Download to read offline
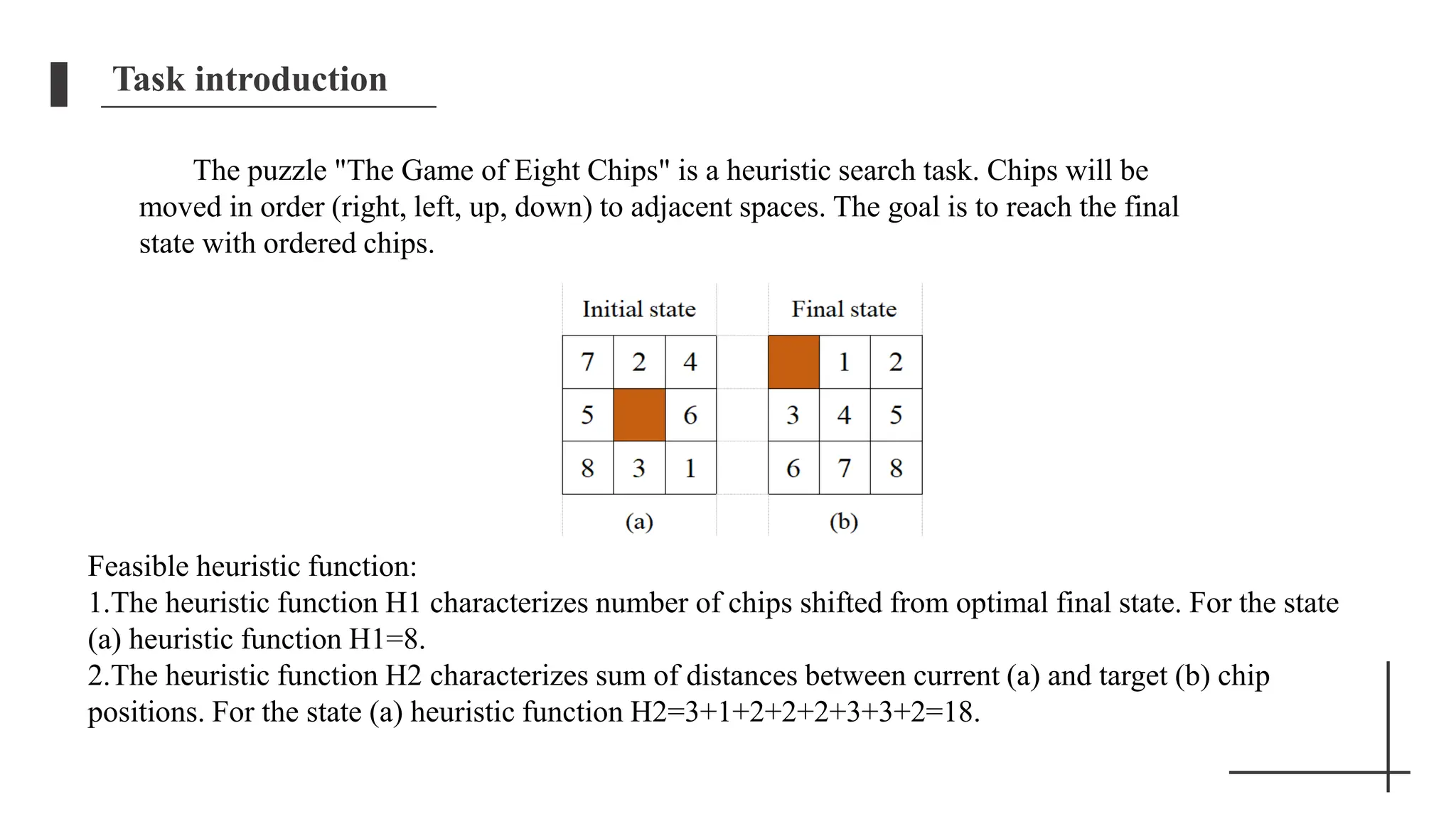
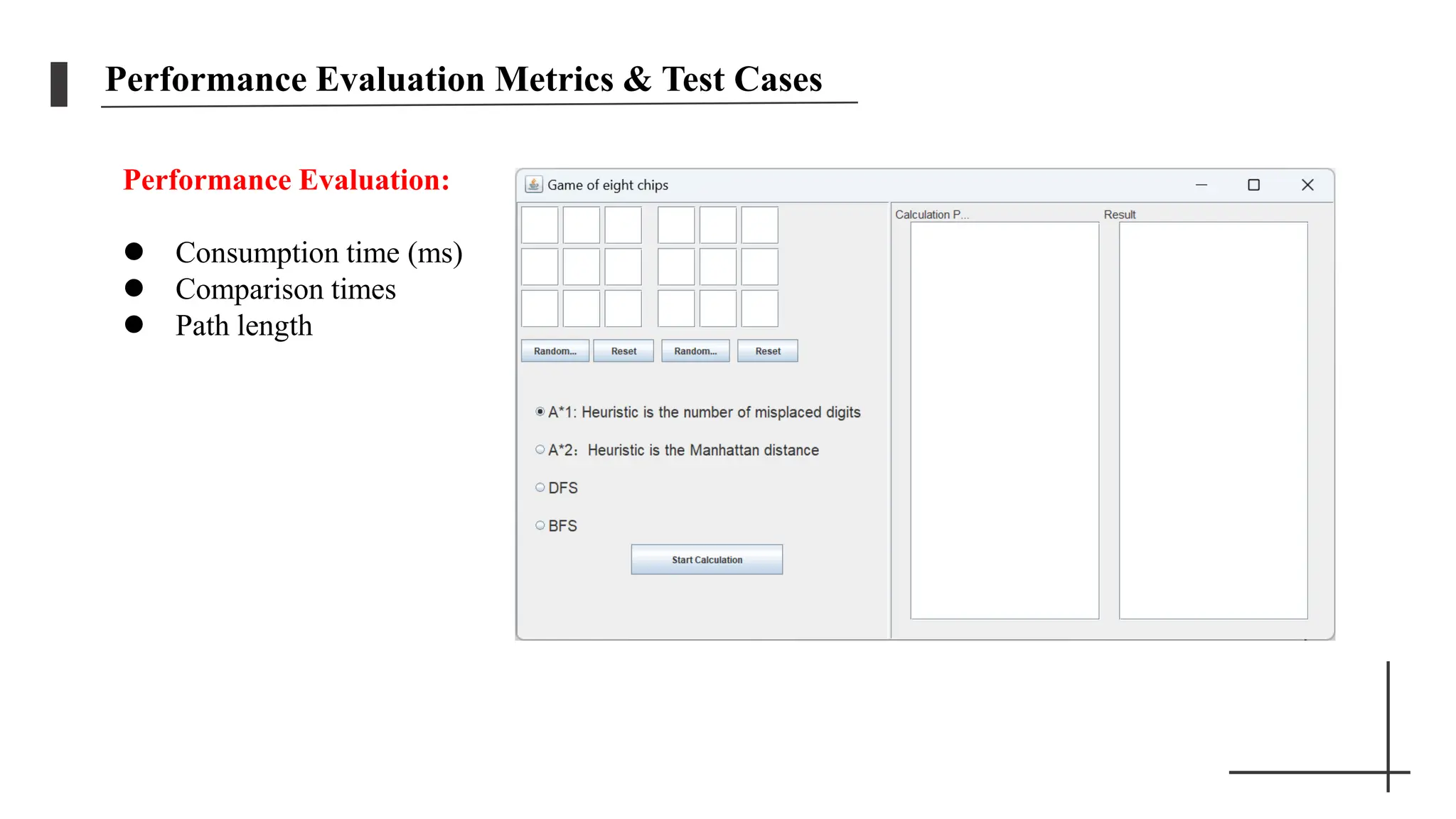
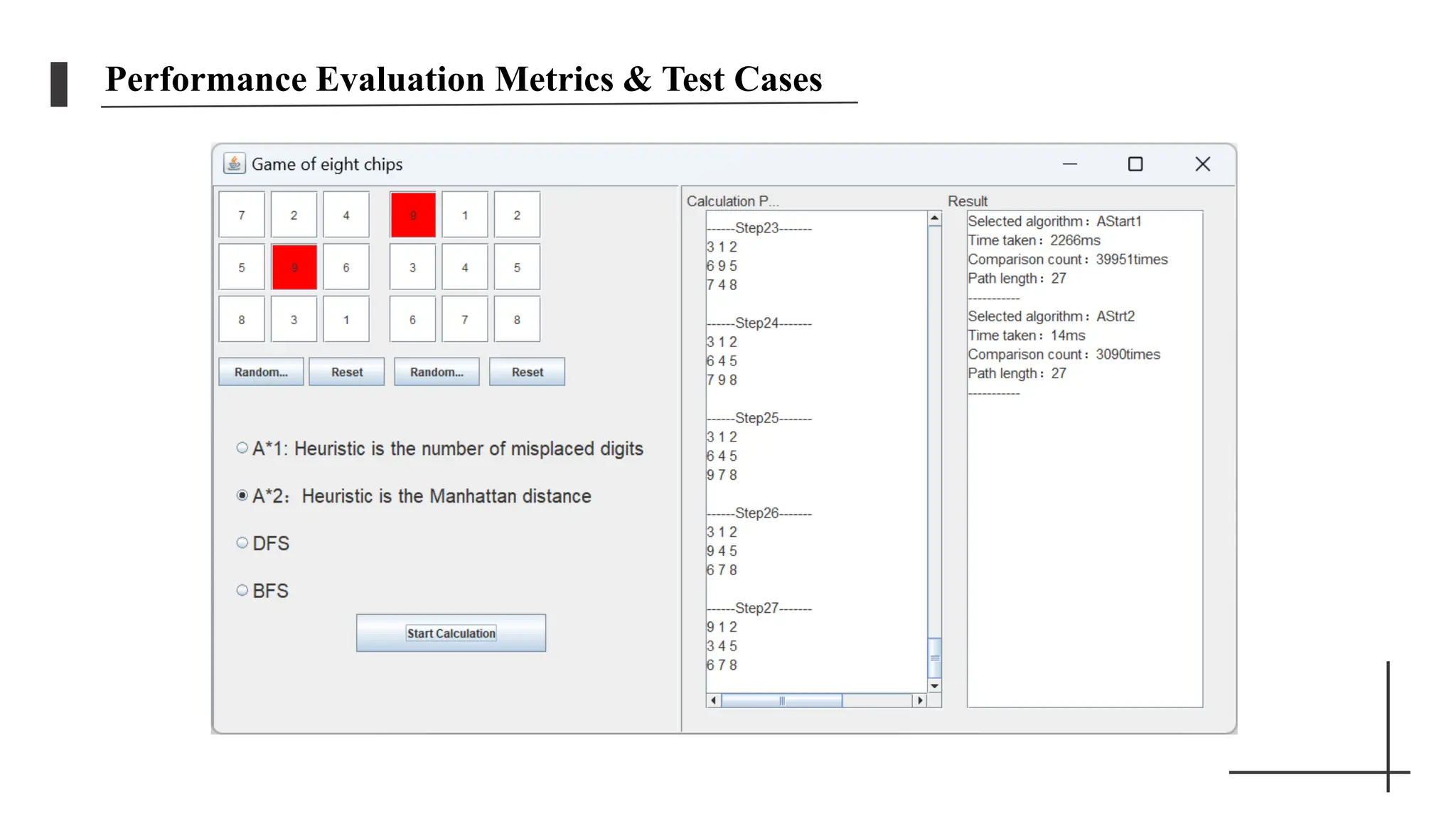
