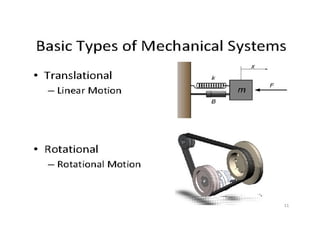
Translational Motoion
Translationalmotion refers to the type of oscillatory
motion in which an object or system moves back and
forth along a straight line or a specific direction.
It is also called linear motion A straight motion of a
rigid body
4.
Translational Motion
EXAMPLES:
• Acar driving on a straight road
• A train moving on tracks
• A falling apple
• A person walking on running
• Mass spring system
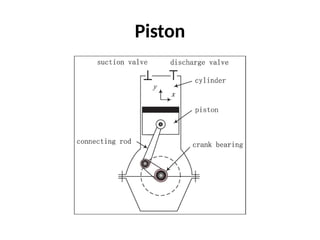
• Piston in engine
Translational Motion
WHY IT’SIMPORTANT:
Translational motion is fundamental in physics
and engineering. It helps:
Predict how objects move under forces.
Design machines and vehicles.
Understand natural motion like falling objects
or flowing fluids.
7.
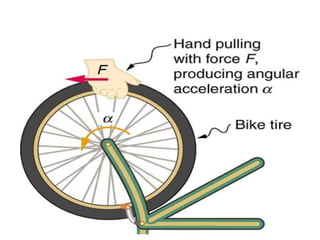
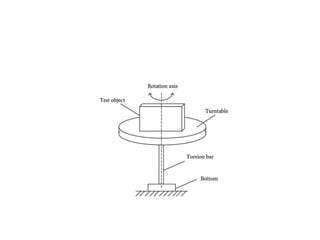
Rotational Motion
Rotational Motionis a type of oscillatory motion
in which an object or system oscillates back
and forth around an axis. Unlike translational
vibration (which involves linear movement),
rotational vibration involves angular motion —
a twisting or turning effect.
A motion described by a rigid body about a
pivoted point (fixed point) about an axis
It should be clockwise or anti clock wise
Rotational Vibration
WHY IT’SIMPORTANT:
Helps detect mechanical faults in rotating
machinery.
Prevents resonance, which can damage
engines and rotors.
Improves performance and safety in rotating
systems.
13.
Types of translationalmotion
Uniform Motion
Motion with constant velocity (speed and
direction).
Examples:
• A car cruising at a constant speed on a straight
highway.
• A conveyor belt moving at a constant speed.
14.
Types of translationalmotion
Non-Uniform Translational Motion
Motion with changing velocity (speed or
direction).
Examples:
• A car accelerating or braking.
• A ball thrown upwards and then falling back
down.
15.
Types of translationalmotion
Rectilinear Motion:
Motion in a straight line.
Examples:
• A car moving on a straight road.
• A ball thrown vertically upwards.
• A train traveling on a straight track
16.
Types of translationalmotion
Curvilinear Motion:
Motion along a curved path.
Examples:
• A car turning a corner.
• A projectile motion (e.g., a thrown ball).
• A train traveling on a curved track.
17.
Types of RotationalMotion
Uniform Rotational Motion
Object move with contant angular velocity with
no angular accelaration.
Example:
• a spining top rotating at a constanst rate.
• a wheel rotating at aconstant speed.
18.
Types of RotationalMotion
Non-Uniform Rotational Motion
Motion with changing velocity (speed or
direction).
Examples:
• A car accelerating or braking.
• A ball thrown upwards and then falling back
down.
21.
Advantages of Rotational
1.Efficient energy transfer: Rotational motion
can be used to transfer energy efficiently, as
seen in gears and motors.
2. Stable motion: Rotational motion can provide
stable and predictable movement, making it
useful in applications like gyroscopes.
3. Compact design: Rotational motion can be
achieved in compact designs, such as in
motors and generators.
22.
Translational
1. Linear movement:Translational motion
allows for linear movement, which is
essential in many applications, such as
conveyor belts and linear actuators.
2. 2. Precise control: Translational motion can
be controlled precisely, making it useful in
applications like CNC machines and robotics.
3. 3. Direct motion: Translational motion can
provide direct motion, which is useful in
applications like transportation and material
handling.
23.
Disadvantages of Rotational
1.Vibration and noise: Rotational motion can
generate vibration and noise, particularly at
high speeds.
2. Bearing wear: Rotational motion can cause
wear and tear on bearings, leading to
maintenance issues.
3. Energy loss: Rotational motion can result in
energy loss due to friction and other factors.
24.
Translational
1. Limited range:Translational motion is often
limited to a specific range or distance.
2. Friction and wear: Translational motion can
cause friction and wear on moving parts,
leading to maintenance issues.
3. Control complexity: Controlling translational
motion can be complex, particularly in
systems with multiple axes or degrees of
freedom.
25.
Applications
1. Machinery: Bothrotational and translational
motion are used in machinery, such as
engines, pumps, and gearboxes.
2. Robotics: Rotational and translational motion
are used in robotics to achieve precise
movement and control.
3. Transportation: Translational motion is used
in transportation, such as in cars, trains, and
airplanes, while rotational motion is used in
wheels and engines.
26.
Machinery used inboth motion
• Lathes: Lathes use rotational motion to spin
the workpiece, while the cutting tool moves
translationally along the workpiece.
• Milling machines: Milling machines use
rotational motion to spin the cutting tool, while
the workpiece moves translationally in
multiple axes.
• Drilling machines: Drilling machines use
rotational motion to drill holes, while the drill
bit moves translationally into the workpiece.
27.
Machinery:
• CNC machines:CNC (Computer Numerical
Control) machines use both rotational and
translational motion to perform various
machining operations, such as milling, drilling,
and turning.
• Industrial robots: Industrial robots often use a
combination of rotational and translational
motion to perform tasks like assembly,
welding, and material handling.


![group_6_presentation[1].pptxhakskoajsjak](https://image.slidesharecdn.com/group6presentation1-250506023058-e2c19c52/85/group_6_presentation-1-pptxhakskoajsjak-28-320.jpg)






















































