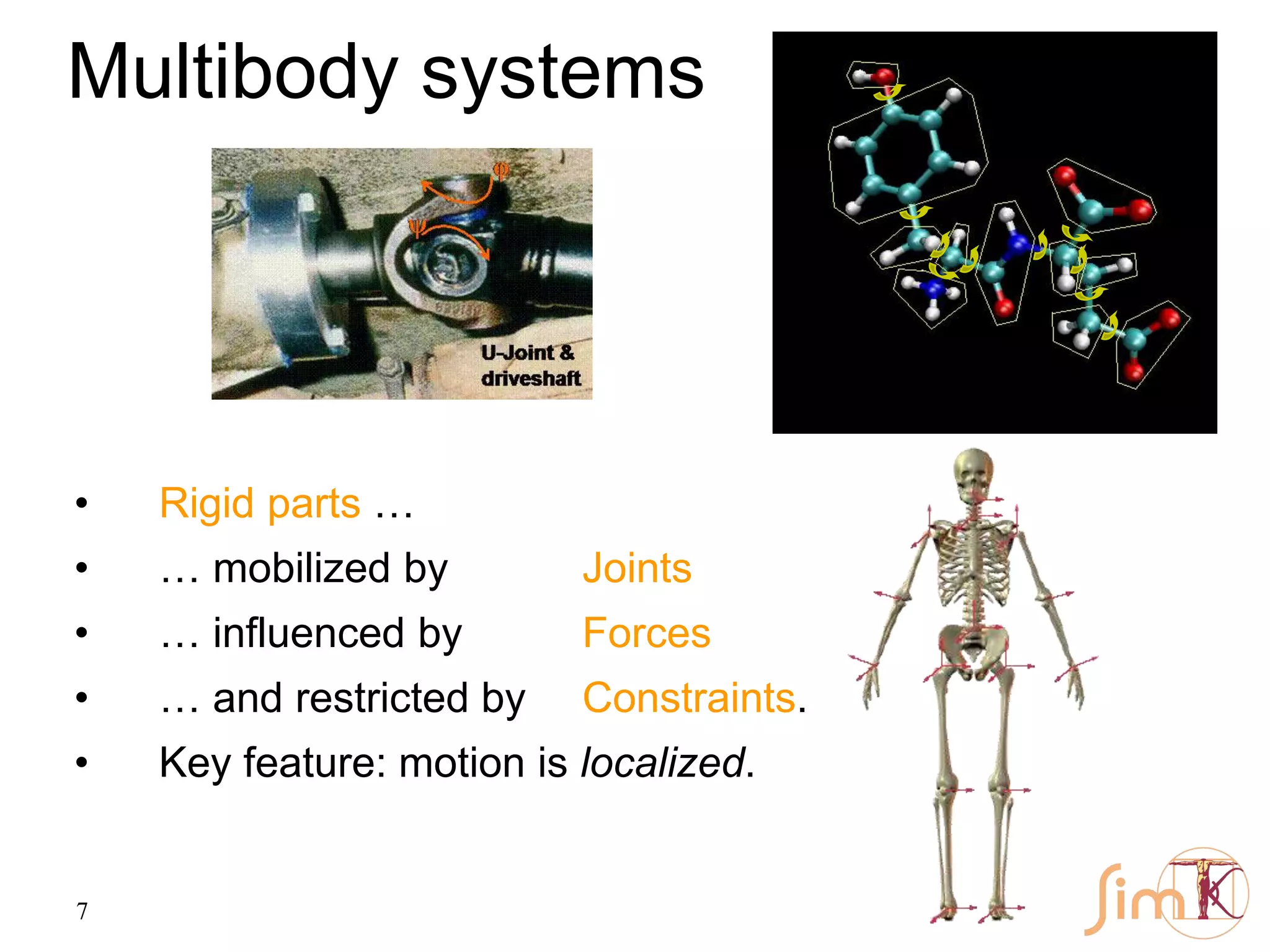
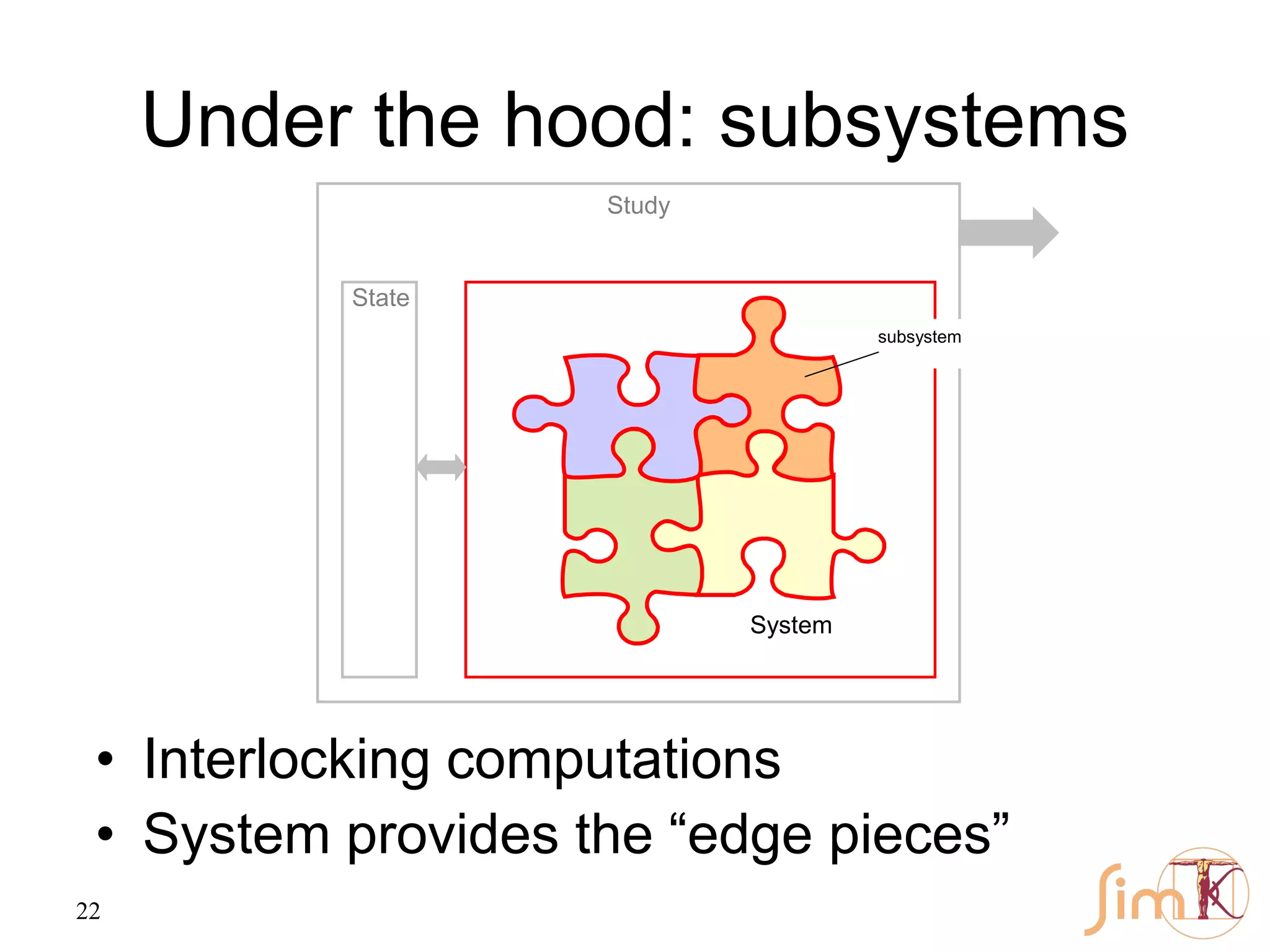
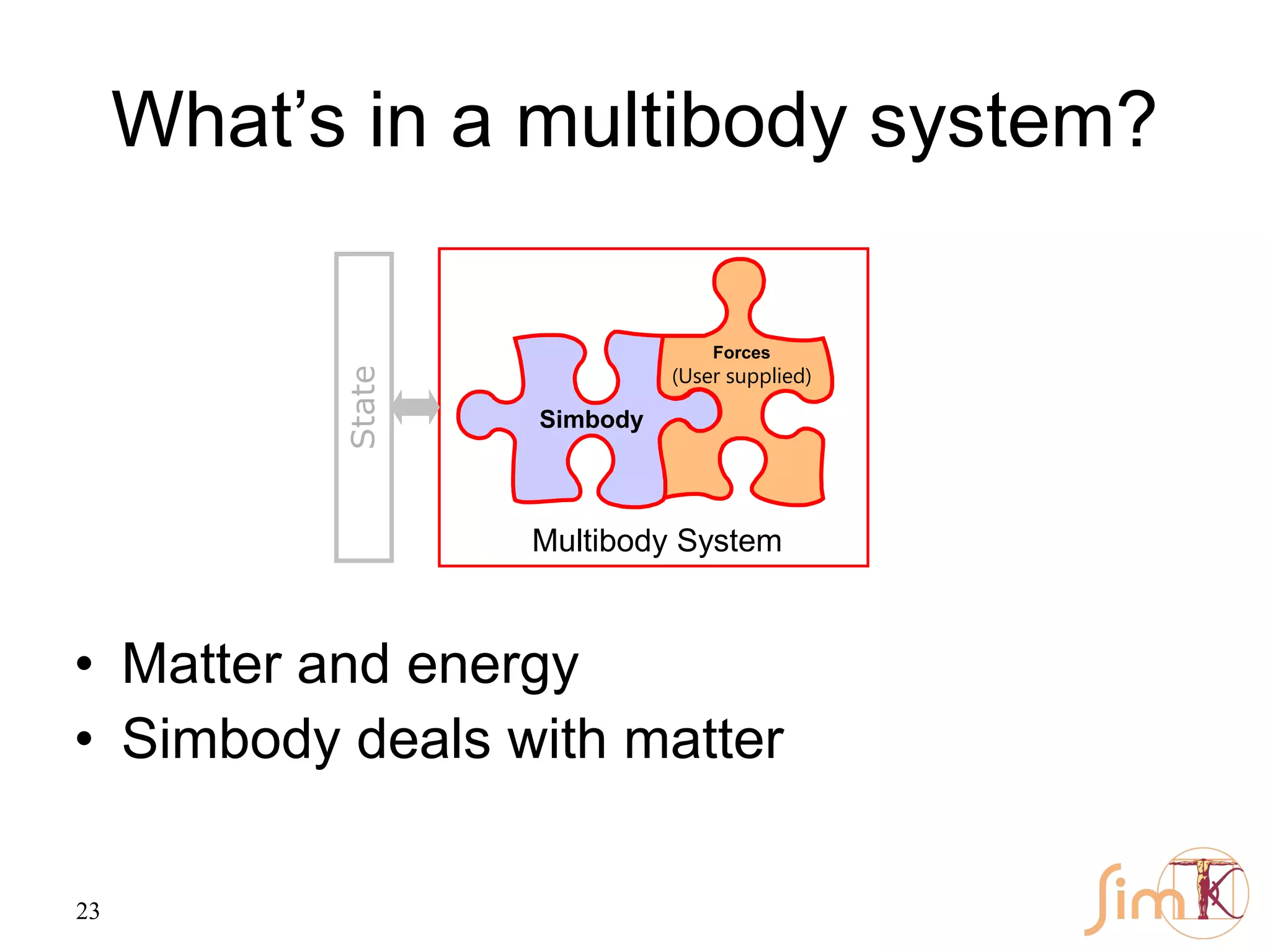
