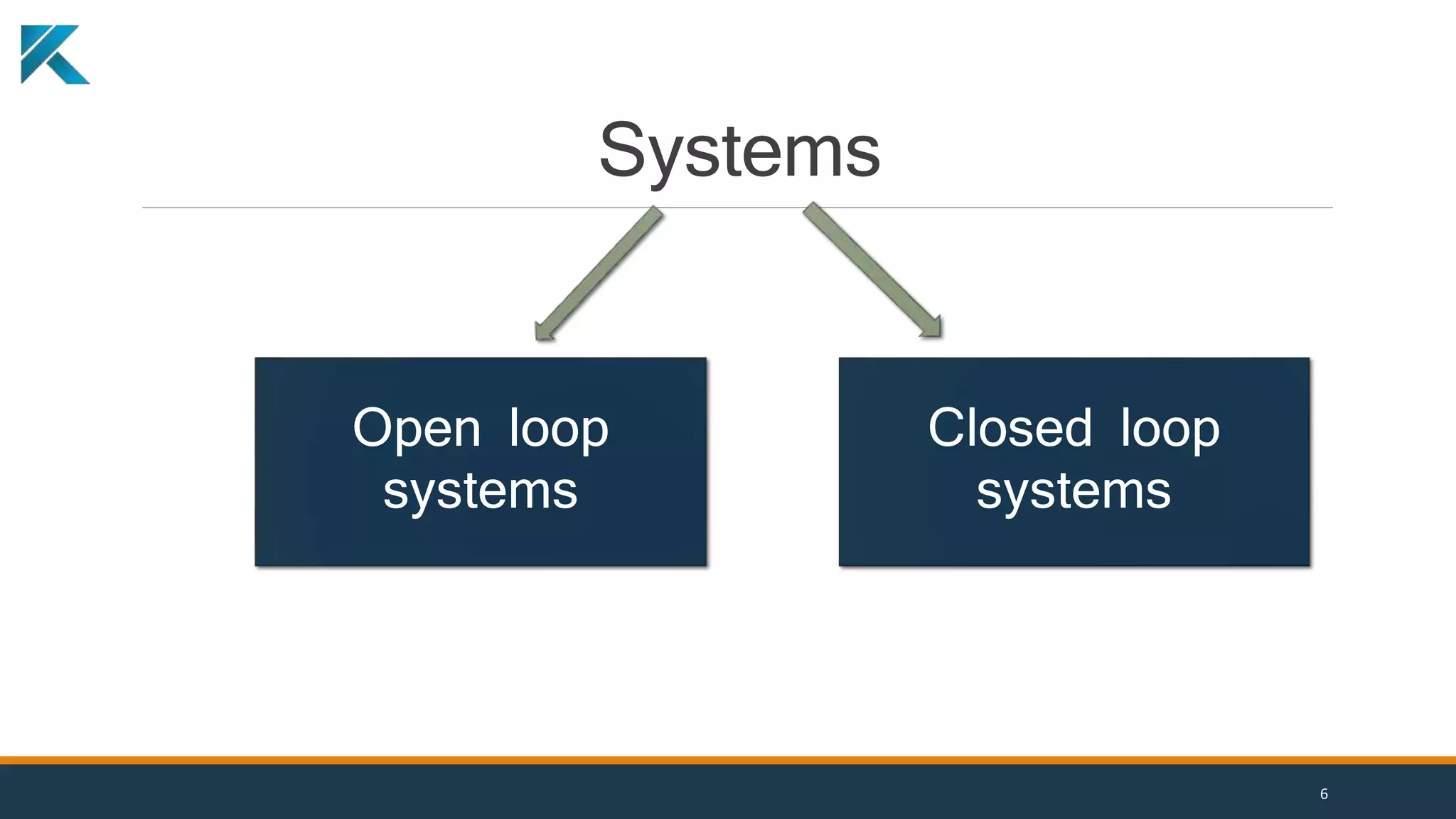
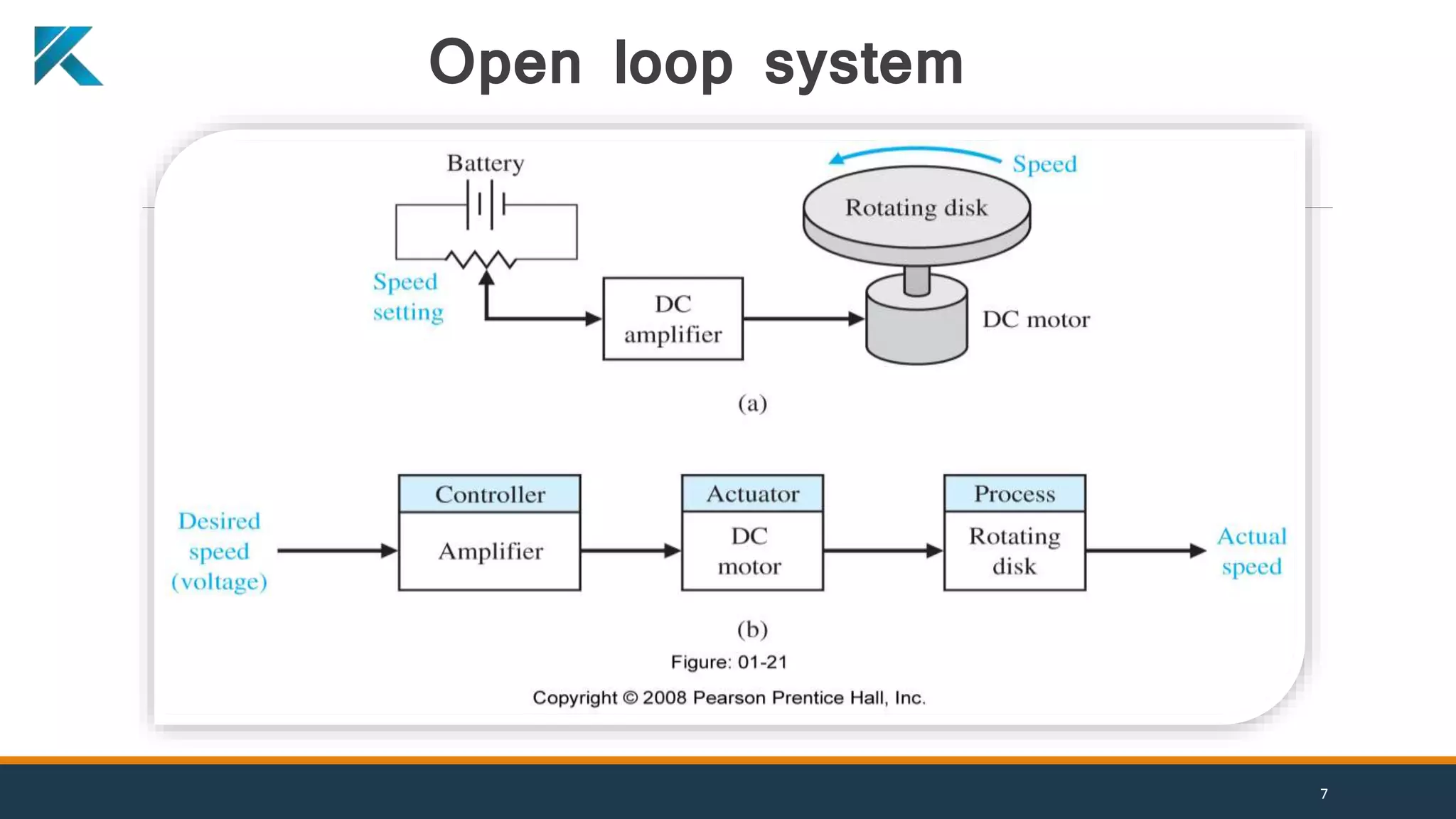
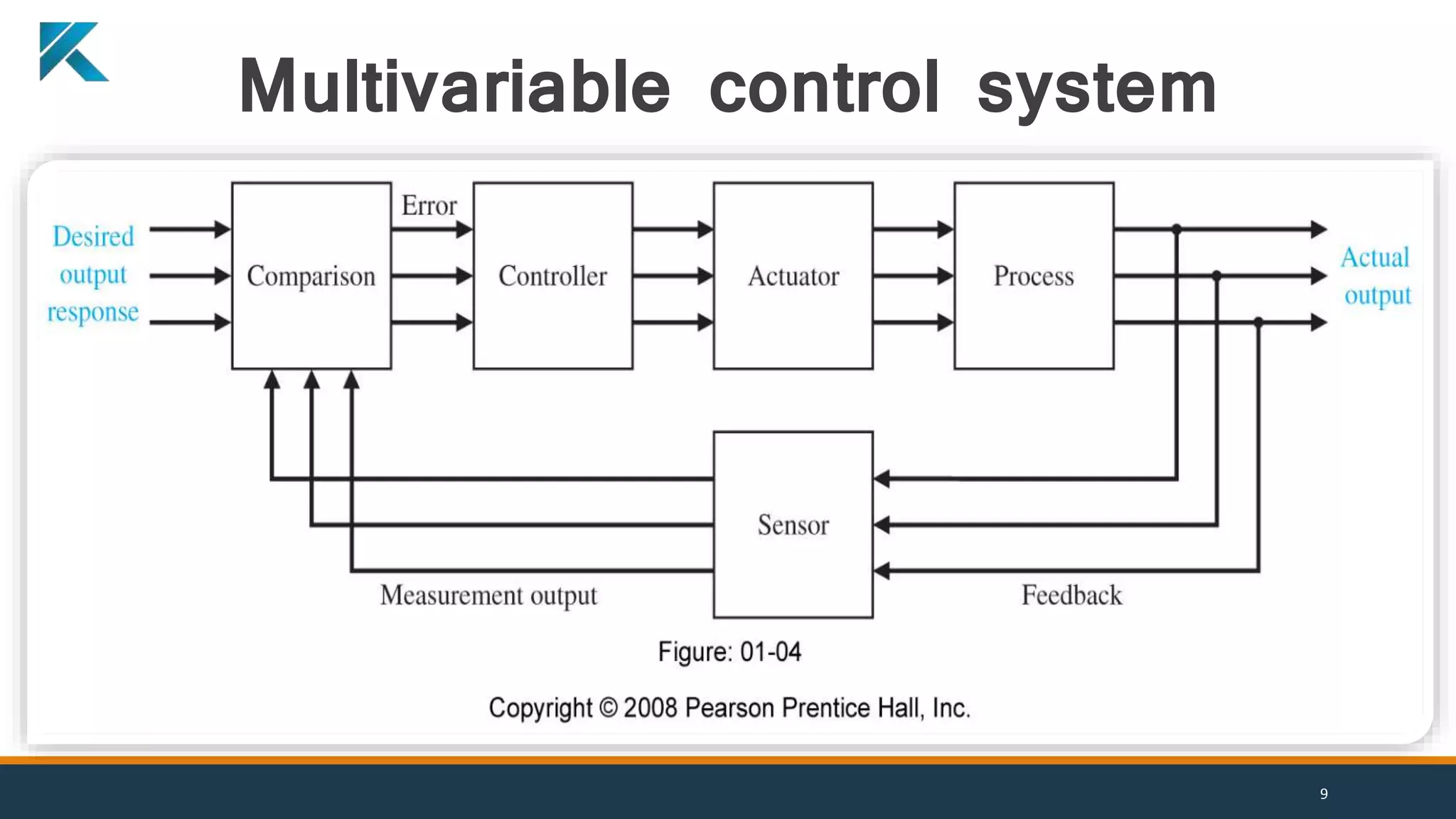
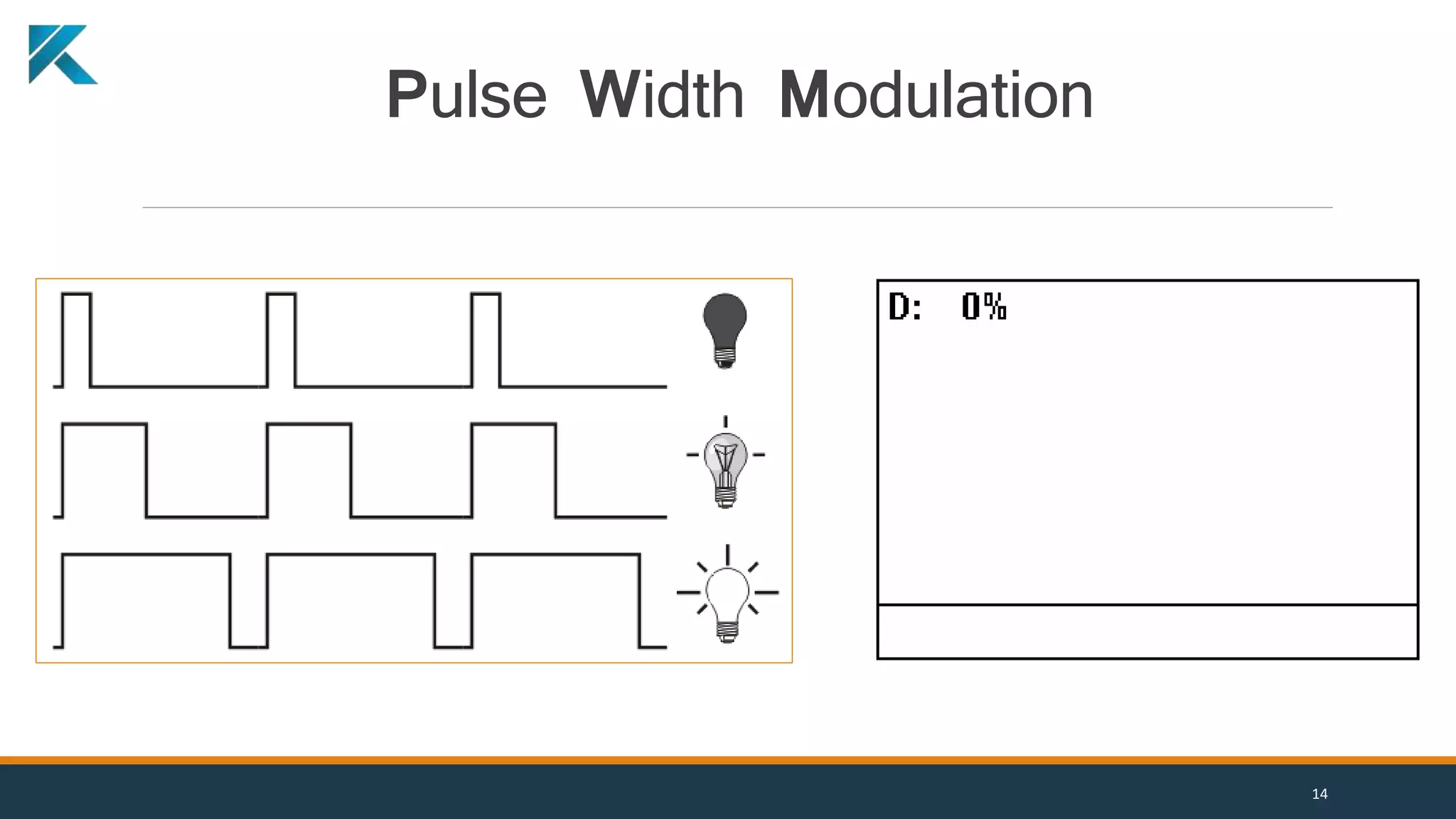
