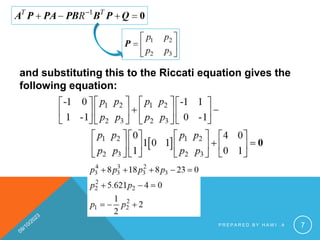
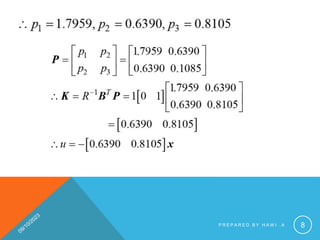
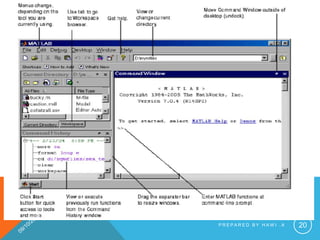
The document discusses optimal control and linear quadratic control (LQR). It introduces LQR as a method for optimal control where the system dynamics are linear and the cost is quadratic. It explains that LQR provides an algorithm to optimize the controller by finding the feedback gain matrix K. The document provides steps to solve LQR problems using MATLAB and finds the optimal regulator to minimize a cost function for a sample linear time-invariant system.
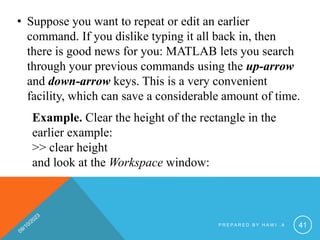
![OPTIMAL REGULATOR
Step 2: Find the feedback gain matrix K.
Step 1: Find the solution P of the Riccatti equation
from
A, B, Q, and R
% MATLAB command
[K,P,E]= lqr(A,B,Q,R) % E are the eigenvalues of
(A-BK)
P R E P A R E D B Y H A W I . A 5](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-5-320.jpg)
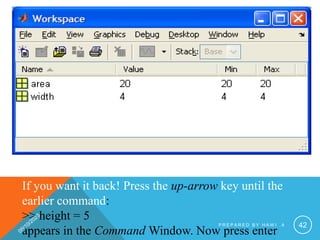
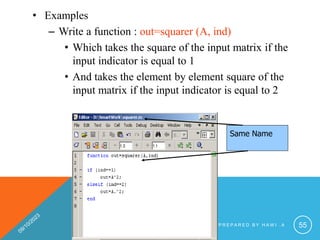
![MATLAB PROGRAM
A= [-1 1;0 -1]; B= [0;1]; C= [1 0]; D= 0;
Q= [4 0;0 1]; R= 1;
[K,P,E]= lqr(A,B,Q,R)
AA= A-B*K; BB= [0;0]; CC= eye(2); DD= D;
t= 0:0.02:5;
u= zeros(size(t));
x0=[1;1];
y= lsim(AA,BB,CC,DD,u,t,x0);
plot(t,y(:,1),t,y(:,2))
P R E P A R E D B Y H A W I . A 9](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-9-320.jpg)

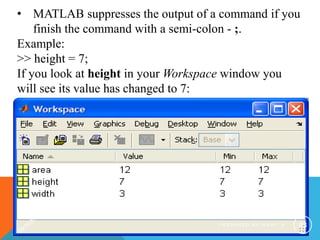
![Writing User Defined Functions
• Functions are m-files which can be executed by
specifying some inputs and supply some desired
outputs.
