Download as PDF, PPTX


![手段
n学習済みモデルにより検出された手の把持タイプを予測
• 分類データセット : YCB-Affordance[Corona+,CVPR2020]
n手と物体の画像を連続したフレームで繋ぎ合わせ,トラックを形成
nトラックは状態依存の特徴量の学習に利用
n手と物体の相互作用はフレームごとの予測を用いて学習](https://image.slidesharecdn.com/20230406humanhandsasprobesforinteractiveobjectunderstanding-230414082740-561b631f/85/Human-Hands-As-Probes-for-Interactive-Object-Understanding-4-320.jpg)




![モデルの構成と学習
nマスクされた領域はエンコーダーで処理
• エンコーダー : ResNet-50 [He+, CVPR2016]
n2つのタイプを予測する別々のヘッドに送信
• マスクセグメンテーション
• 把持タイプ
n2値クロスエントロピーロスで学習](https://image.slidesharecdn.com/20230406humanhandsasprobesforinteractiveobjectunderstanding-230414082740-561b631f/85/Human-Hands-As-Probes-for-Interactive-Object-Understanding-9-320.jpg)

![実験設定
nビデオデータセット
• EPIC-KITCHENS
• EPIC-KITCHENS-55 [Damen+, ECCV2018][Damen+, TPAMI2021]
• EPIC-KITCHENS-100 [Damen+, IJCV2021]
nイメージデータセット
• COCO [Lin+, ECCV2014]
• ImageNet-1k [Deng+, CVPR2009]
• ImageNet-21k [Deng+, CVPR2009]
nセグメンテーション
• Mask R-CNN [He+, ICCV2017]](https://image.slidesharecdn.com/20230406humanhandsasprobesforinteractiveobjectunderstanding-230414082740-561b631f/85/Human-Hands-As-Probes-for-Interactive-Object-Understanding-12-320.jpg)
![物体の状態に反応する特徴のテスト
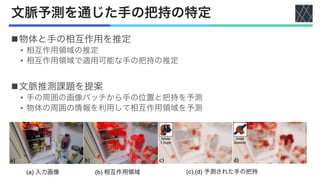
n学習した特徴空間 𝜙% の物体状態の分類に対する性能をテスト
• ImageNetの事前学習より高性能
• 教師あり学習より高性能
• 他の自己教師学習より高性能
• SimCLR [Chen+, ICML2020]
• TCN [Sermanet+, ICRA2018]
• 低データ量や新規物体への汎化
においての性能向上
分類の性能を平均精度で比較
TSC:Temporal SimCLR
OHC:Object-Hand Consistency](https://image.slidesharecdn.com/20230406humanhandsasprobesforinteractiveobjectunderstanding-230414082740-561b631f/85/Human-Hands-As-Probes-for-Interactive-Object-Understanding-13-320.jpg)






Mohit Goyal, Sahil Modi, Rishabh Goyal, Saurabh Gupta, "Human Hands As Probes for Interactive Object Understanding" CVPR2022 https://openaccess.thecvf.com/content/CVPR2022/html/Goyal_Human_Hands_As_Probes_for_Interactive_Object_Understanding_CVPR_2022_paper.html





















![[DL輪読会]STORM: An Integrated Framework for Fast Joint-Space Model-Predictive C...](https://cdn.slidesharecdn.com/ss_thumbnails/20211224articulatedmanipulationdl-220106042908-thumbnail.jpg?width=640&height=640&fit=bounds)



































