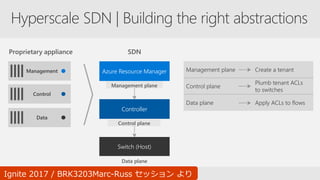
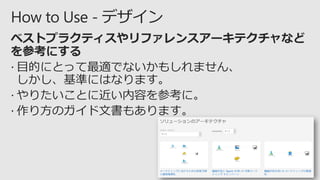
Management plane Createa tenant
Control plane
Plumb tenant ACLs
to switches
Data plane Apply ACLs to flows
Azure Resource Manager
Controller
Switch (Host)
Management plane
Data plane
SDN
Control plane
Proprietary appliance
Management
Control
Data
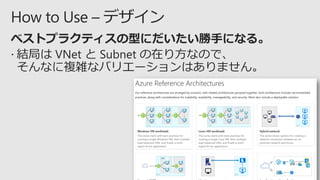
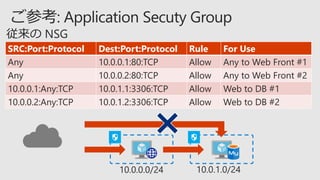
SRC:Port:Protocol Dest:Port:Protocol RuleFor Use
Any 10.0.0.1:80:TCP Allow Any to Web Front #1
Any 10.0.0.2:80:TCP Allow Any to Web Front #2
10.0.0.1:Any:TCP 10.0.1.1:3306:TCP Allow Web to DB #1
10.0.0.2:Any:TCP 10.0.1.2:3306:TCP Allow Web to DB #2
10.0.0.0/24 10.0.1.0/24
40.
SRC:Port:Protocol Dest:Port:Protocol RuleFor Use
Any [Web Servers] Allow Any to Web Servers
[Web Servers] [MySQL Servers] Allow Web to DBs
Web Servers
10.0.0.1 (nic)
10.0.0.2 (nic)
MySQL Servers
10.0.1.1 (nic)
10.0.1.2 (nic)
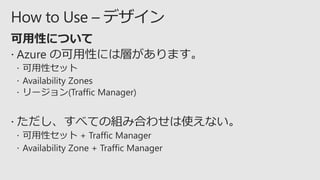
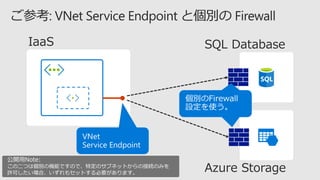
公開用Note:
ASGのいいところはSubnetを分
けずとも、特定のグループ向
けのフィルタを作成しやすく、
また、VMのNIC作成時にグ
ループとして割り当てるので、
NSGを編集しなくていい、とい
うところですかね。
VM作成したときからセキュア、
という状態にできます。ド
キュメントにはすでにチュー
トリアルがありますので、ぜ
ひやってみてください。


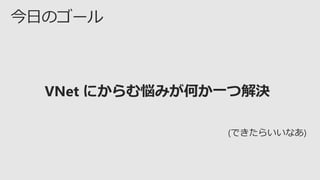










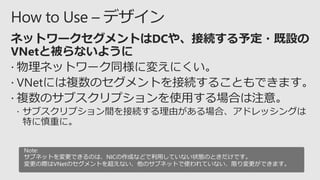
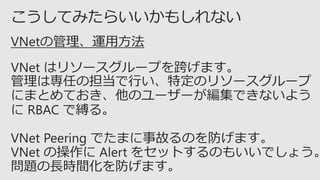
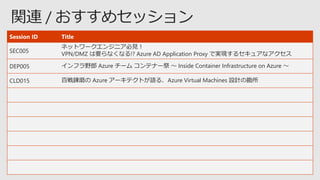
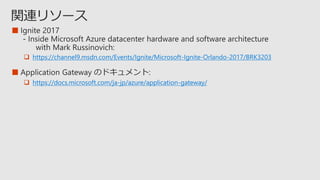
![SRC:Port:Protocol Dest:Port:Protocol Rule For Use
Any [Web Servers] Allow Any to Web Servers
[Web Servers] [MySQL Servers] Allow Web to DBs
Web Servers
10.0.0.1 (nic)
10.0.0.2 (nic)
MySQL Servers
10.0.1.1 (nic)
10.0.1.2 (nic)
公開用Note:
ASGのいいところはSubnetを分
けずとも、特定のグループ向
けのフィルタを作成しやすく、
また、VMのNIC作成時にグ
ループとして割り当てるので、
NSGを編集しなくていい、とい
うところですかね。
VM作成したときからセキュア、
という状態にできます。ド
キュメントにはすでにチュー
トリアルがありますので、ぜ
ひやってみてください。](https://image.slidesharecdn.com/techsummit2017pdfcld008-171115032110/85/Japan-Tech-summit-2017-CLD-008-40-320.jpg)



![[Japan Tech summit 2017] CLD 008](https://image.slidesharecdn.com/techsummit2017pdfcld008-171115032110/85/Japan-Tech-summit-2017-CLD-008-61-320.jpg)
![[Japan Tech summit 2017] CLD 008](https://image.slidesharecdn.com/techsummit2017pdfcld008-171115032110/85/Japan-Tech-summit-2017-CLD-008-62-320.jpg)
![[Japan Tech summit 2017] SEC 009](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec009-171116035457-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep007-171116035105-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DAL 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdal003-171115033147-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld006-171115032103-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 014](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld014-171115032121-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld007-171115032107-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld001-171115031947-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld003-171115032051-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 008](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep008-171116035107-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 002](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld002-171115032025-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 019](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld019-171115032130-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 009](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep009-171116035108-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 016](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld016-171115032128-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec005-171116035502-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] APP 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfapp006-171127040530-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 009](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd009-171115033453-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep005-171116035106-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] APP 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfapp003-171115031648-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 011](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld011-171115032116-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 008](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd008-171115033457-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DAL 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdal001-171115033146-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DAL 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdal006-171115033148-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 015](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld015-171115032124-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DAL 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdal005-171127040522-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd007-171115033456-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 011](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec011-171127040529-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] APP 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfapp001-171115031546-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] CLD 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfcld005-171115032102-thumbnail.jpg?width=640&height=640&fit=bounds)



![[Azure Deep Dive] Azure ネットワーキングを理解しよう!](https://cdn.slidesharecdn.com/ss_thumbnails/20151004madazurenetworking-151216085343-thumbnail.jpg?width=640&height=640&fit=bounds)
















![[Japan Tech summit 2017] SEC 010](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec010-171127040527-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] MAI 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfmai007-171127040526-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd005-171116071452-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 012](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec012-171116071451-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 011](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd011-171116071451-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] MAI 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfmai005-171116071451-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SPL 005](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfspl005-171116035846-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SPL 004](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfspl004-171116035845-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SPL 002](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfspl002-171116035845-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 004](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec004-171116035501-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec003-171116035500-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] PRD 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfprd001-171116035459-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] MAI 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfmai003-171116035458-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 007](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec007-171116035457-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec006-171116035456-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] SEC 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfsec001-171116035455-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 02](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep002-171116035109-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep001-171116035108-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 006](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep006-171116035106-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Japan Tech summit 2017] DEP 003](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfdep003-171116035105-thumbnail.jpg?width=640&height=640&fit=bounds)