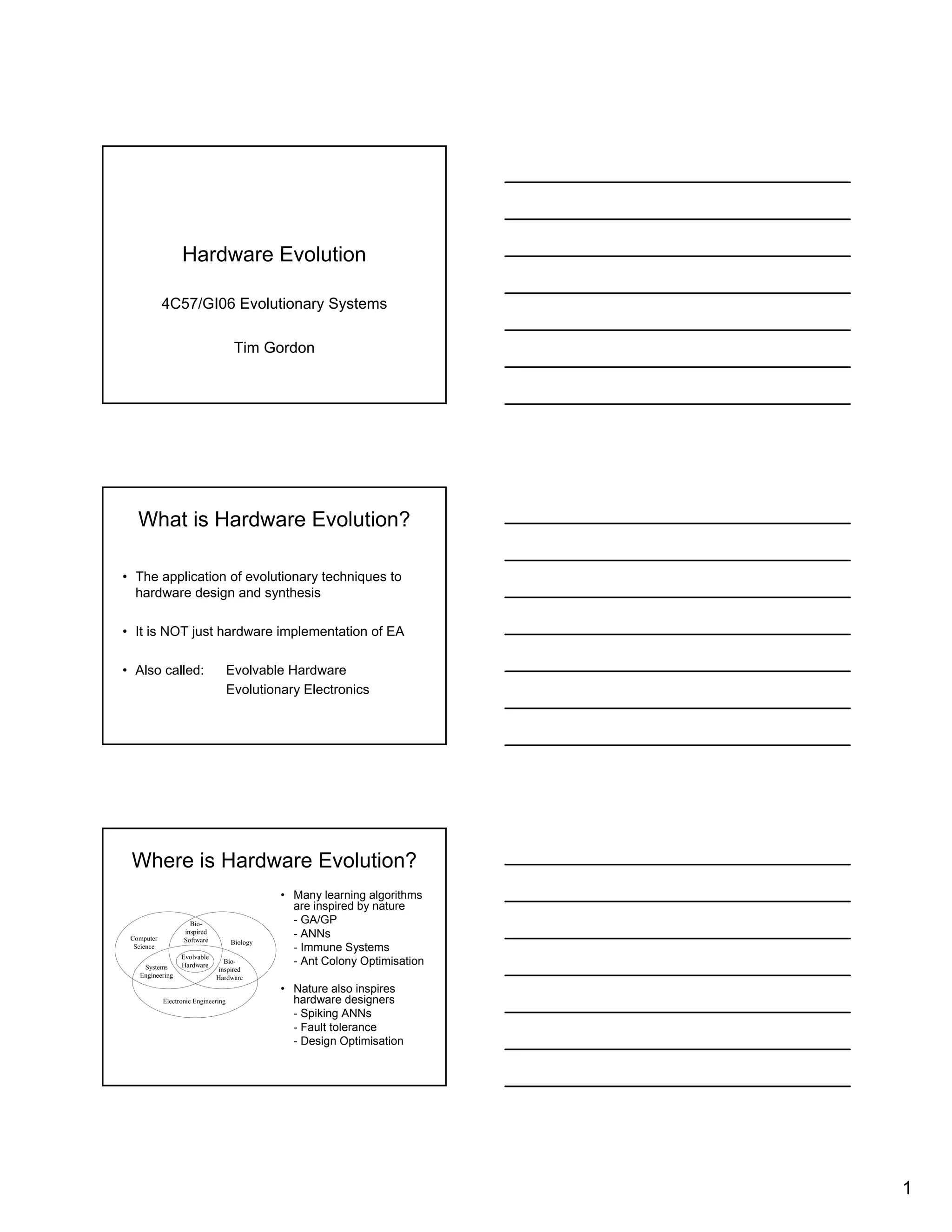
The document discusses hardware evolution, which applies evolutionary techniques to hardware design and synthesis. It is not just implementing evolutionary algorithms in hardware. Hardware evolution can optimize hardware designs, map designs to programmable chips like FPGAs, and even evolve digital circuits directly on reconfigurable hardware. The document provides examples of how evolution can be used to optimize adder circuits, image compression algorithms, and other applications implemented on reconfigurable hardware. It also discusses constraints and evaluation strategies in hardware evolution.