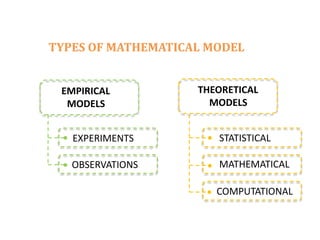
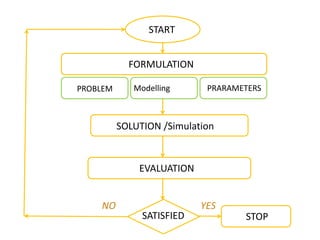
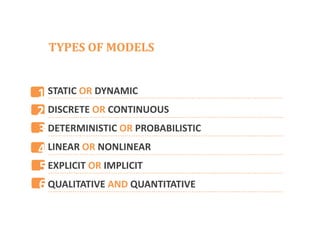
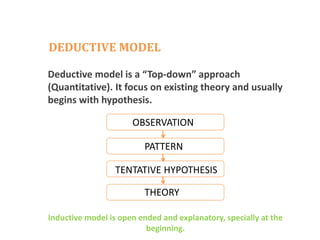
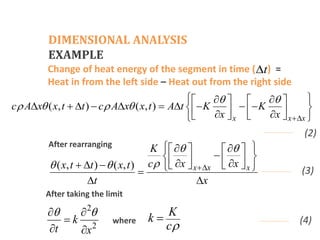
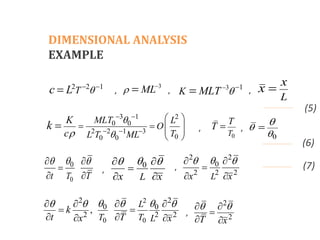
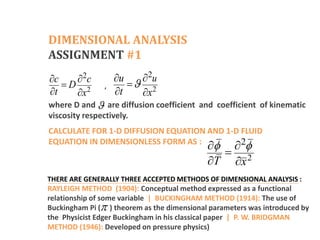
The document discusses the importance and application of mathematical modeling across various scientific fields, emphasizing its role in representing real-world problems through simplified mathematical forms. It outlines various types of mathematical models, including empirical, theoretical, deterministic, and probabilistic models, as well as the processes involved in model development and evaluation. The presentation also touches upon dimensional analysis and specific examples of its application in heat transfer problems.