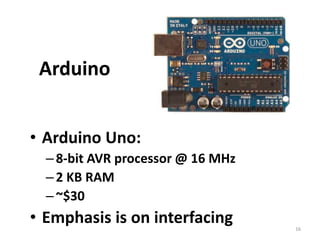
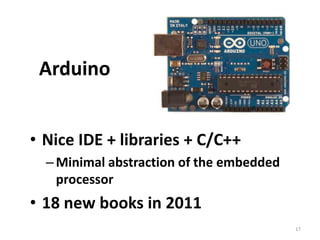
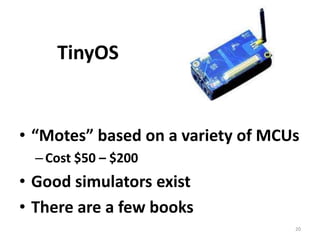
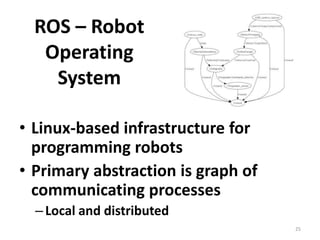
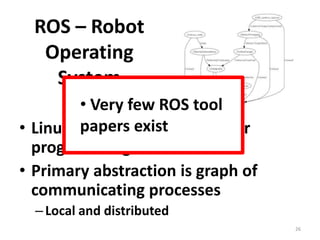
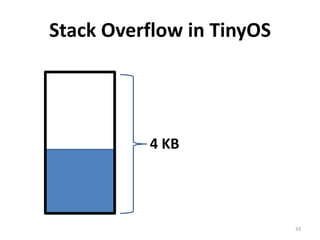
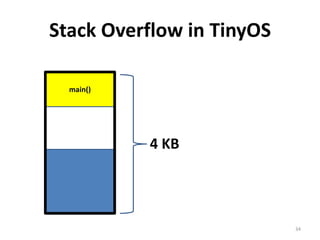
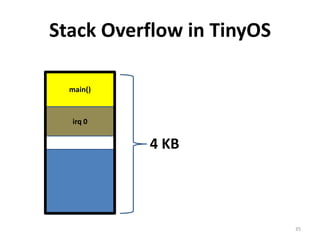
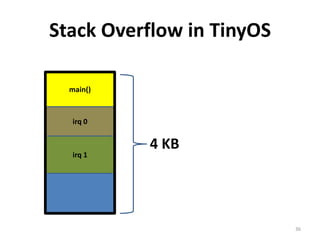
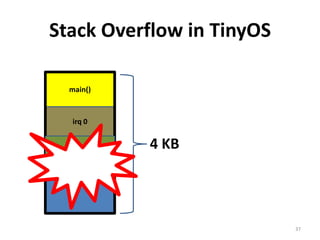
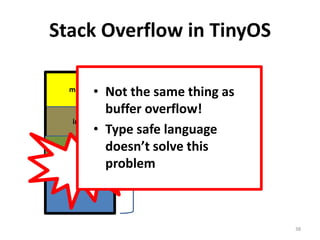
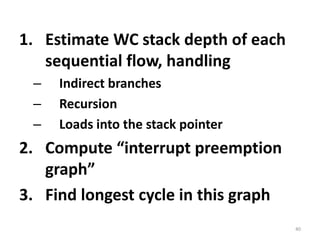
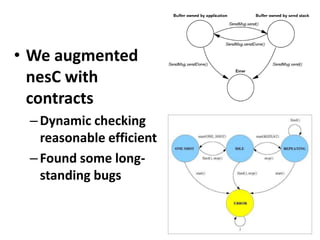
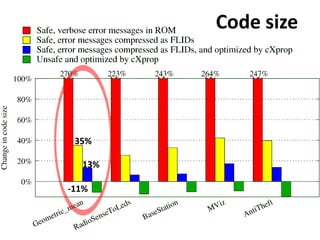
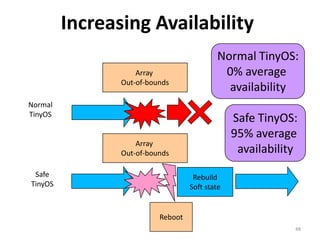
The document discusses testing embedded software and highlights several challenges and opportunities. It notes that while embedded systems are diverse, there are now many open hardware platforms like Arduino, TinyOS, Android and ROS that enable more academic research. However, properties to test for are difficult to define as embedded systems interact continuously with the physical world. The document advocates using tools like static analysis, contracts and model checking to test for stack overflow, interface correctness, memory safety and application-level distributed properties. Many bugs were found this way in existing systems like TinyOS.
![“Over 15 billion ARM based chips shipped to date”[ARM web site, 2011]“The microcontroller market is forecast to reach over $16 billion worldwide in 2011”[Microcontroller Market Tracker, 2011]2](https://image.slidesharecdn.com/issta11-110722124447-phpapp01/85/Issta11-2-320.jpg)







![[CB16] COFI break – Breaking exploits with Processor trace and Practical cont...](https://cdn.slidesharecdn.com/ss_thumbnails/cb16shinaen-161108081131-thumbnail.jpg?width=640&height=640&fit=bounds)