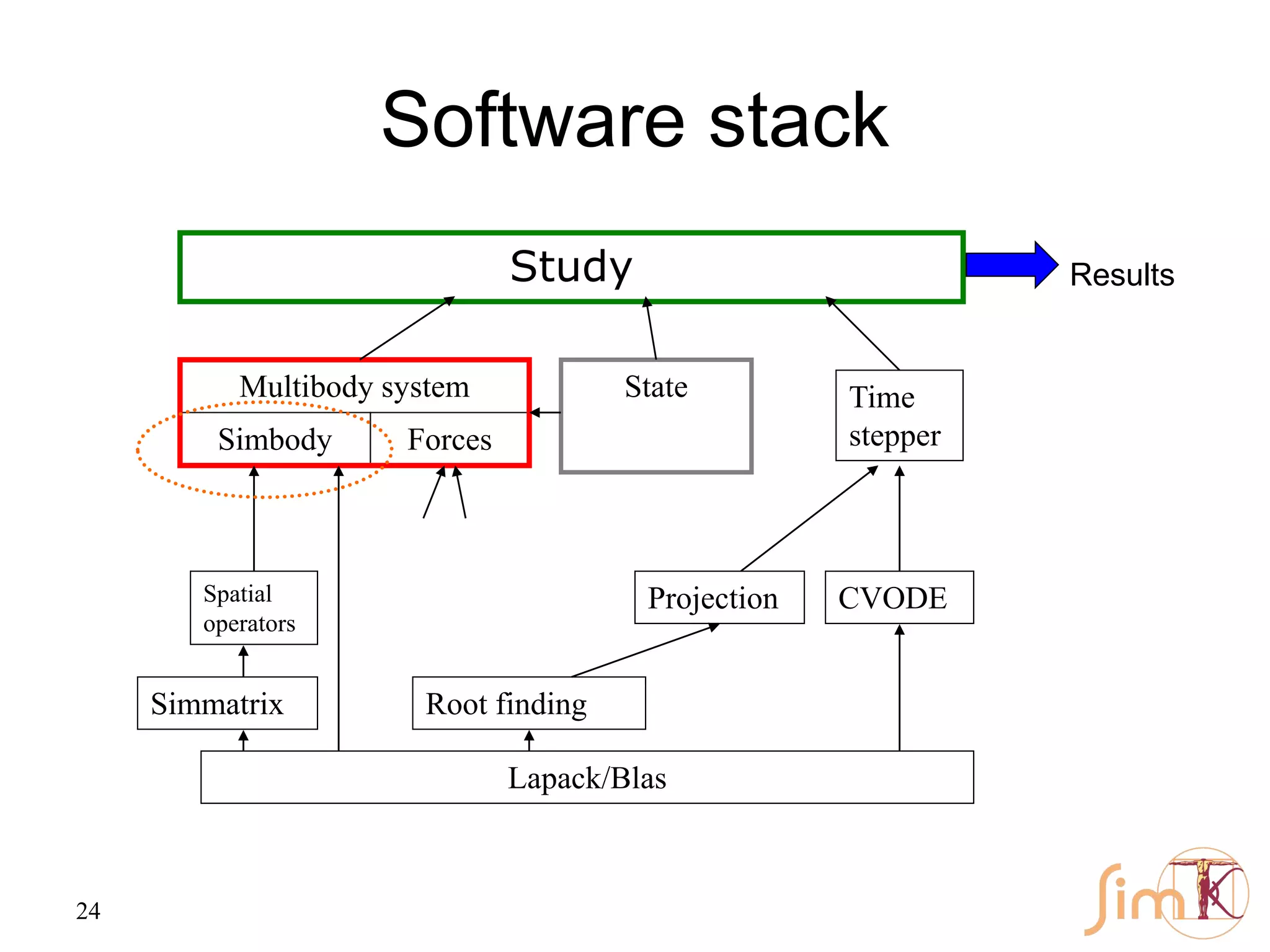
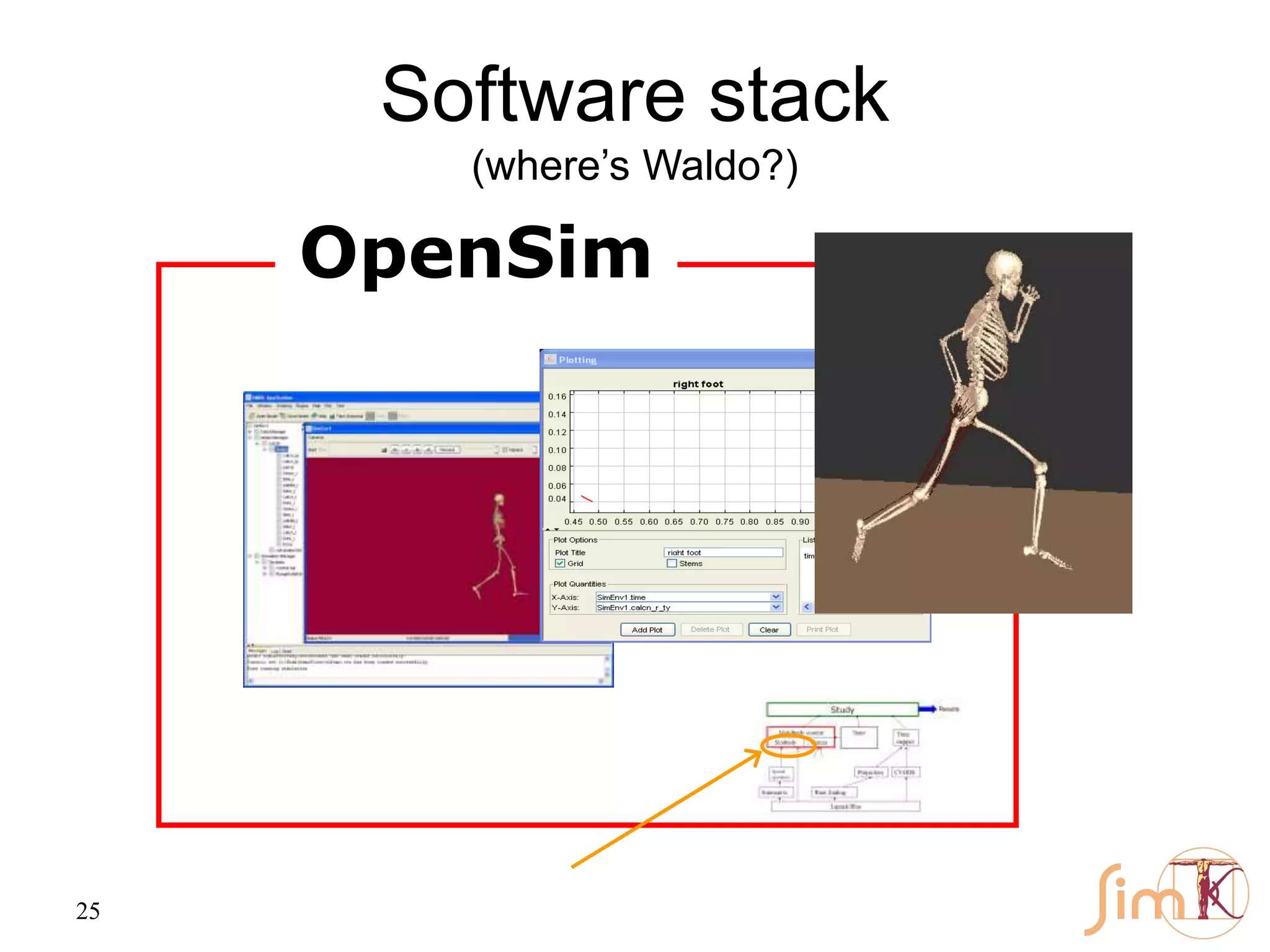
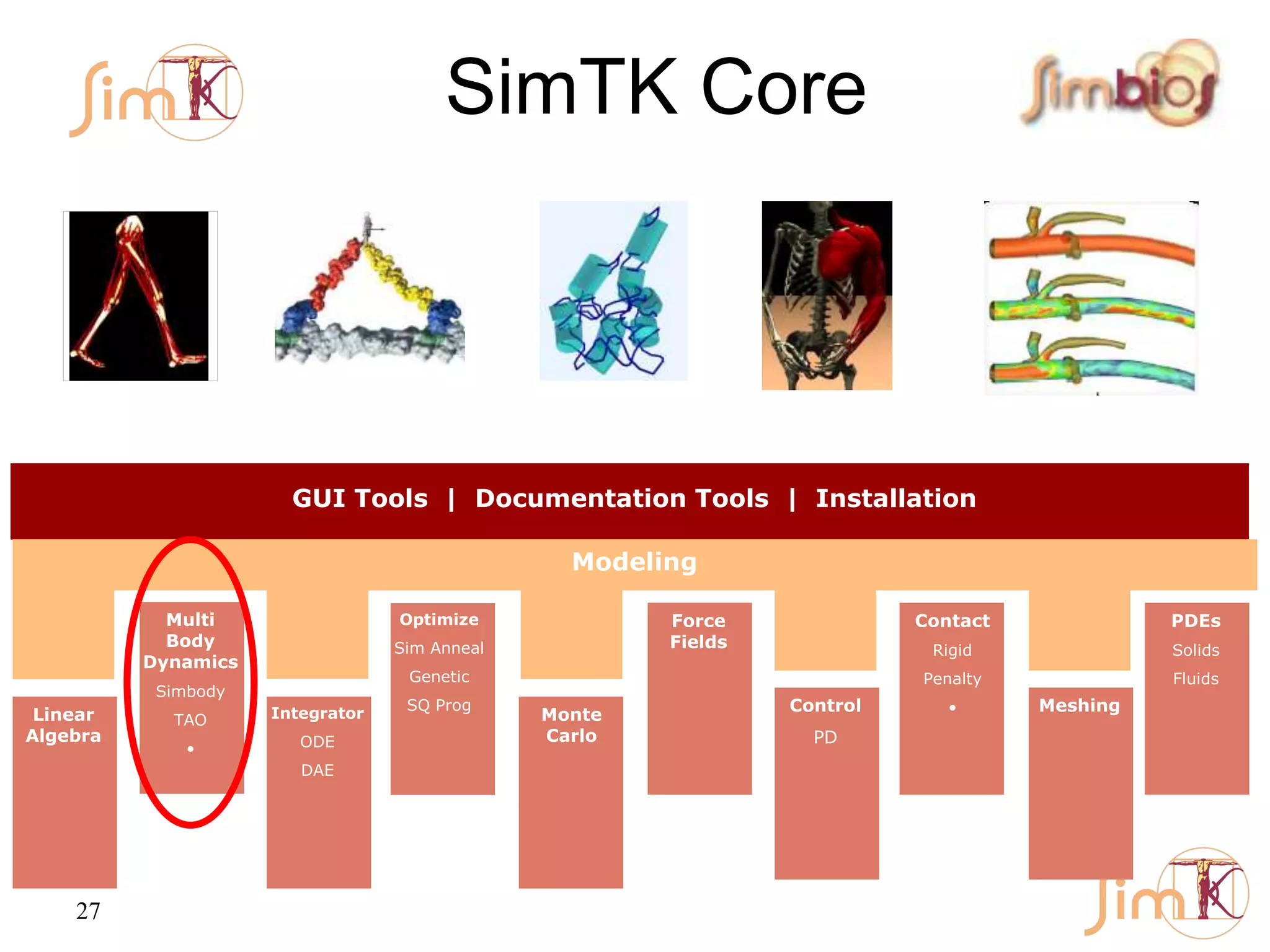