• The code telling the Matlab that an m-file is actually a
function is
• You should write this command at the beginning of
the m-file and you should save the m-file with a file
name same as the function name
function out1=functionname(in1)
function out1=functionname(in1,in2,in3)
function [out1,out2]=functionname(in1,in2)
P R E P A R E D B Y H A W I . A 54](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-54-320.jpg)

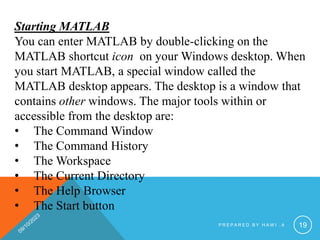
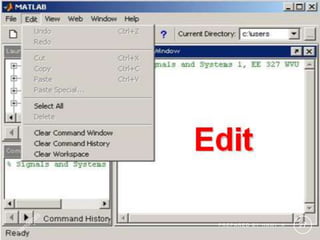
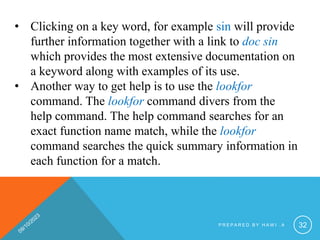
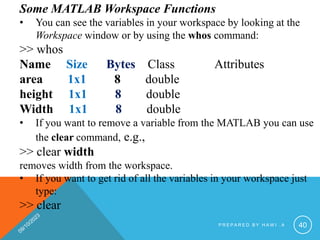
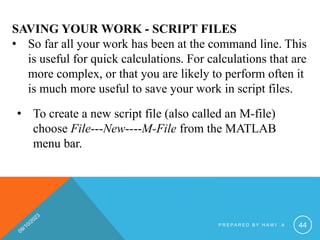
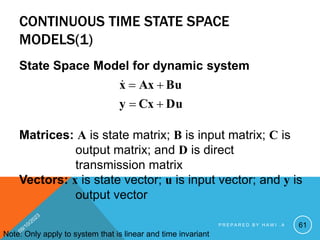
![CONTINUOUS TIME TRANSFER
FUNCTION(1)
Function: Use tf function create transfer
function of following form:
Example
2
3
1
2
)
( 2
s
s
s
s
H
>>num = [2 1];
>>den = [1 3 2];
>>H=tf(num,den)
Transfer function:
2 s + 1
-------------
s^2 + 3 s + 2
Matlab Output
58
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-58-320.jpg)
![CONTINUOUS TIME TRANSFER
FUNCTION(2)
Include delay to continuous time Transfer
Function
Example
2
3
1
2
)
( 2
2
s
s
s
e
s
H s
Transfer function:
2 s + 1
exp(-2*s) * -------------
s^2 + 3 s + 2
>>num = [2 1];
>>den = [1 3 2];
>>H=tf(num,den,’inputdelay’,2)
Matlab Output
59
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-59-320.jpg)
![CONTINUOUS TIME TRANSFER
FUNCTION(3)
Function: Use zpk function to create transfer
function of following form:
Example
2
1
5
.
0
2
2
3
1
2
)
( 2
s
s
s
s
s
s
s
H
>>num = [-0.5];
>>den = [-1 -2];
>>k = 2;
>>H=zpk(num,den,k)
Zero/pole/gain:
2 (s+0.5)
-----------
(s+1) (s+2)
Matlab Output
60
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-60-320.jpg)
![CONTINUOUS TIME STATE SPACE
MODELS(2)
Function: Use ss function creates state
space models. For example:
0
1
0
3
0
2
5
1
0
2
1
D
C
B
A
x
x
x
>>A = [0 1;-5 -2];
>>B = [0;3];
>>C = [0 1];
>>D = [0];
>>sys=ss(A,B,C,D)
a =
x1 x2
x1 0 1
x2 -5 -2
Matlab Output
b =
u1
x1 0
x2 3
c =
x1 x2
y1 0 1
d =
u1
y1 0 62
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-62-320.jpg)
![CONVERSION BETWEEN DIFFERENT
MODELS
Converting From Converting to Matlab function
Transfer Function Zero-pole-gain [z,p,k]=tf2zp(num,den)
Transfer Function State Space [A,B,C,D]=tf2ss(num,den)
Zero-pole-gain Transfer Function [num,den]=zp2tf(z,p,k)
Zero-pole-gain State Space [A,B,C,D]=zp2ss(z,p,k)
State Space Transfer Function [num,den]=ss2tf(A,B,C,D)
State Space Zero-pole-gain [z,p,k]=ss2zp(A,B,C,D)
63
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-63-320.jpg)
![DISCRETE TIME TRANSFER FUNCTION(1)
Function: Use tf function create transfer
function of following form:
Example: with sampling time
0.4
2
3
1
2
)
( 2
z
z
z
z
H
>>num = [2 1];
>>den = [1 3 2];
>>Ts=0.4;
>>H=tf(num,den,Ts)
Transfer function:
2 z + 1
-------------
z^2 + 3 z + 2
Sampling time: 0.4
Matlab Output
64
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-64-320.jpg)
![DISCRETE TIME TRANSFER FUNCTION(2)
Function: Use zpk function to create transfer
function of following form:
Example: with sampling time 0.4
2
1
5
.
