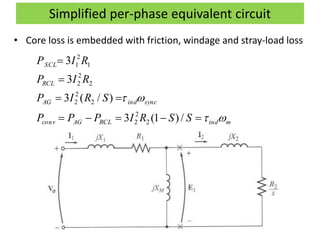
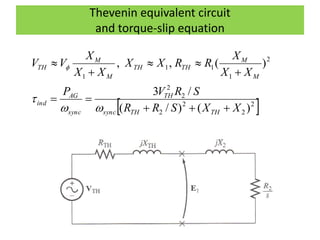
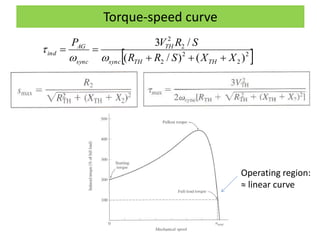
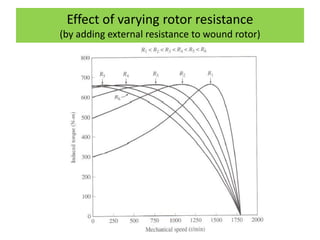
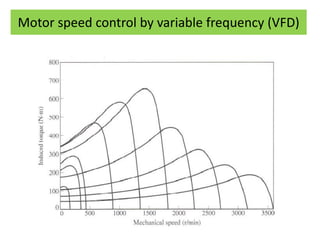
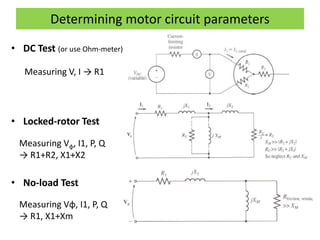
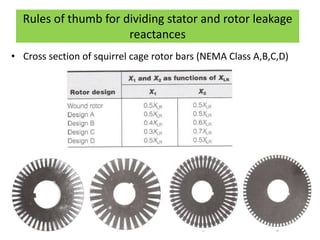
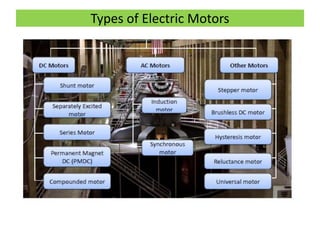
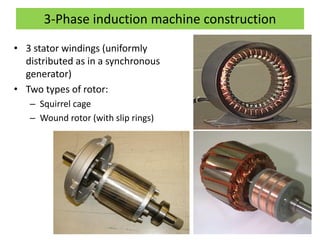
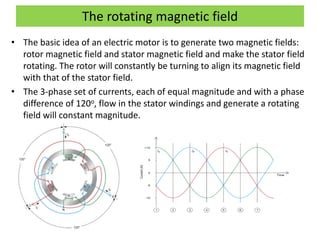
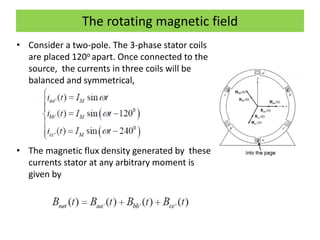
This document discusses 3-phase induction motors. It describes the construction of 3-phase induction motors, including their stator windings and two types of rotors: squirrel cage and wound rotor. It explains how the rotating magnetic field is generated by the 3-phase currents in the stator windings, causing the rotor to turn. Equivalent circuits are presented to model the motor, including per-phase and Thevenin equivalent circuits. The torque-speed curve and effect of varying rotor resistance are described. Methods for determining motor parameters from tests are provided.

![Power flow diagram
]/)1([3
3
)/(3
/3
3
2
2
2
2
2
2
2
2
2
2
1
1
2
1
SSRIPPP
RIP
SRIP
REp
RIP
RCLAGconv
RCL
AG
Ccore
SCL
](https://image.slidesharecdn.com/inductionmotors-200926110120/85/Induction-motors-17-320.jpg)