest/UserGuide/managing-managed-policies-console.html#attach-
managed-policy-console
2015/2/22 6
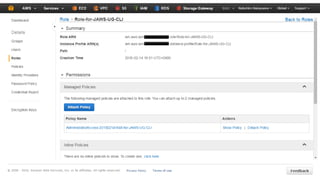
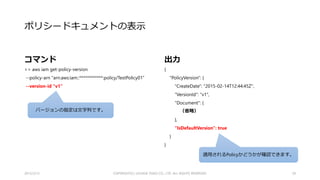
set-default-policy-version
• Description
• Setsthe specified version of the specified policy as the policy's default (operative) version.
• This action affects all users, groups, and roles that the policy is attached to. To list the users, groups,
and roles that the policy is attached to, use the list-entities-for-policy API.
• ロールバックも簡単!
• もちろん影響範囲を事前に確認しましょう。(list-entities-for-policy)
2015/2/22 35


![me.json
{
"name“ : "Nobuhiro Nakayama",
"favorite aws services“ : [
"Storage Gateway",
"Directory Service",
"IAM"
],
"certifications“ : [
"AWS Certified Solutions Architect-Associate",
"AWS Certified SysOps Administrator-Associate",
"Microsoft Certified Solutions Expert : Server Infrastructure",
"Microsoft Certified Solutions Expert : SharePoint"
]
}
2015/2/22 2](https://image.slidesharecdn.com/jawsug-cli12managedpolicy-150214081447-conversion-gate01/85/JAWSUG-CLI-12-Managed-Policy-2-320.jpg)

























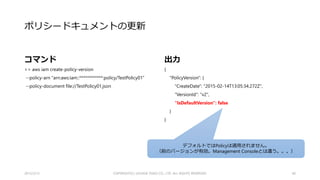


![適用先の一覧を表示
コマンド
>> aws iam list-entities-for-policy
--policy-arn "arn:aws:iam::************:policy/TestPolicy01"
出力
{
"PolicyGroups": [],
"PolicyUsers": [
{
"UserName": "TestUser01"
}
],
"PolicyRoles": [],
"IsTruncated": false
}
2015/2/22 44](https://image.slidesharecdn.com/jawsug-cli12managedpolicy-150214081447-conversion-gate01/85/JAWSUG-CLI-12-Managed-Policy-44-320.jpg)

























![[AWSマイスターシリーズ]Identity and Access Management (IAM)](https://cdn.slidesharecdn.com/ss_thumbnails/20130716aws-meister-regenerate-iam-public-130728224341-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Modern Cloud Day Tokyo 2019] Oracle Cloud Infrastructure 基本サービス入門(2) - ユーザー管...](https://cdn.slidesharecdn.com/ss_thumbnails/mcd19d-2-190822001051-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Cloud OnAir] Talks by DevRel Vol.2 セキュリティ 2020年8月6日 放送](https://cdn.slidesharecdn.com/ss_thumbnails/aaaa-200806090441-thumbnail.jpg?width=640&height=640&fit=bounds)



