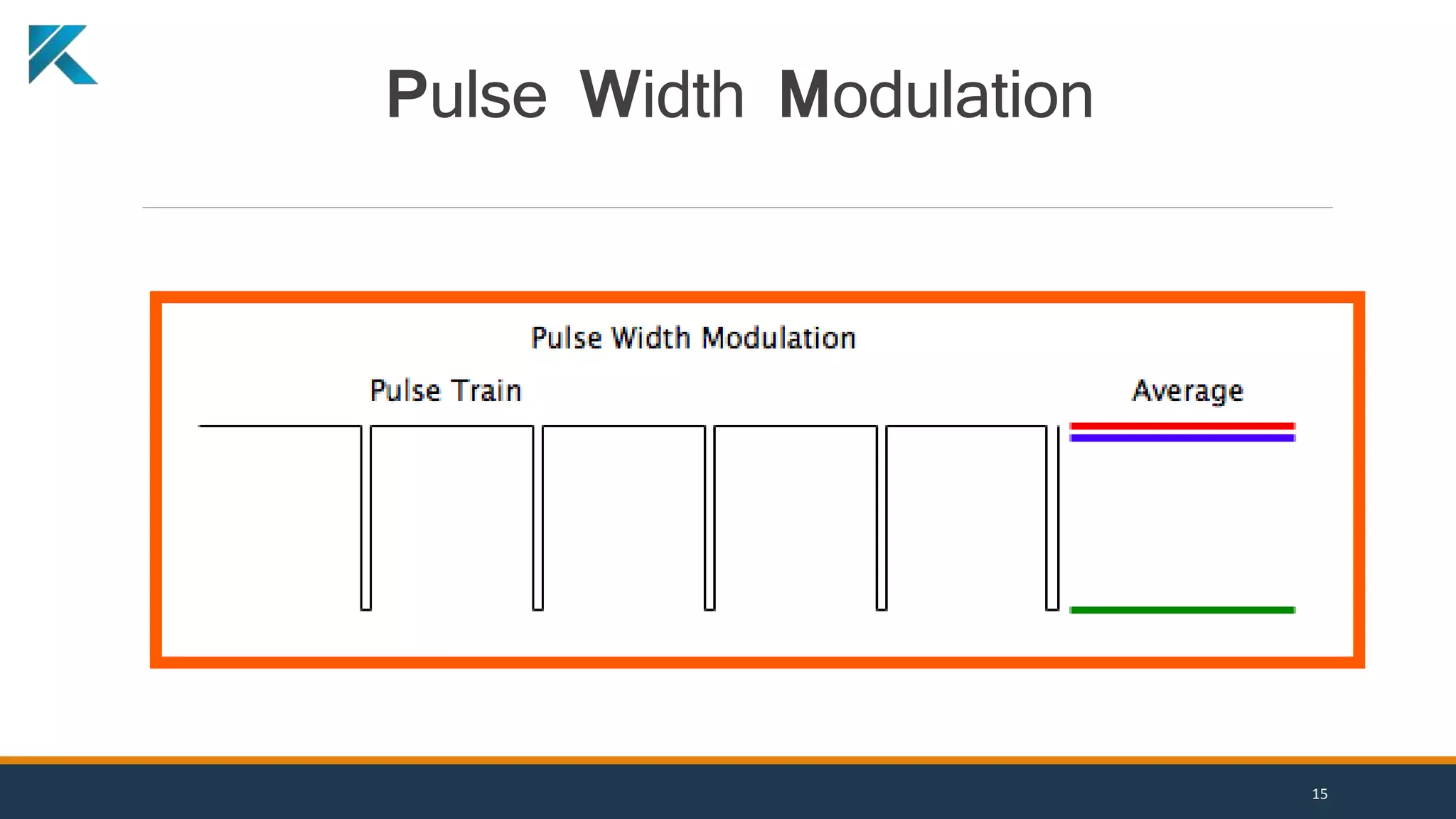
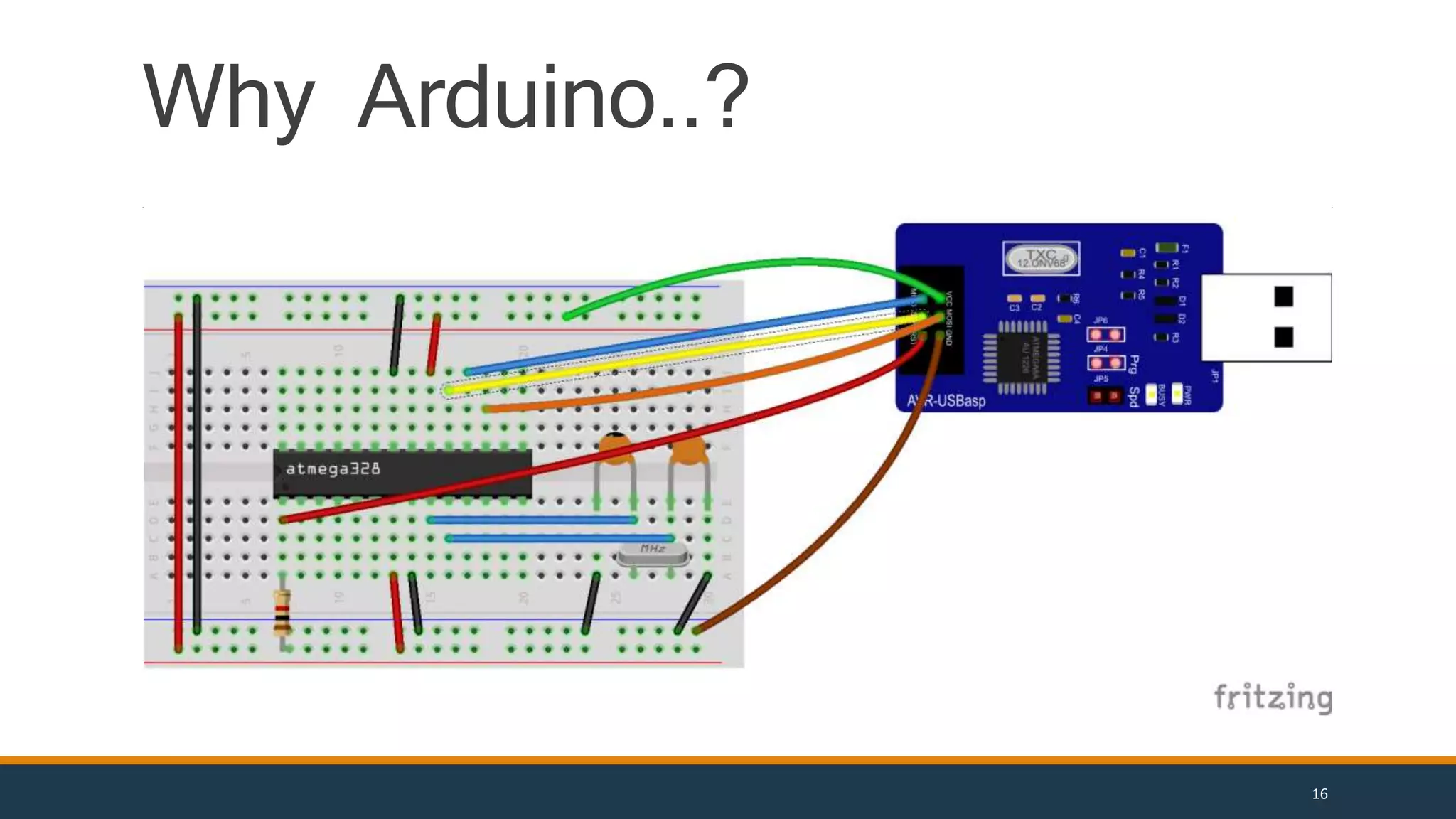
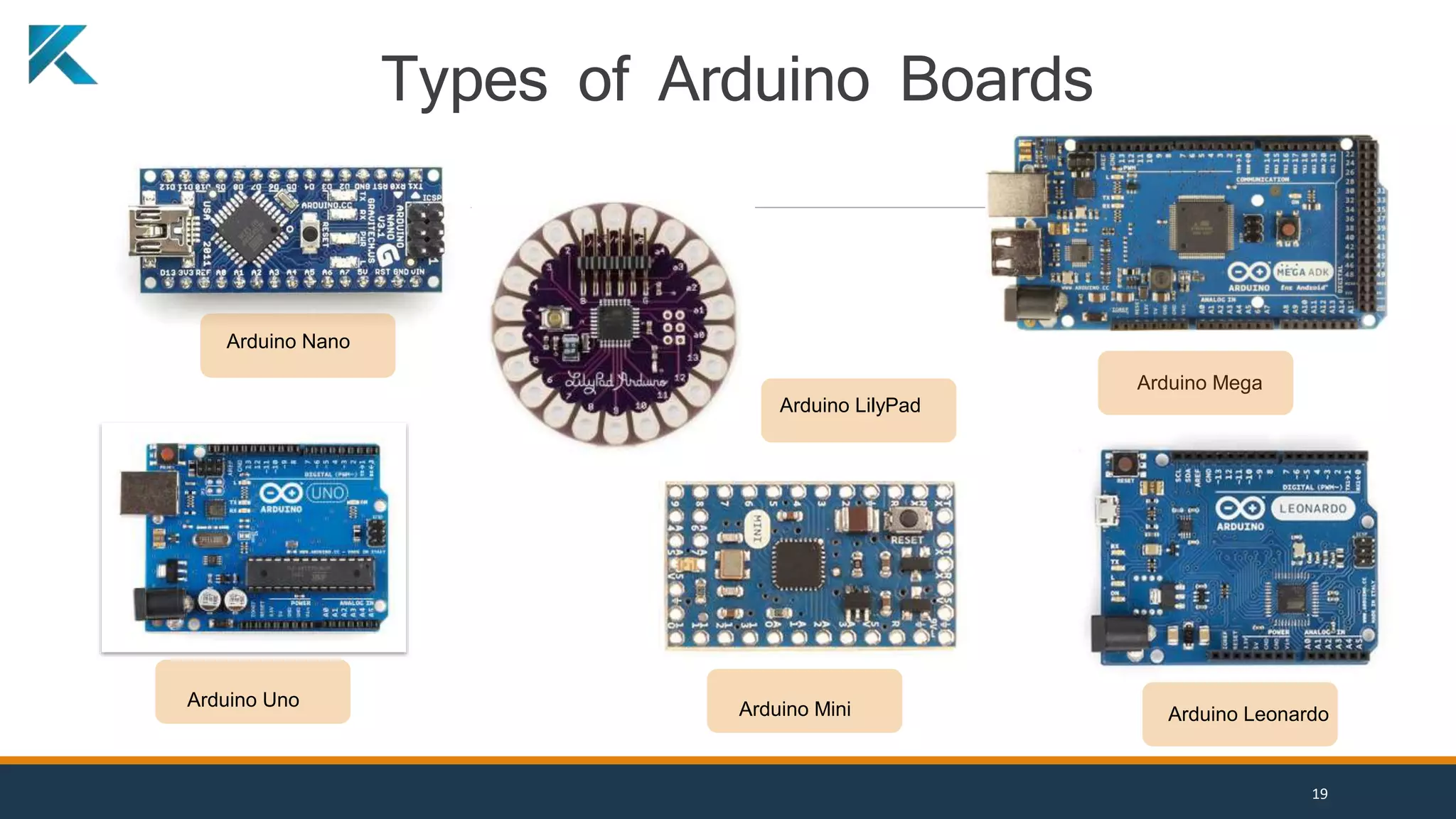
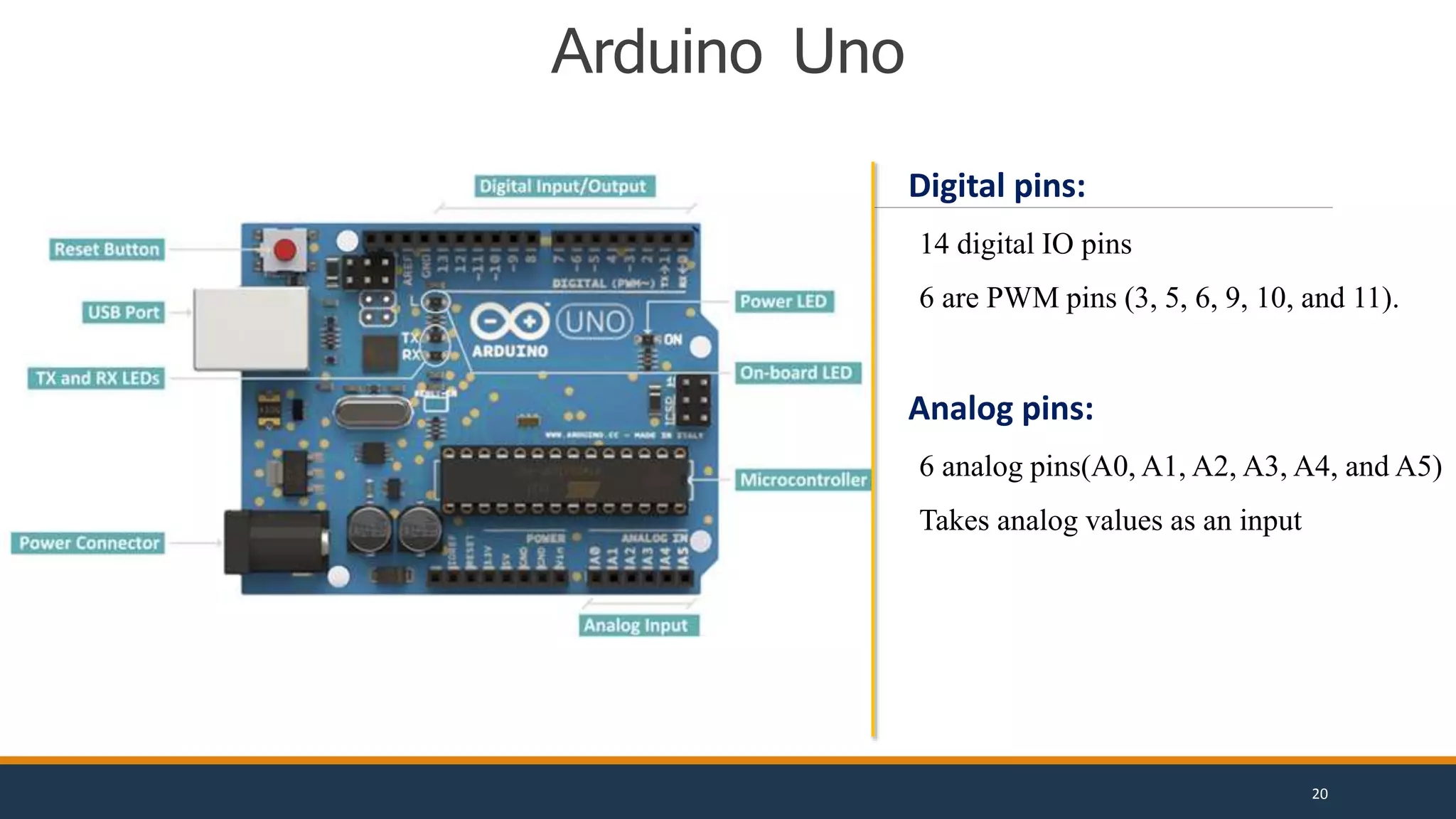
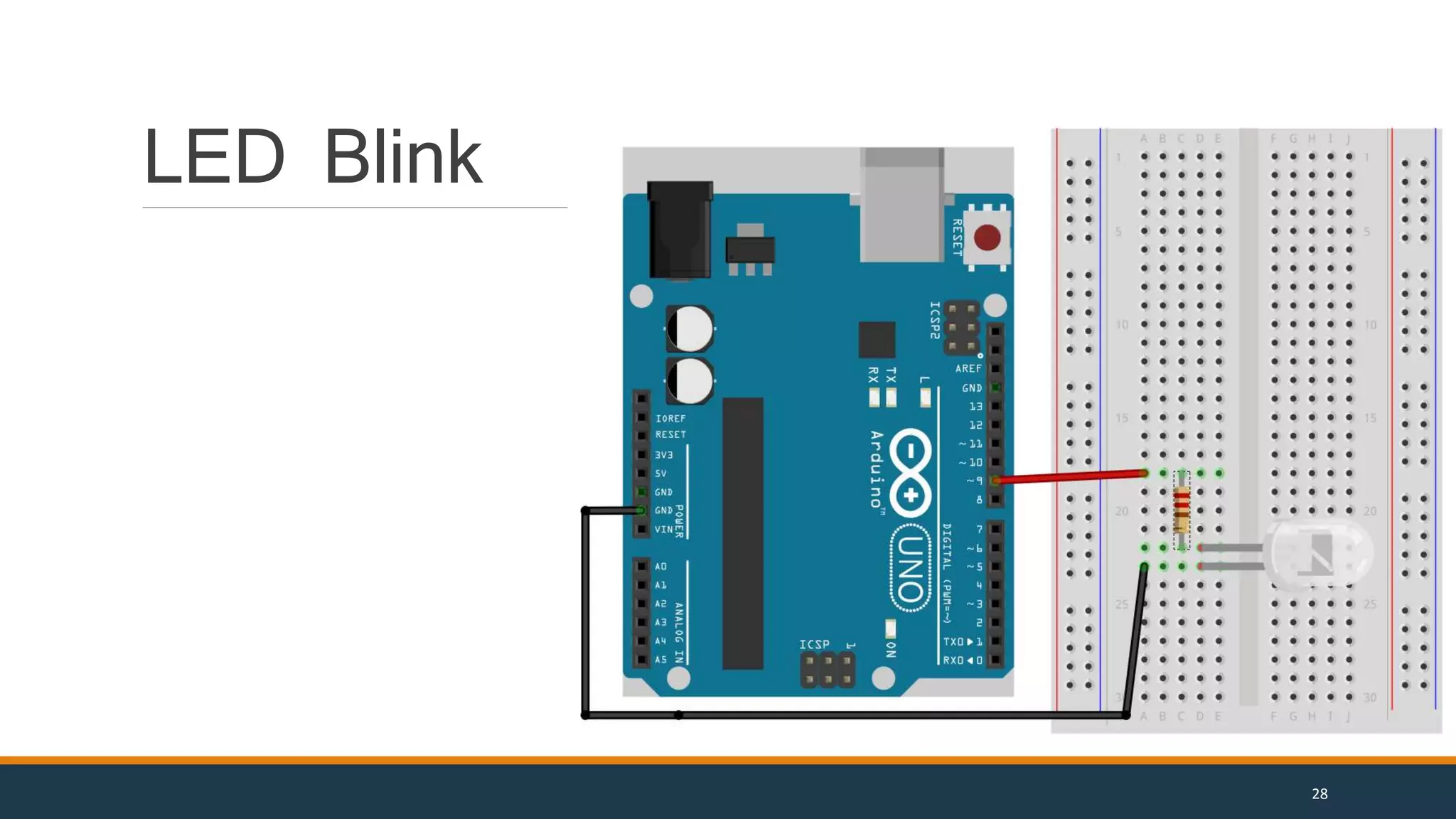