0
2
)
(
z
z
z
z
H
>>num = [-0.5];
>>den = [-1 -2];
>>k = 2;
>>Ts=0.4;
>>H=zpk(num,den,k,Ts)
Zero/pole/gain:
2 (z+0.5)
-----------
(z+1) (z+2)
Sampling time: 0.4
Matlab Output
65
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-65-320.jpg)
![DISCRETE TIME STATE SPACE MODELS(1)
State Space Model for dynamic system
]
[
]
[
]
[
]
[
]
[
]
1
[
n
n
n
n
n
n
Du
Cx
y
Bu
Ax
x
Matrices: A is state matrix; B is input matrix; C is
output matrix; and D is direct
transmission matrix
Vectors: x is state vector; u is input vector; and y is
output vector
n is the discrete-time or time-index
Note: Only apply to system that is linear and time invariant 66
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-66-320.jpg)
![DISCRETE TIME STATE SPACE MODELS(2)
Function: Use ss function creates state space
models. For example:
0
1
0
3
0
2
5
1
0
]
[
]
[
]
[
2
1
D
C
B
A
x
n
x
n
x
n
>>A = [0 1;-5 -2];
>>B = [0;3];
>>C = [0 1];
>>D = [0];
>>Ts= [0.4];
>>sys=ss(A,B,C,D,Ts)
Transfer function:
2 z + 1
-------------
z^2 + 3 z + 2
Sampling time: 0.4
Matlab Output
a =
x1 x2
x1 0 1
x2 -5 -2
Matlab Output
b =
u1
x1 0
x2 3
c =
x1 x2
y1 0 1
d =
u1
y1 0
Sampling time: 0.4 67
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-67-320.jpg)
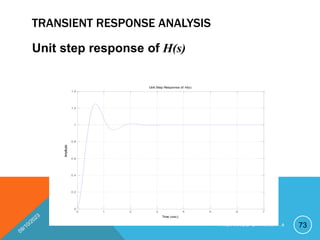
![TRANSIENT RESPONSE ANALYSIS
Unit step response of the transfer function
system
Consider the system:
25
4
25
2
s
s
s
H
%*****Numerator & Denominator of H(s)
>>num = [0 0 25];den = [1 4 25];
%*****Specify the computing time
>>t=0:0.1:7;
>>step(num,den,t)
%*****Add grid & title of plot
>>grid
>>title(‘Unit Step Response of H(s)’) 72
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-72-320.jpg)
![TRANSIENT RESPONSE ANALYSIS
Alternative way to generate Unit step response of the
transfer function, H(s)
If step input is , then step response is
generated with the following command:
%*****Numerator & Denominator of H(s)
>>num = [0 0 25];den = [1 4 25];
%*****Create Model
>>H=tf(num,den);
>>step(H)
>>step(10*H)
)
(
10 t
u
74
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-74-320.jpg)
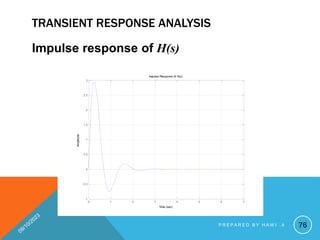
![TRANSIENT RESPONSE ANALYSIS
Impulse response of the transfer function
system
Consider the system:
25
4
25
2
s
s
s
H
%*****Numerator & Denominator of H(s)
>>num = [0 0 25];den = [1 4 25];
%*****Specify the computing time
>>t=0:0.1:7;
>>impulse(num,den,t)
%*****Add grid & title of plot
>>grid
>>title(‘Impulse Response of H(s)’) 75
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-75-320.jpg)
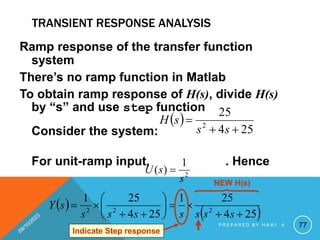
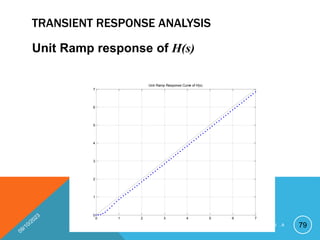
![TRANSIENT RESPONSE ANALYSIS
Example: Matlab code for Unit Ramp Response
%*****Numerator & Denominator of NEW H(s)
>>num = [0 0 0 25];den = [1 4 25 0];
