Download as PDF, PPTX


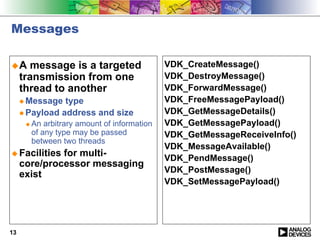

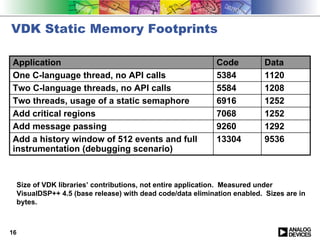
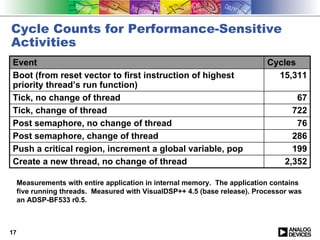

The VisualDSP++ kernel (VDK) is a small, robust kernel bundled with VisualDSP++ for applications with light-weight OS requirements. It supports threads, prioritization, semaphores, messaging, and critical regions. The VDK has small code and data footprints and fast performance for common operations like thread switching. It is fully integrated into VisualDSP++ for configuring, debugging, and developing applications.












![Understanding Oracle RAC 12c Internals OOW13 [CON8806]](https://cdn.slidesharecdn.com/ss_thumbnails/understandingoraclerac12cinternalsoow13con8806-131001010807-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)