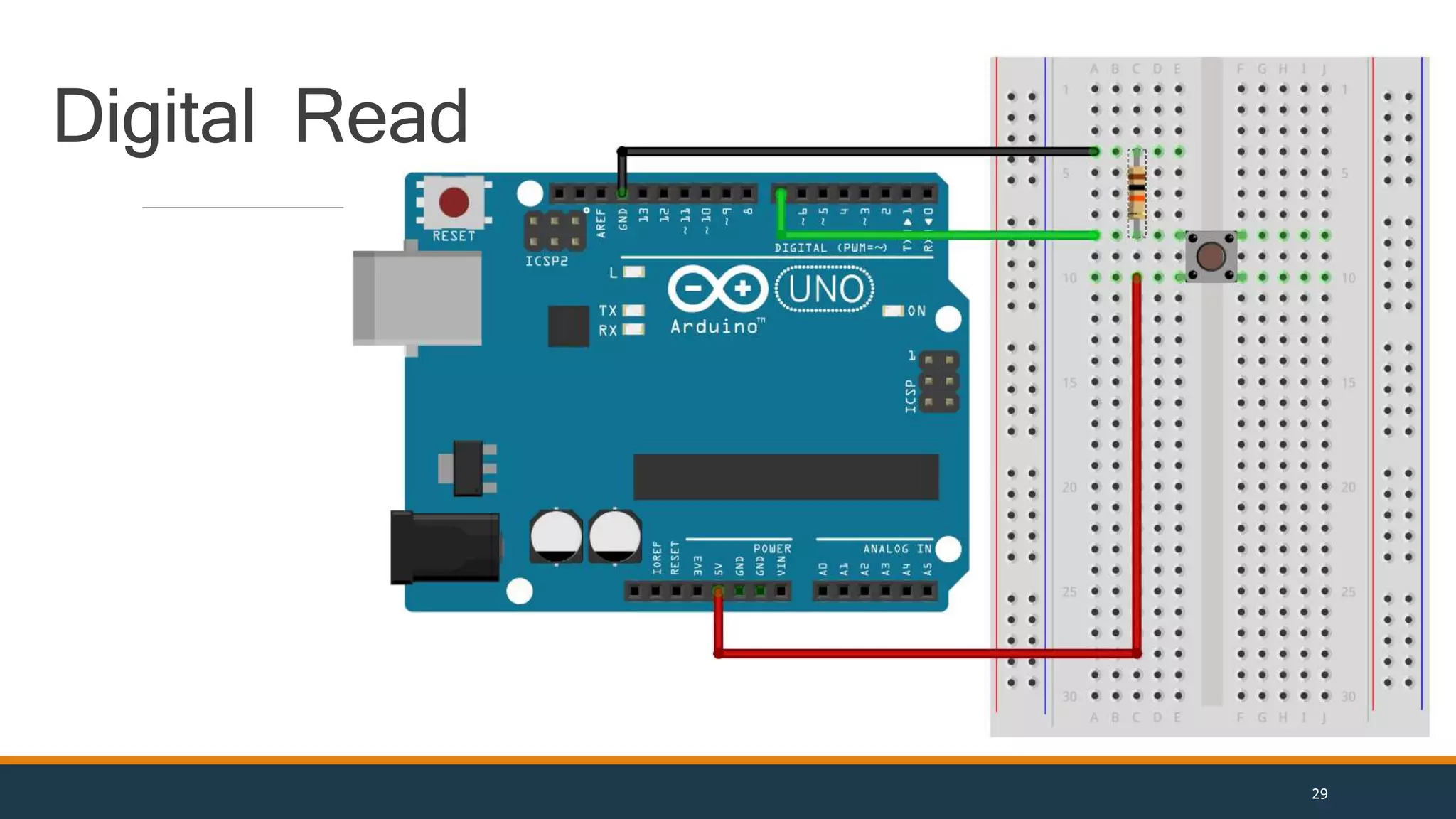
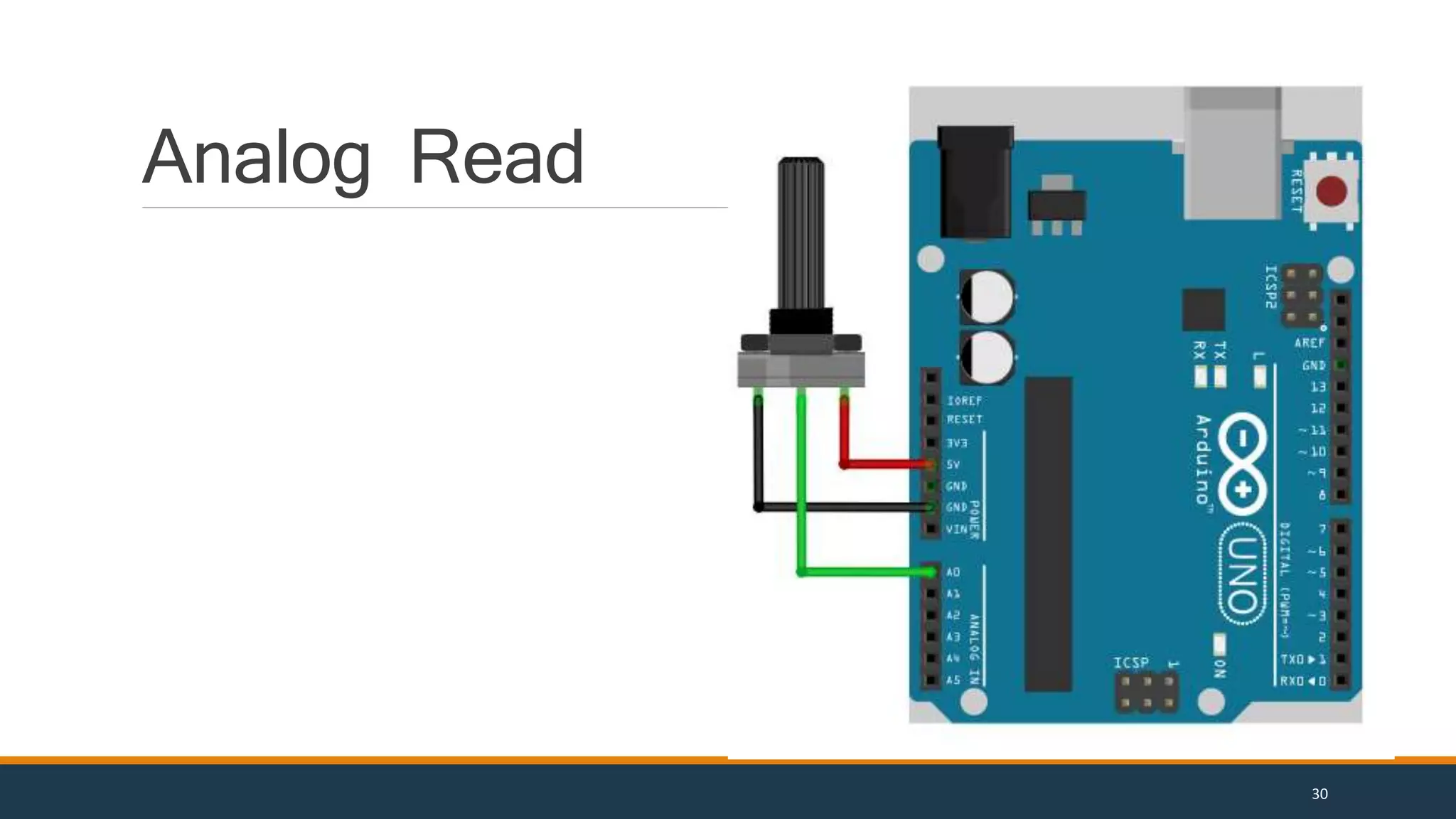
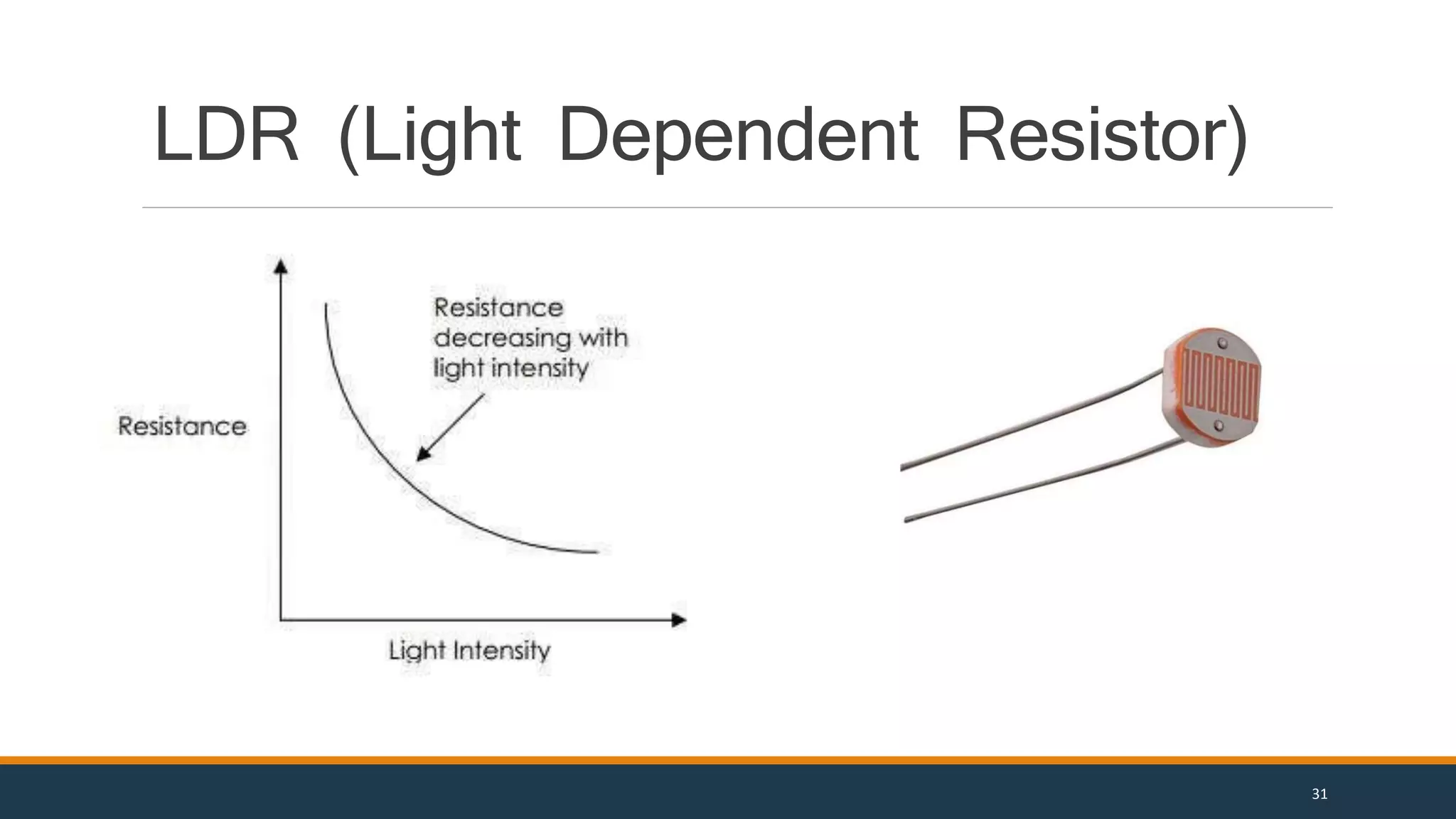
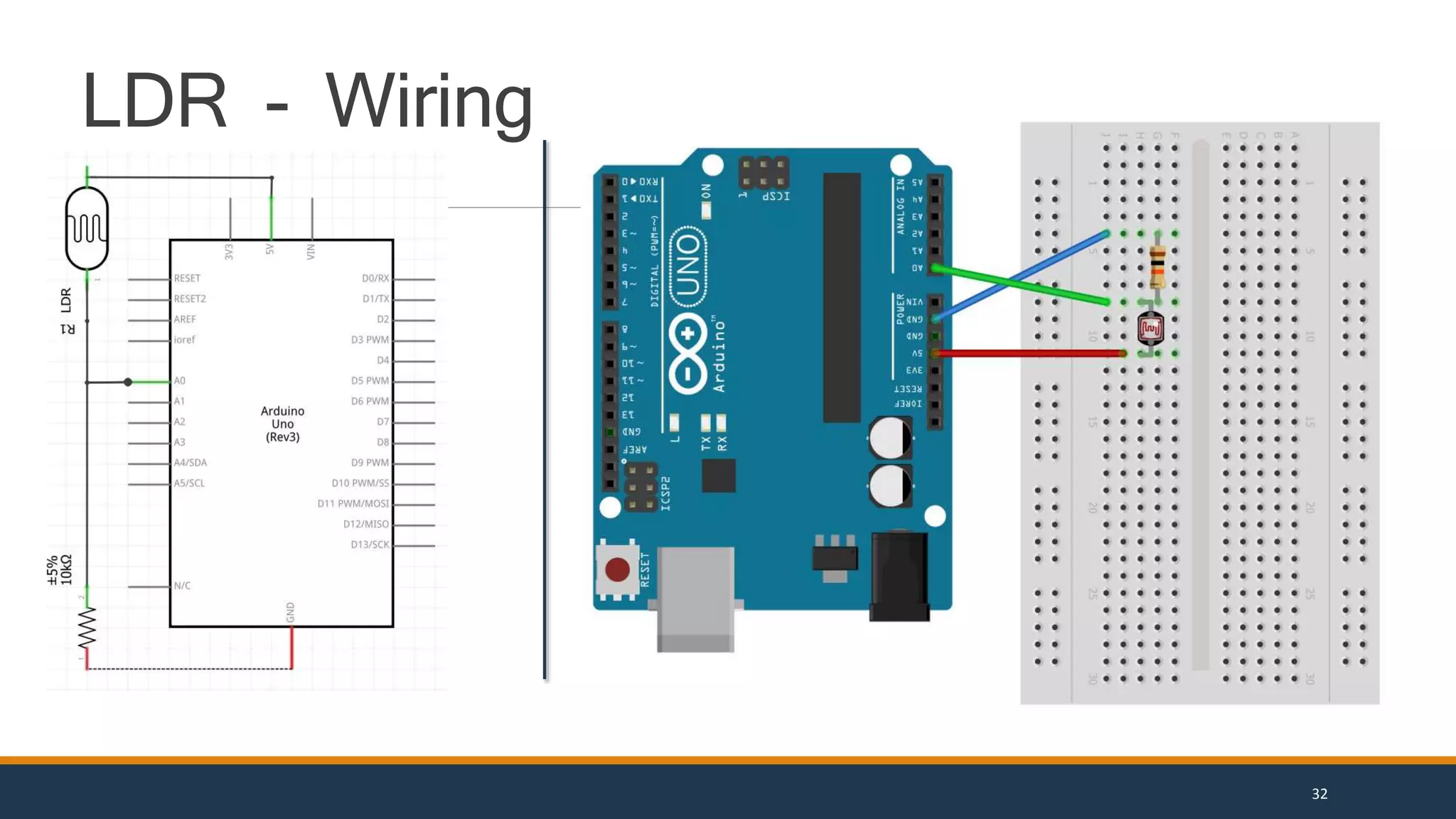