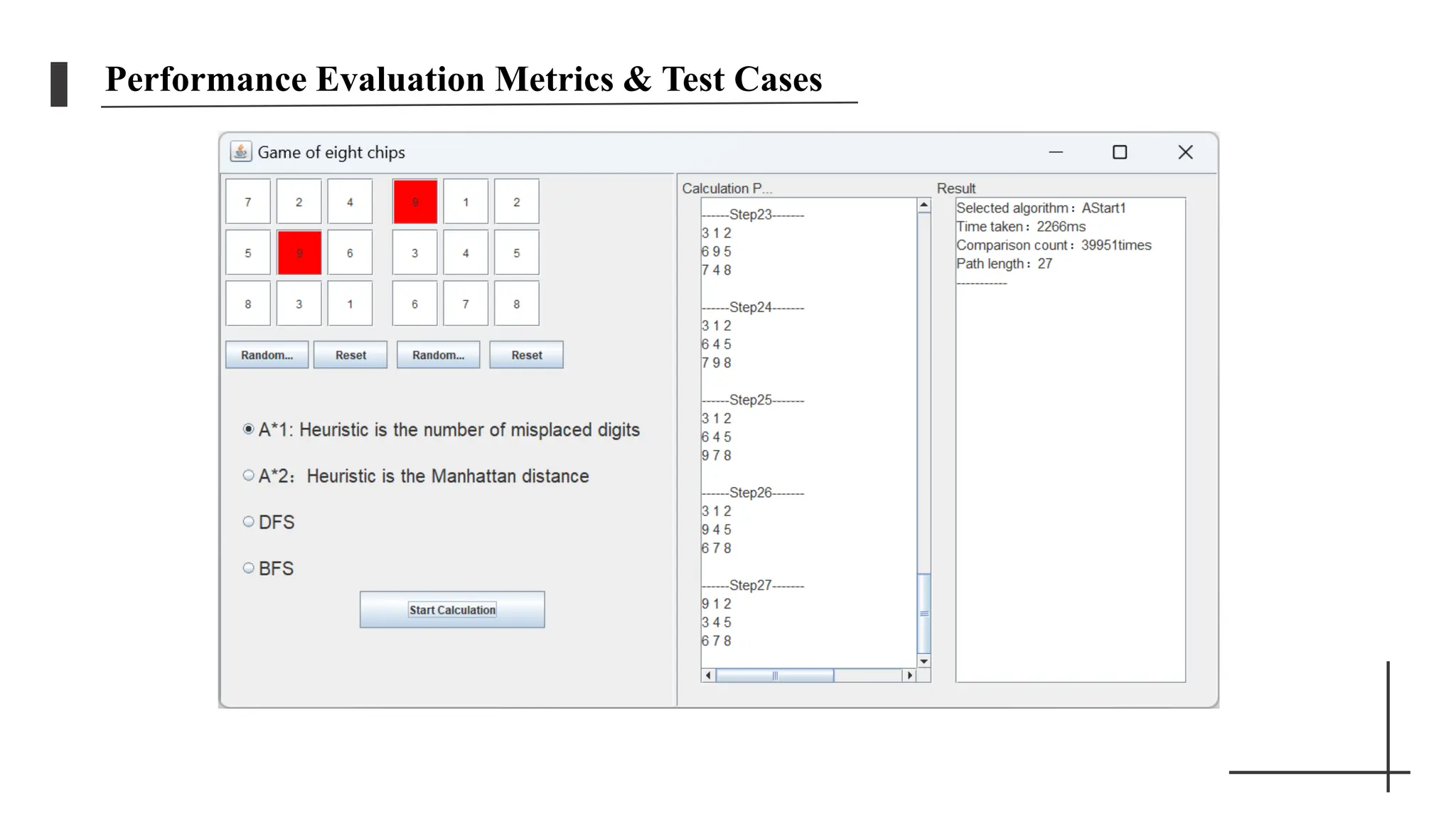
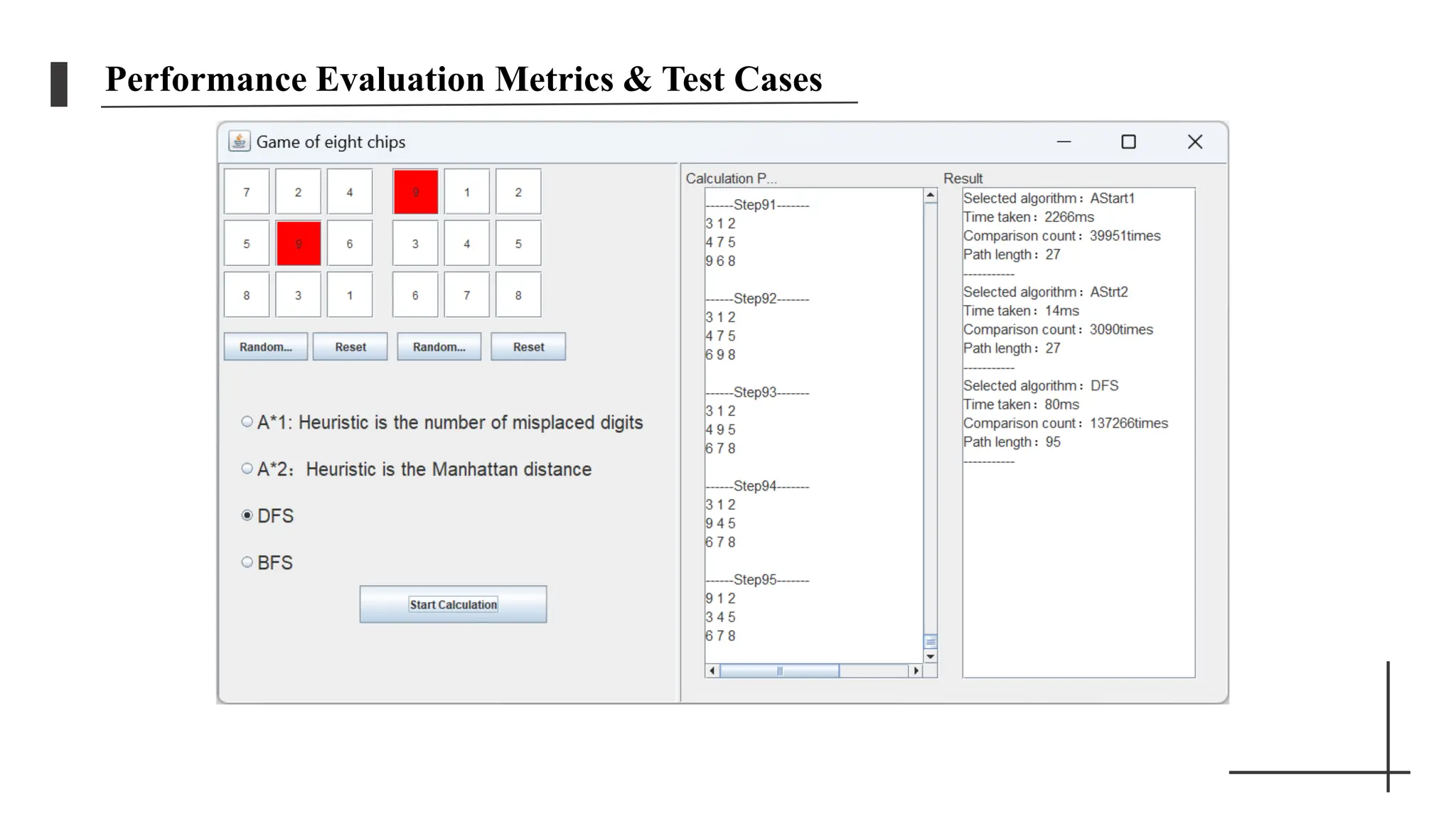
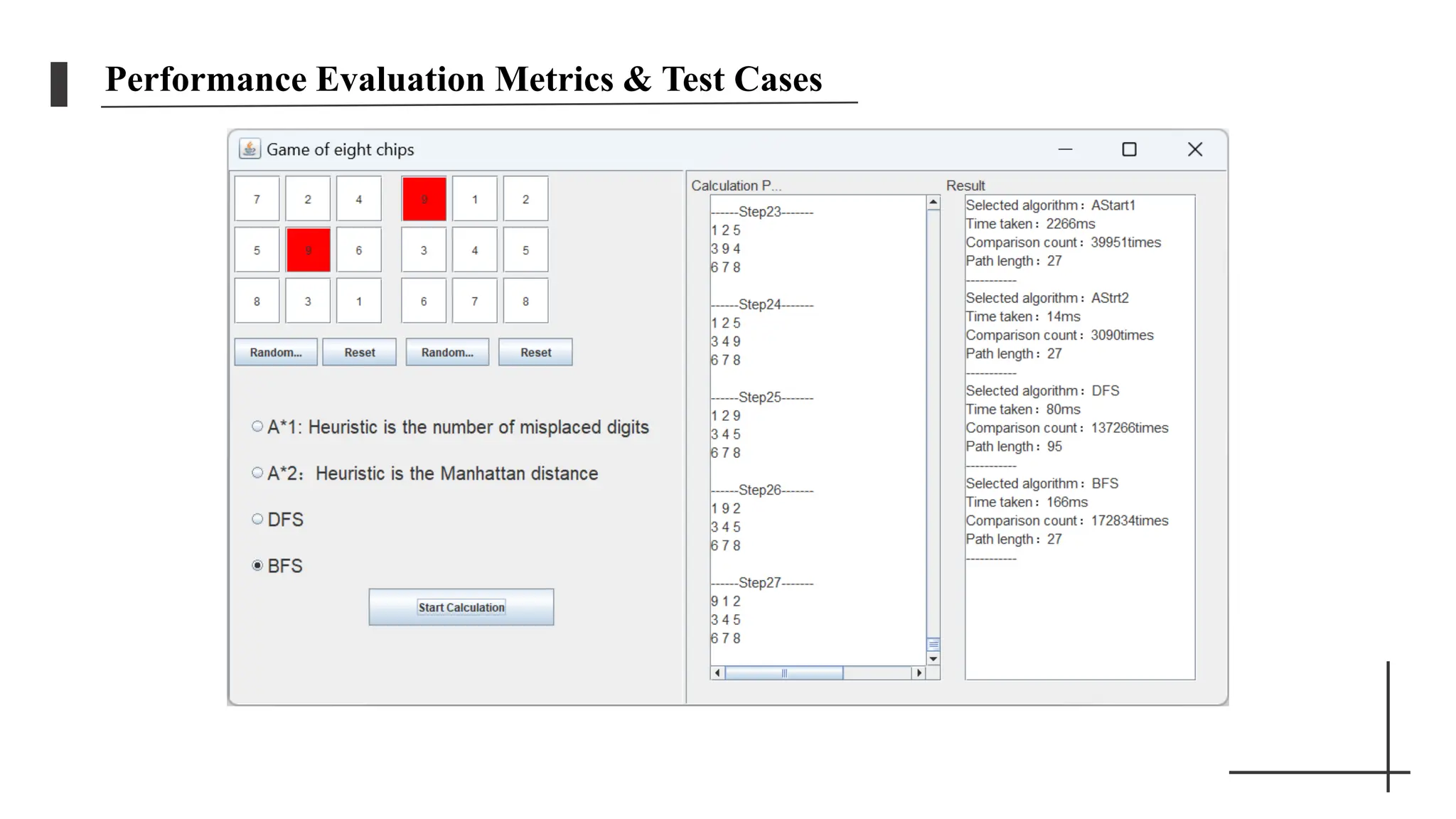
