Download to read offline
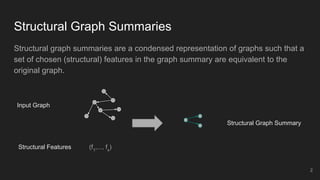
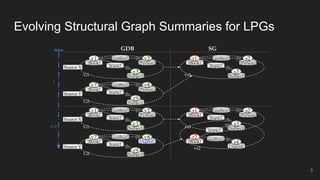
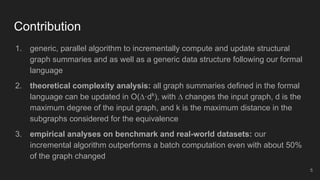
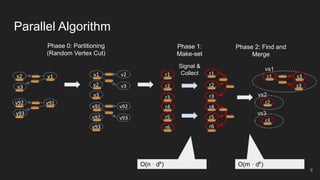

This document presents an incremental and parallel algorithm for computing structural graph summaries of evolving graphs. The algorithm incrementally updates graph summaries when the input graph changes, which is often faster than recomputing from scratch. The algorithm partitions the graph and computes summaries in parallel. Experimental results on real-world and benchmark graphs show the incremental algorithm outperforms batch computation even when 50% of the graph changes. The algorithm runs in linear time with respect to graph changes and degree.