%*****Specify the computing time
>>t=0:0.1:7;
>>y=step(num,den,t);
%*****Plot input & the ramp response curve
>>plot(t,y,’.’,t,t,’b-’)
%*****Add grid & title of plot
>>grid
>>title(‘Unit Ramp Response Curve of H(s)’)
78
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-78-320.jpg)
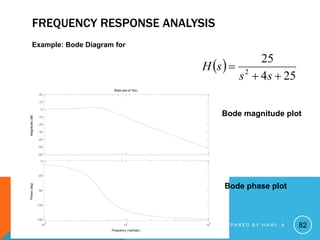
![FREQUENCY RESPONSE ANALYSIS
Bode Diagram Representation of Frequency
Response
Consists of two graphs:
Log-magnitude plot of the transfer function
Phase-angle plot (degree) of the transfer function
Matlab function is known as ‘bode’
%*****Numerator & Denominator of H(s)
>>num = [0 0 25];den = [1 4 25];
%*****Use ‘bode’ function
>>bode(num,den)
%*****Add title of plot
>>title(‘Bode plot of H(s)’)
81
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-81-320.jpg)
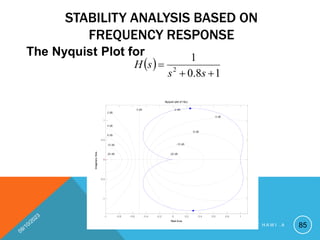
![STABILITY ANALYSIS BASED ON
FREQUENCY RESPONSE
Example: Matlab code to draw a Nyquist
Plot
Consider the system
1
8
.
0
1
2
s
s
s
H
%*****Numerator & Denominator of H(s)
>>num = [0 0 1];
>>den = [1 0.8 1];
%*****Draw Nyquist Plot
>>nyquist(num,den)
%*****Add grid & title of plot
>>grid
>>title(‘Nyquist Plot of H(s)’) 84
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-84-320.jpg)
![86
Extra: partial fraction expansion
num=[2 3 2];
den=[1 3 2];
[r,p,k] = residue(num,den)
r =
-4
1
p =
-2
-1
k =
2
Answer:
)
1
(
1
)
2
(
4
2
)
(
)
(
)
1
(
)
1
(
)
(
)
(
0
s
s
s
n
p
s
n
r
p
s
r
s
k
s
G
2
3
2
3
2
)
( 2
2
s
s
s
s
s
G
Given:
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-86-320.jpg)
![%Define the transfer function of a plant
G=tf([4 3],[1 6 5])
%Get data from the transfer function
[n,d]=tfdata(G,'v')
[p,z,k]=zpkdata(G,'v')
[a,b,c,d]=ssdata(G)
%Check the controllability and observability of the
system
ro=rank(obsv(a,c))
rc=rank(ctrb(a,b))
%find the eigenvalues of the system
damp(a)
%multiply the transfer function with another
transfer function
T=series(G,zpk([-1],[-10 -2j +2j],5))
%plot the poles and zeros of the new system
iopzmap(T)
%find the bandwidth of the new
system
wb=bandwidth(T)
%plot the step response
step(T)
%plot the rootlocus
rlocus(T)
%obtain the bode plots
bode(T)
margin(T)
%use the LTI viewer
ltiview({'step';'bode';'nyquist'},T)
%start the SISO tool
sisotool(T)
87
M-File Example
P R E P A R E D B Y H A W I . A](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-87-320.jpg)

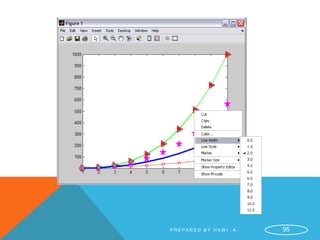
![More detailed plot options can be specified
through the use of property:value pairs
Plot(x,y,’o-’,’property’,value)
‘property’ is always a string naming the propery, value may
be a number, array, or string, depending on the property
type:
‘color’ : [R G B] - color (american spelling!) is specified with a
[red green blue] value array, each in range 0-1.
