Human locomotion or gait, may be defined as a translatory progression of the body as a whole,produced by coordinated, rotatory movementys of body segments
INTRODUCTION
• It isalso called human locomotion.
• It is a style of walking pattern.
• The walking pattern or style may differ
from individual to individual.
• It depends on the age, sex, mood, of an
individual and may be due to some
diseases.
4.
• The alternatingmovements of the lower
extremities essentially support and carry
along the head, arms, and trunk (HAT).
• HAT constitutes about 75% of total body
weight.
• The head & arms – 25 %
• The trunk – 50%
5.
DEFINITION
• Human locomotionor gait, may be defined
as a translatory progression of the body as
a whole,produced by coordinated, rotatory
movementys of body segments
6.
HISTORY
• In 384– 322 BC aristotle can be attributed with
the earliest recorded commonts regarding the
manner in which humans walk.
• In 1608 – 1679 Giovanni Borelli further progress
was made through the experiments and theories
in human locomotion.
• In 1861 – 1917 Otto ficher was a german
mathematician who was the first to conduct a
three – dimensional gait analysis.
7.
PURPOSE OF GAIT
1.Maintenance of support of the HAT .
2. Maintenance of upright posture and balance of the body.
3. Control of the foot trajectory to achieve safe ground
clearance and a gentle heel or toe landing.
4. Generation of mechanical energy to maintain the present
forward velocity or to increase the present forward velocity
or to increase the forward velocity.
5.Absorption of mechanical energy for shock absorbtion
and stability or to decrease the forward velocity of the body.
8.
GAIT CYCLE
• Itis a period of time from one heel strike to
next heel strike of the same limb.
• It consist of two phases,
• Stance phase – 60 %
• Swing phase – 40%
Foot flat
• Itoccurs immediately following heel strike.
It is the point at which the foot fully
contacts the floor
16.
Mid stance
• Itis the point at which the body passes
directly over the supporting extrimity
17.
Heel off
• Thepoint following midstance the heel of
the same extrimity leaves the ground.
18.
TOE OFF
• Thepoint following heel off when only the
toe of the same extrimity is leave contact
with the ground
19.
ACCELERATION
• It beginsonce the toe leaves the ground &
continues untill mid – swing ,or the point at
which the swinging extrimity is directly
under the body
20.
MID SWING
• Itoccurs approximately when the
reference extrimity passes directly under
the body.
• It extends from end of acceleration to the
beginning of deceleration.
21.
DECLERATION
• It occursafter mid – swing. When the
reference extrimity is decelerating in
preparation for heel strike.
22.
PARAMETERS OF GAIT
•Time and distance are two basic
parameters of gait.
1. Temporal ( time ) variables
2. Distance ( spatial ) variables
TEMPORAL VARIABLES
• Singlelimb support time
• Double support time
• Step duration
• Stride duration
• Cadence
• Speed
25.
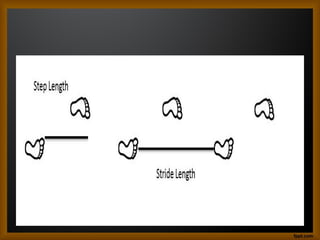
STEP LENGTH
• Thisis the distance between the heel
strike of one lower extrimity to the heel
strike of another extrimity.
26.
STRIDE LENGTH
• Thisis the distance between the heel
strike of one lower extrimity to the heel
strike of the same lower extrimity once
again to the ground
28.
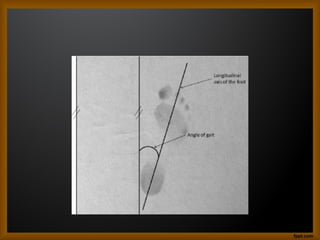
DEGREE OF TOEOUT
• It represents the angle of foot placement.
The lines intersecting the center of heel
and the second toe is called as foot angle.
• ▪ In normal walking the foot angle is 7 it
may decrese in fast walking
30.
SINGLE LIMP SUPPORTTIME
• It is the period at which single limb
contacts the ground.
• The single limb support has been during
the reference extremities in the mid –
stance phase.
31.
DOUBLE LIMB SUPPORT
TIME
•This is period at which both the lower
extrimities having contact with ground.
• The double limb support is possible
between heel-of or toe-off of the one
extrimity and the heel strike or foot flat of
another extrimity
STRIDE DURATION
• Itis the time taken for completion of heel
strike of one extrimity to the heel strike of
the same extrimity again
34.
CADENCE
• It isthe number of steps taken per minute .
cadence = no. of steps/min. s
• Normal cadence – 100 – 115 spm
35.
SPEED
• Distance coveredby the body per minutes.
Usually measured in m/s.
• Averge velocity = step length cadence
• Average speed = 80m/min
36.
DETERMINANTS OF GAIT
•Displacement of center of gravity (COG).
• Factors responsible for minimizing
displacement of center of gravity.
37.
CENTER OF GRAVITY
•It is an imaginary point at which all the
weight of the body is concentrated at a
given instant.
• Center of gravity lies 2 inches in front of
the second sacral vertebra
• Center of gravity follows vertical
displacement and horizontal displacement.
38.
DISPLACEMENTS
• Rhythmic up& down movement. Highest
point – mid stance, lowest point– double
support average, displacement – 5cm vt
plane Hrz plane.
• Rhythmic side to side movement . lateral
limit – midstance average,displacement –
5cm Hz plane vt plane.
PELVIC ROTATION
• Rotationof pelvis in horizontal plane im
swing phase.
• Total of 8 degree decrease angle of hip
flexion & extension enables a longer
length without further lowering of center of
gravity.
43.
PELVIC TILT
• Thepelvis slopes downwards laterally
towards the leg which is in swing phase.
• Reduce the vertical movements of the
upper body and therby increase energy
efficiency.
• Decrease the displacement of center of
gravity
44.
KNEE FLEXION DURING
STANCE
•As the hip joint passes over the foot during
the support phase, there is some flexion of
the knee.
• This reduces vertical movements at the
hip. Decrease the displacement of center
of gravity.
45.
ANKLE MECHANISM
• Lengthenthe leg at heel strike reduce the
lowering of center of gravity.
• Hence smoothen the curve of center of
gravity
46.
FOOT MECHANISM
• Lengthenthe leg at toe off as ankle moves
from dorsiflexion to planter flexion .
• Reduce the lowering of center of gravity,
hence smoothen the curve of center of
gravity.
47.
ARMS AND TRUNK
•The trunk, arms and shoulders also rotate
to ensure balance upper limb
• swing opposite to stance leg to produce a
smooth balanced gait
48.
FUNCTION OF
DETARMINANTS OFGAIT
• Increase the efficiency and smoothness of
gait.
• Decrease the vertical and lateral
displacement of center of gravity.
• Decrease the energy expenditure.
• Make gait more graceful.


























































![PERI-PROSTHETIC FRACTURE NAIL-PLATE CONSTRUCT [NPC].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/drarunkumardrmohamedashrafperiprostheticfrasturenail-plateconstructnpc-260209164459-7e9d15a1-thumbnail.jpg?width=640&height=640&fit=bounds)