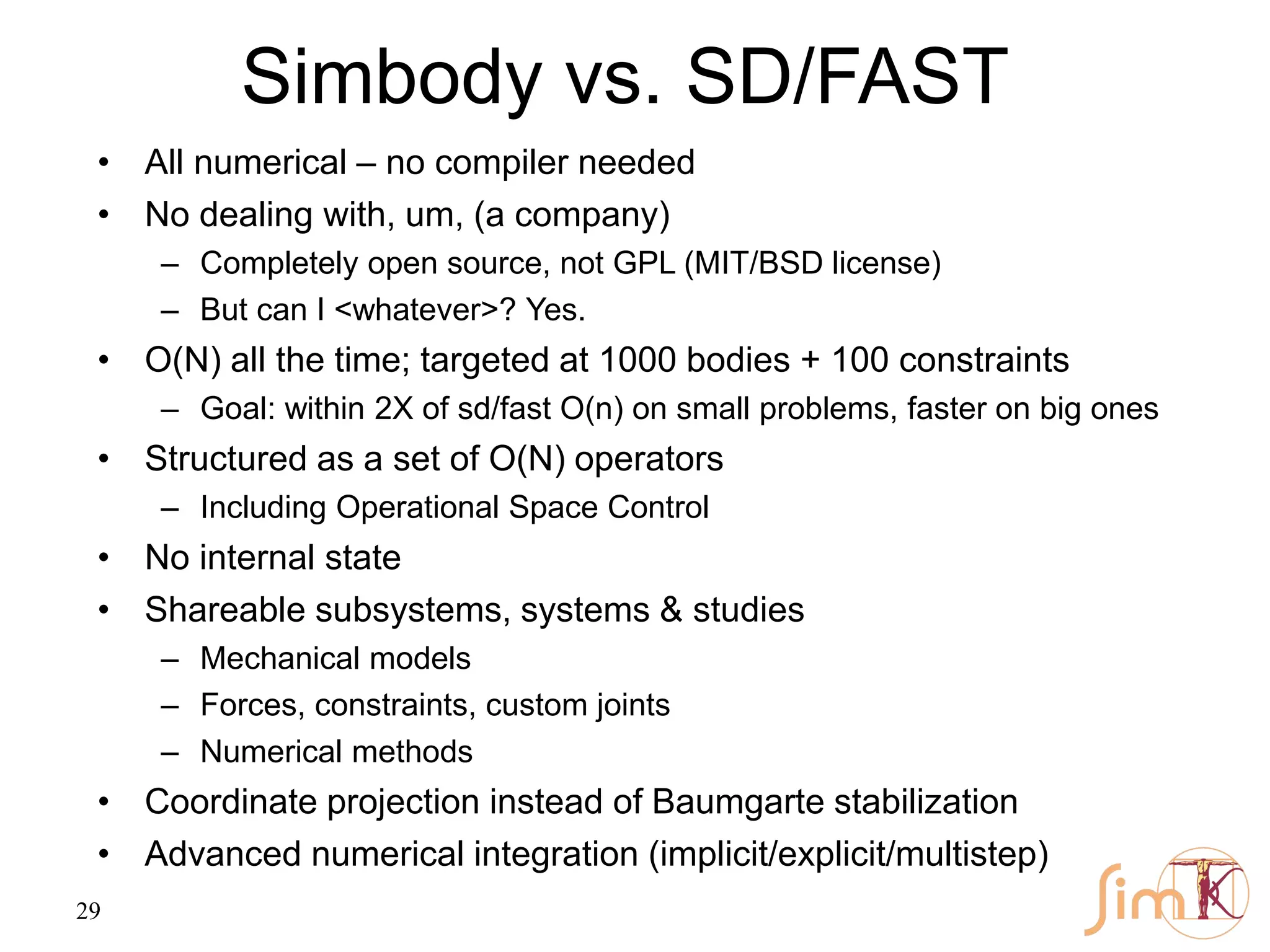
Simbody is a multibody dynamics library for modeling biological structures. It uses abstract representations of rigid bodies connected by joints and constrained by restrictions to simulate dynamics described by classical physics. Simbody models are composed of subsystems that interact to simulate motion over time. It provides an application programming interface and aims to replace commercial software while being open source and extensible. The current version provides basic functionality and the next major release will have complete capabilities on par with other software.