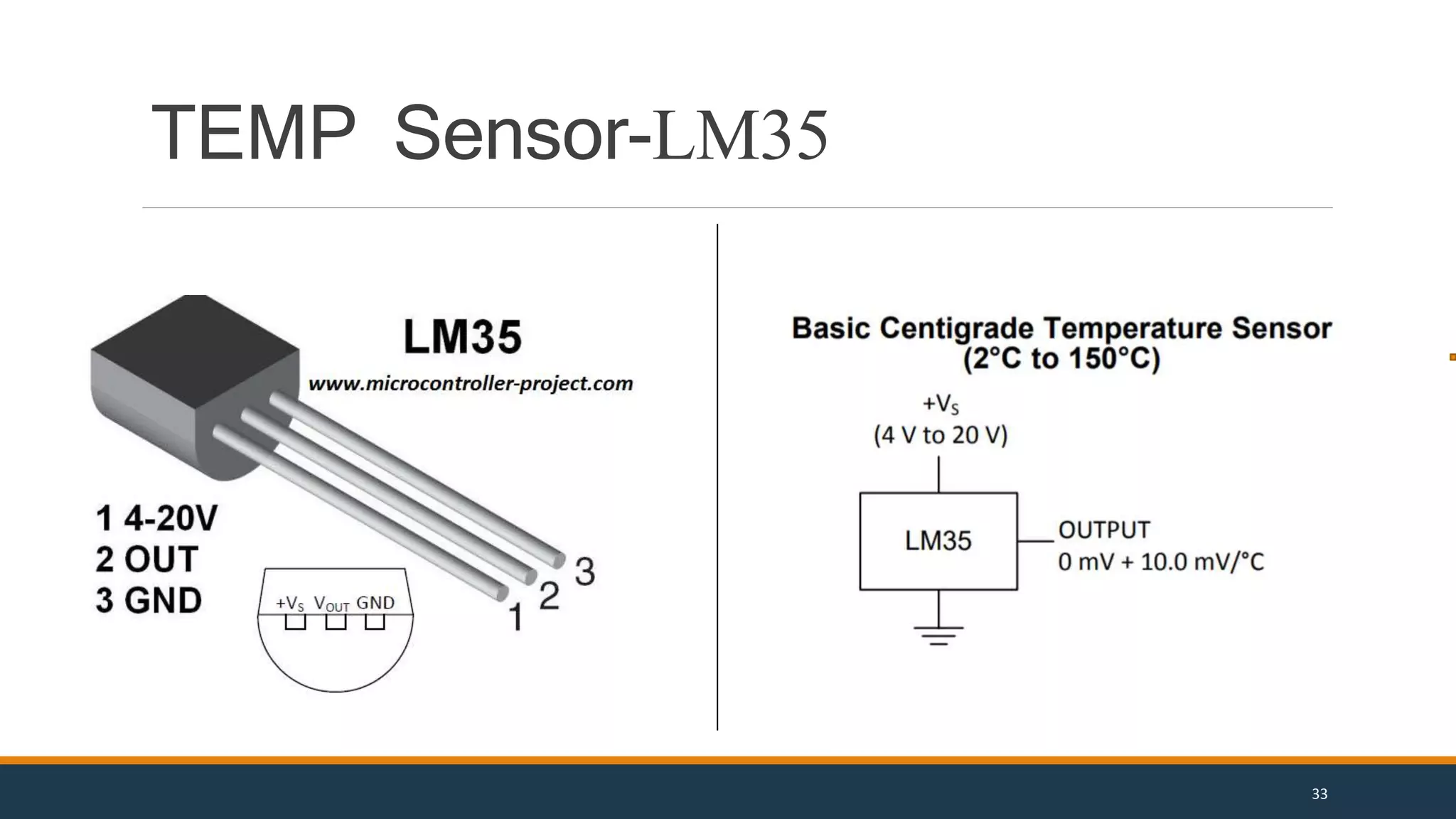
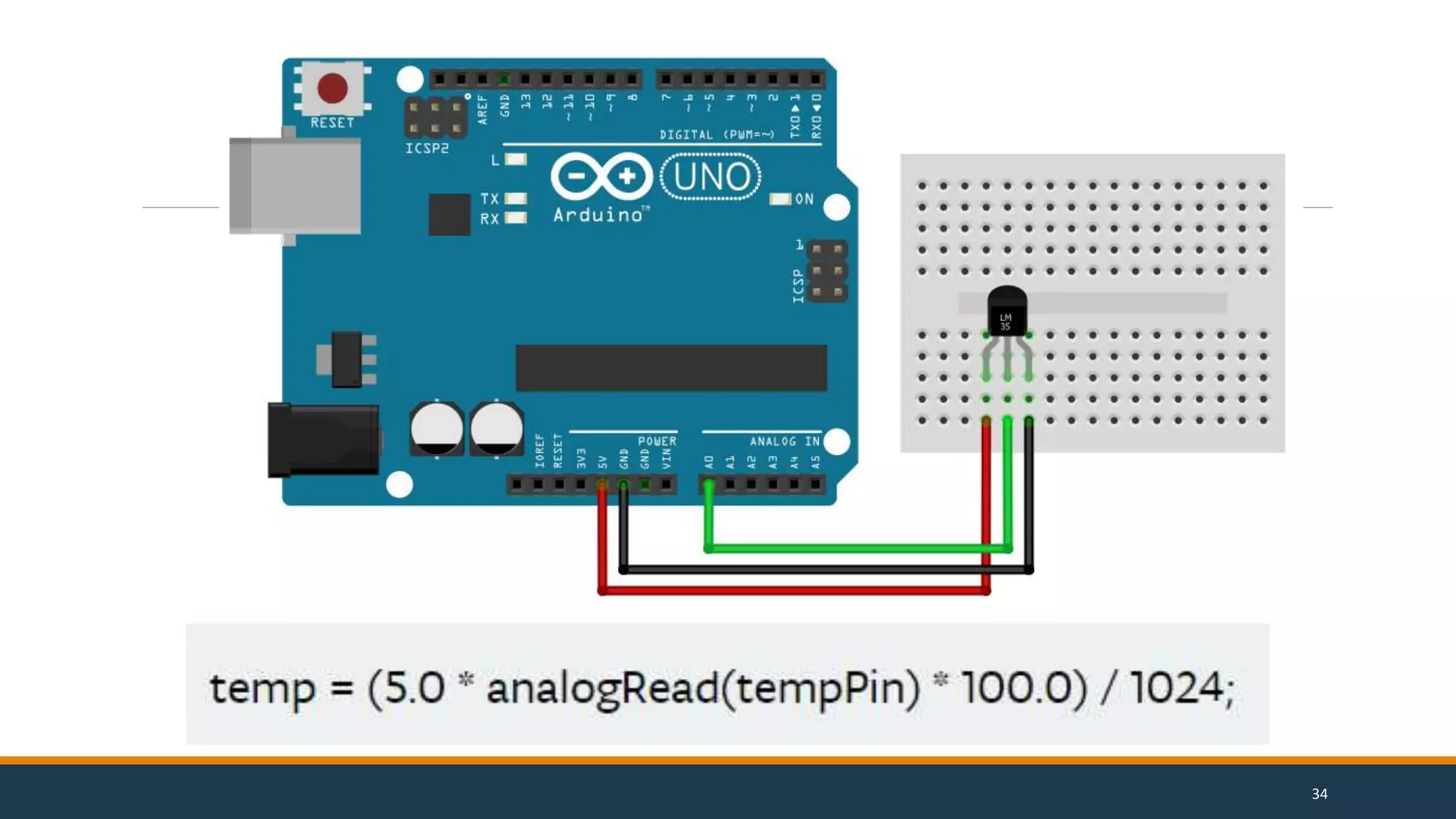
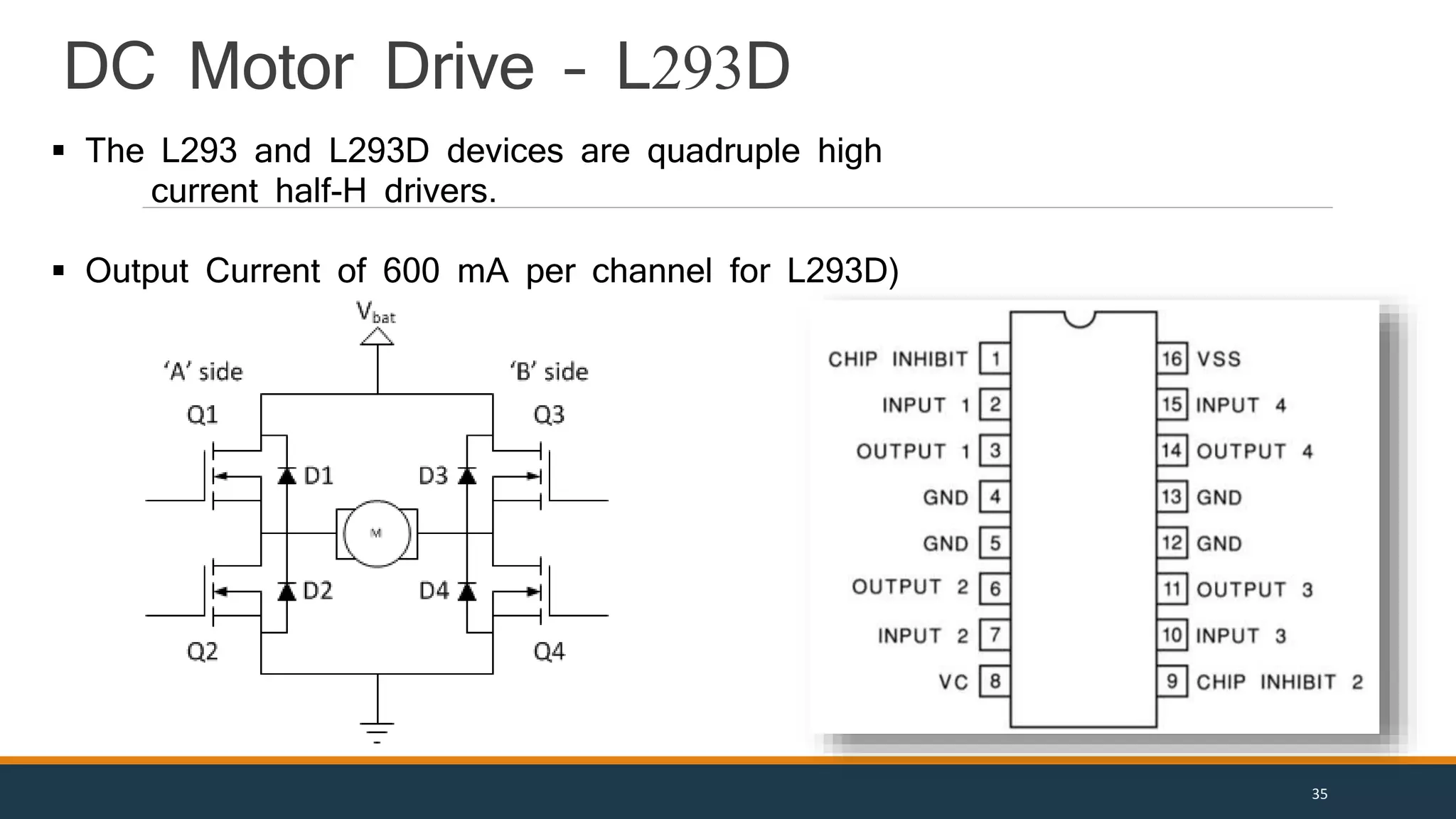
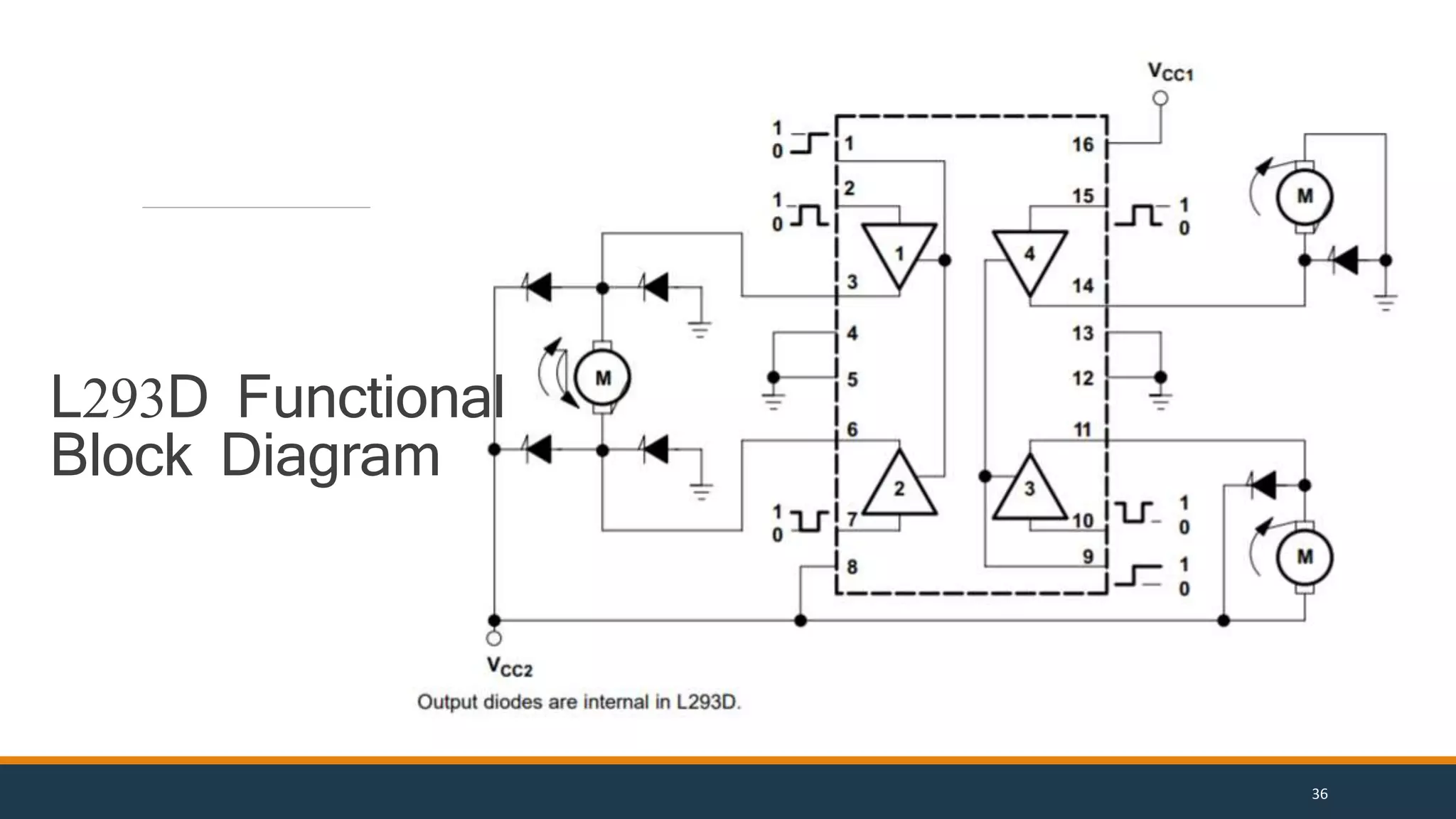
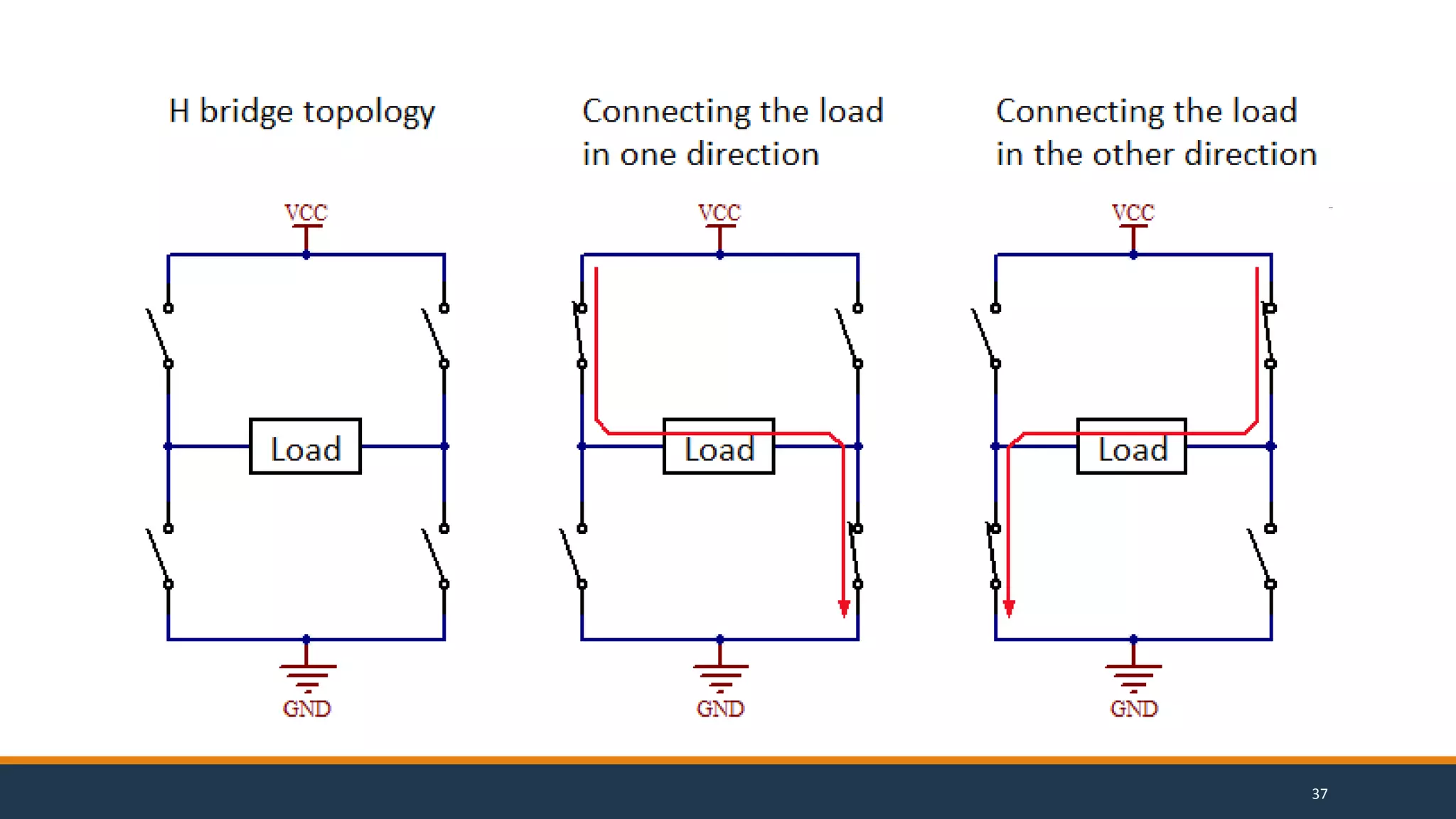