[1 0 0] – pure red
[1 0. 0.5 0] – orange
P R E P A R E D B Y H A W I . A 92](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-92-320.jpg)
![‘linewidth’ : specified as a single number. Default = 0.5
‘linestyle’ : any of line type strings - ‘-’,’:’,etc
‘marker’ : any of marker strings – ‘v’, ’o’, etc
‘markersize’ : number, default = 6
‘markeredgecolor’ : color string ‘r’, ‘g’, or [R G B] value for
the line defining edge of marker
‘markerfacecolor’: color string or [R G B] for inside of
marker (can be different from edge)
Can add any number of property:value pairs to a
plot command:
>> Plot(x,y,’prop1’,value1,’prop2’,value2,..)
P R E P A R E D B Y H A W I . A 93](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-93-320.jpg)
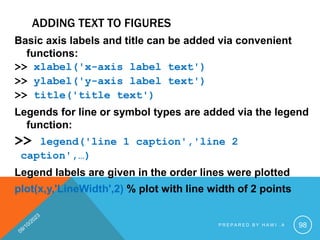
![% For example
t= 0:0.02:8;
y1= exp(-t).*sin(t); y2= exp(-0.5*t).*cos(t);
plot(t,y1,'k',t,y2,'r:','linewidth',2)
xlabel('t'), ylabel('y1 & y2')
legend('y1','y2','Location','NorthEast')
axis([0 8 -0.5 1])
P R E P A R E D B Y H A W I . A 99](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-99-320.jpg)
![% For example
t= linspace(-pi,pi,200)+eps;
x= sin(t); y= cos(t);
z= zeros(size(x));
plot3(x,y,z,'r','linewidth',2)
hold on
z= abs(sin(10*t)./(10*t));
plot3(x,y,z,'b','linewidth',3)
axis([-1.2 1.2 -1.2 1.2 -0.5 2])
axis off, hold off
>> x= 1:3; y= -1:1;
>> [X,Y]=
meshgrid(x,y)
>> Z= X.^2+Y.^2
P R E P A R E D B Y H A W I . A 101](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-101-320.jpg)

![SYSTEM PERFORMANCE:
ns= 4;
ds= [1 2 4];
t= 0:0.01:10;
y= step(ns,ds,t);
plot(t,y,'linewidth',
2)
stepinfo(y,t,1)
>>RiseTime: 0.8188
>>SettlingTime: 4.0382
>>SettlingMin: 0.9054
>>SettlingMax: 1.1630
>>Overshoot: 16.3029
>>Undershoot: 0
>>Peak: 1.1630
>>PeakTime: 1.8100
For example, consider a TF
P R E P A R E D B Y H A W I . A 103](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-103-320.jpg)
![Controllability and observability
>> A= [0 1;0 0]; B= [1;0]; C= [1 0];
>> U= ctrb(A,B); % Controllability
matrix
>> ru= rank(U) % Rank
>> V= obsv(A,C); % Observability
matrix
>> rv= rank(V) % Rank
P R E P A R E D B Y H A W I . A 104](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-104-320.jpg)
![ESTIMATOR/OBSERVER DESIGN
A= [0 1 0;0 -1 1;0 0 0]; B= [0;0;1]; C=[1 0
0];
AA= [A;C];
AA= [AA zeros(4,1)];
BB= [B;0];
PC= [-2+2j, -2-2j, -1, -2];% pole
K= acker(AA,BB,PC)
PO= [-3+2j, -3-2j, -4]; pole of observer
AT= A'; CT= C'; L= acker(AT, CT, PO);
L= L'
P R E P A R E D B Y H A W I . A 105](https://image.slidesharecdn.com/introductiontomatlablecture-231009092358-886ae58d/85/Introduction_to_Matlab_lecture-pptx-105-320.jpg)