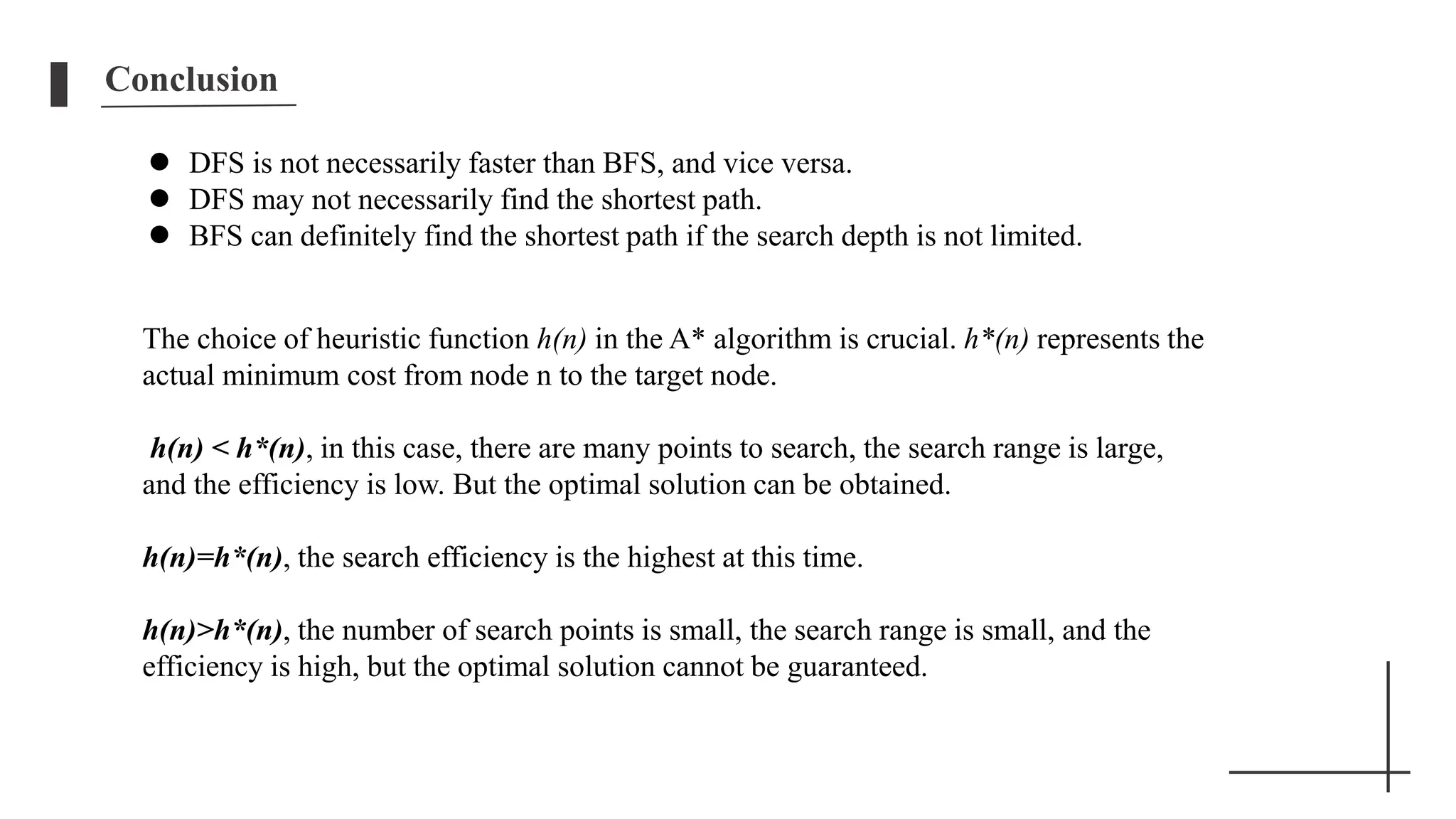

The document discusses the game of eight chips, a heuristic search task requiring the use of the A* algorithm for optimal pathfinding. It details the implementation of heuristic functions, specifically h1 (number of misplaced digits) and h2 (Manhattan distance), and their impact on algorithm performance. The conclusion highlights the complexity of choosing appropriate heuristic functions to balance search efficiency and optimal solutions.





![Heuristic in AI (Rule of thumb) [what, why, how] What: Mental shortcuts that ...](https://cdn.slidesharecdn.com/ss_thumbnails/3-5-week-250901055018-f7c36e71-thumbnail.jpg?width=640&height=640&fit=bounds)