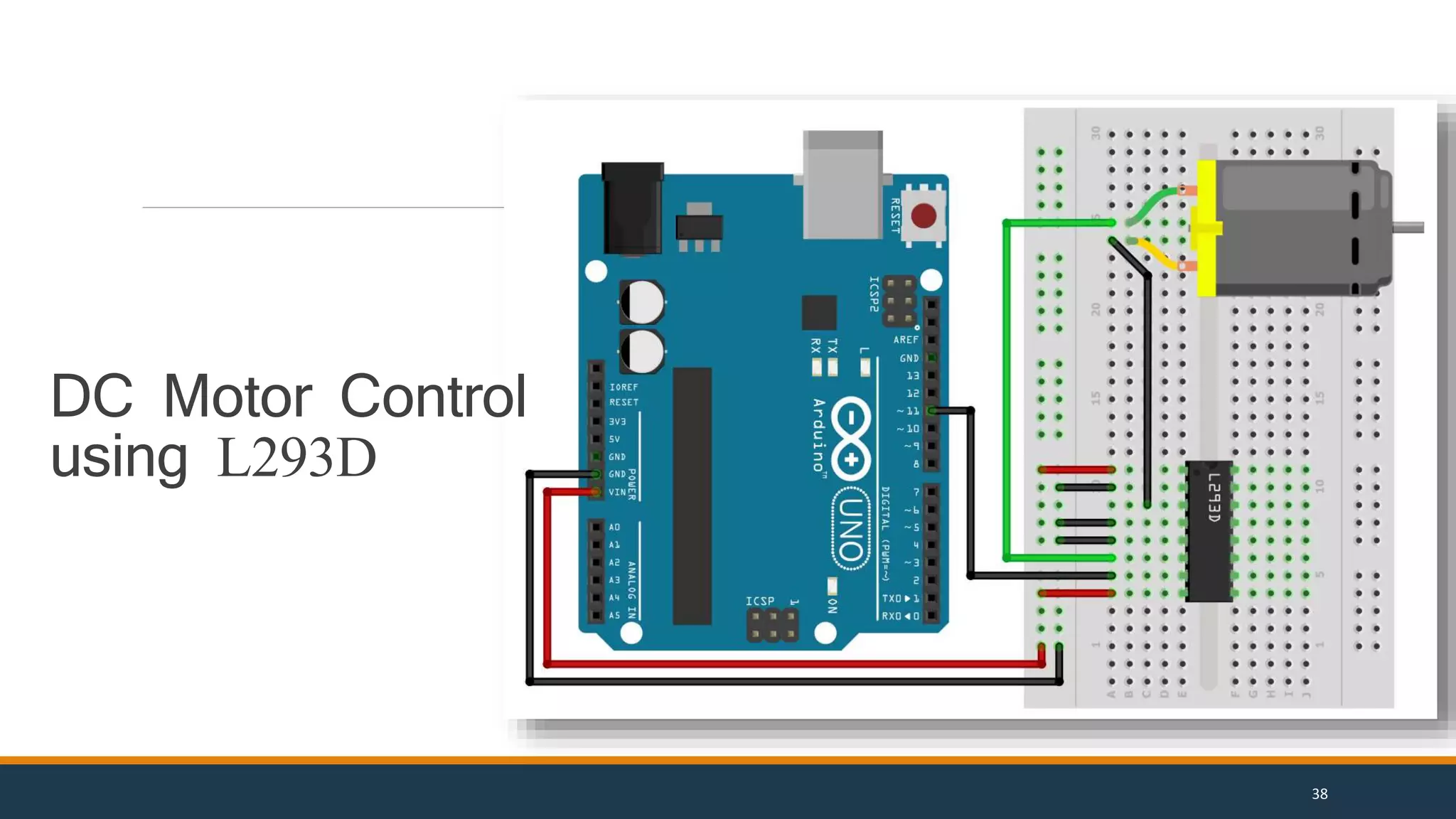
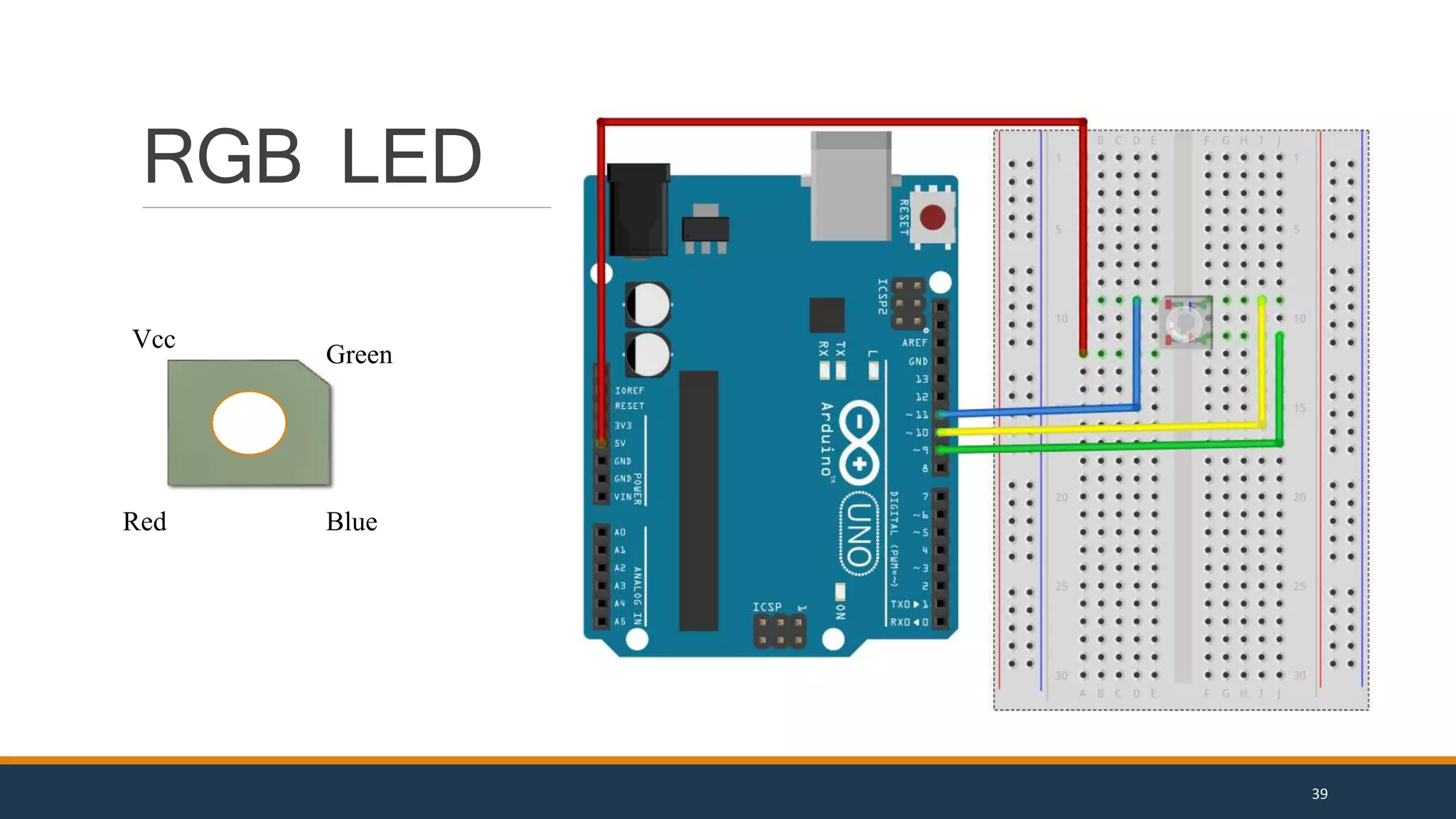
The document provides an overview of a workshop on Arduino embedded development boards. It discusses the Arduino architecture and components, programming fundamentals using the Arduino IDE, and examples of projects including blinking an LED, controlling an RGB LED using PWM, interfacing sensors like light and temperature, and motor speed control. The document explains concepts like open and closed loop control systems, analog and digital signals, and serial communication. It also introduces the Arduino Uno board and shows examples of circuits using components like an L293D motor driver, temperature sensor, and potentiometer.