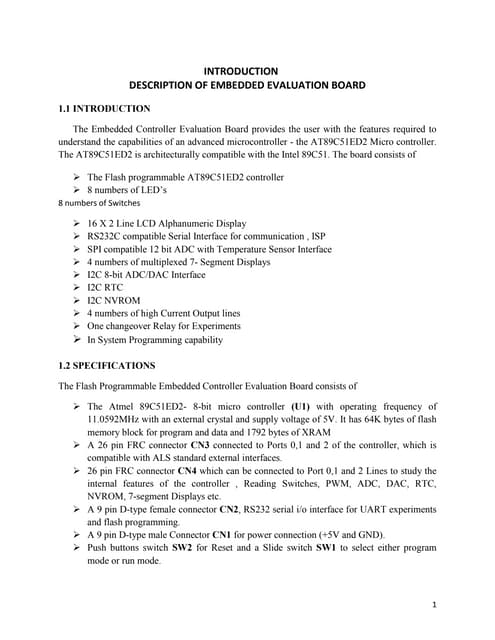
This document describes an assignment involving designing a system to send data from one PIC16F877A microcontroller to another using a FIFO. It detects single bit errors using parity check, and has the receiver send a retransmit command when an error is detected, increasing the error count. A bit error injector was used to test the system by increasing the probability of errors. The document includes wiring diagrams, flow charts of the noise injection, transmitter and receiver processes, a test plan and procedure, and considerations of the design.







![______________________________________________________________________________
-8 of 19-
Start
u32 randonCounter = 0
u16 prob[11] = [values…..]
If(TMR2IF == True)
Ra4 = 1 (Remove bit error)
milliSecondCounter++
randonCounter++
If (randomCounter == 500)
RA5 = !RA5
randomCounter = 0
if(myRandomNumber >
prob[value])
errorCount++
RA4 = 0
TMR2IF = False
If(INTF == True)
If (clockwise)
If (value == TOP_LIMIT)
Value = 0
Value++ If(value == 0)
Value--
Value = TOP_LIMIT
IMTF = False
End
Return
myInterruptFunction()
Y
Y
Y
Y
Y Y
N
N
N
N
N
Y
N](https://image.slidesharecdn.com/5b2dd77b-d037-4c14-8812-2713f858453e-170112194854/85/Emeto_Chukwuemeka_7691553_A8-8-320.jpg)
![______________________________________________________________________________
-9 of 19-
Start
U32 secoundsCounter = 0
u8 seed = 0
char string1[20]
portInit()
LCDInit()
ATDInit()
seed = getADC()
srand(seed)
timer2Init()
While(1)
myRandomNumber = rand()
if(milliSecondsCounter >= 1000)
secondsCounter++
milliSecondsCounter = 0
sprintf(string1, "T:%lu P:%u%%",secondsCounter, 10*value)
clearDisplay()
setDisplayLine(1, 0)
writeString(string1)
sprintf(string1, "E:%lu", errorCount)
setDisplayLine(2, 0)
writeString(string1)
End
Main
Y
Y
N](https://image.slidesharecdn.com/5b2dd77b-d037-4c14-8812-2713f858453e-170112194854/85/Emeto_Chukwuemeka_7691553_A8-9-320.jpg)


![______________________________________________________________________________
-12 of 19-
Start
If INTF == 1
FIFO_Wn = 0;
FIFO_Rn = 1;
While (FIFO_NOT_FULL)
FIFO_D = i++
calcparity = Call function [Parity(FIFO_D)]
RA4 = calcparity;
FIFO_Wn = 0;
FIFO_Wn = 1
count++;
INTF = 0
If TMR2IF == 1
oneSecondCounter++
TMR2IF = 0
End
Y
Y
Y
N
N
N
myISR()
Start
portInit()
LCDInit()
FIFOReset()
timer2Init()
setDisplayLine(1, 0)
writeString("Throughput=")
setDisplayLine(2, 0)
writeString("RTnumber =");
Enable Interrupts
INTF = 0
TMR2IF = 0
INTE = 1
TMR2IE = 1
PEIE = 1
GIE = 1
delay(200)
INTF = 1;
While(1)
If (RE1 ==1)
retrans++
FIFOReset()
INTF = 1
If (oneSecondCounter == 19
ltoa(myNum, count, 10)
setDisplayLine(1, 11)
writeString(myNum)
ltoa(myNum, retrans, 10)
setDisplayLine(2, 11)
writeString(myNum)
prevCount = count
count = 0
oneSecondCounter = 0
End
Y
Y
N
N
main](https://image.slidesharecdn.com/5b2dd77b-d037-4c14-8812-2713f858453e-170112194854/85/Emeto_Chukwuemeka_7691553_A8-12-320.jpg)





![______________________________________________________________________________
-19 of 19-
7. The throughput compromises for no noise by sending bigger packets than it did previously and
this is how it is maximized. The throughput is optimized by sending smaller packets when there
is no noise. One factor affecting the different times is adjusting the clock cycle of the micro
controller, this will definitely increase or decrease the packet transmission time depending on
how the clock cycle is being adjusted. The throughput will definitely take longer to send the
smaller packets than the bigger ones because there are more smaller packets than they are bigger
ones. Getting an error will also increase the time it takes for transmission. A size of a packet
should be 256 and should have a 9-bit word. The packet size is also shorter when the noise level
increases because there are more errors and this causes lesser packet size. The packet size is
longer when the noise level decreases because there are less errors and therefore more good
packets.
7 Conclusion
After successfully building the required sender, receiver and bit injector error circuit with each
respective LCD, writing the code for the sender and receiver and using the given code for the bit
injector error circuit, debugging the code and finally implementing and running the code through
the MPLAB X IDE, the receiver circuit successfully received its respective information from the
sender and they both had the same throughput value which was one requirement of the project,
the receiver also detected errors from the bit injector when the probability was increased which
was another requirement of the project, a retransmit signal was sent from the receiver to the
sender each time the receiver received a bad byte, also another requirement of the project, and
finally, increasing the error probability increased the error count and the number of signals being
retransmitted while taking the error probability stopped the retransmit signal and the error count.
Therefore, all the requirements for the project were met.
References
[1].W. Kinsner, ECE4240 Microprocessor Interfacing For Real Time Systems, Final Lab Report
Guide (2014)
[2]. W. Kinsner, ECE3730 PRINCIPLES OF EMBEDDED SYSTEMS DESIGN, Project 4
manual, Dual-Microcontroller FIFO Data Transfer with Emulated Random Noise Injected into
the Data Channel, ECE3730Project4Mv311.pdf](https://image.slidesharecdn.com/5b2dd77b-d037-4c14-8812-2713f858453e-170112194854/85/Emeto_Chukwuemeka_7691553_A8-19-320.jpg)