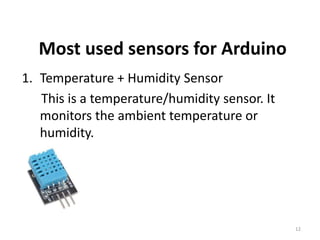
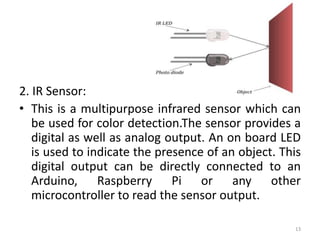
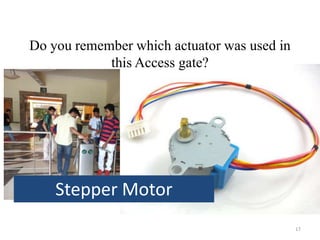
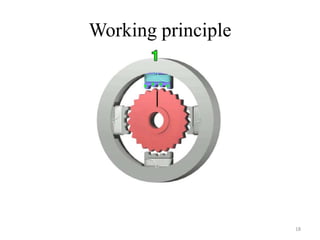
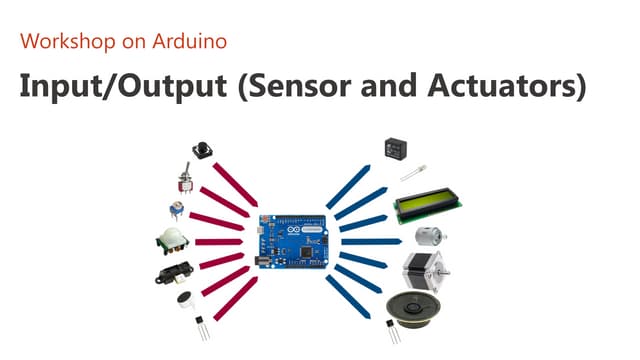
The document discusses keypad and sensor modules for Arduino. It provides code to read input from a 4x4 keypad and display it on the serial monitor. It then defines different sensors like temperature, humidity, and IR sensors. It provides an IR sensor code to detect objects and toggle an LED. It also discusses stepper motors and provides code to control the speed and direction of a stepper motor.
![#include <Keypad.h>
const byte ROWS = 4;
const byte COLS = 4;
char hexaKeys[ROWS][COLS] = {
{'1', '2', '3', 'A'},
{'4', '5', '6', 'B'},
{'7', '8', '9', 'C'},
{'*', '0', '#', 'D'}
};
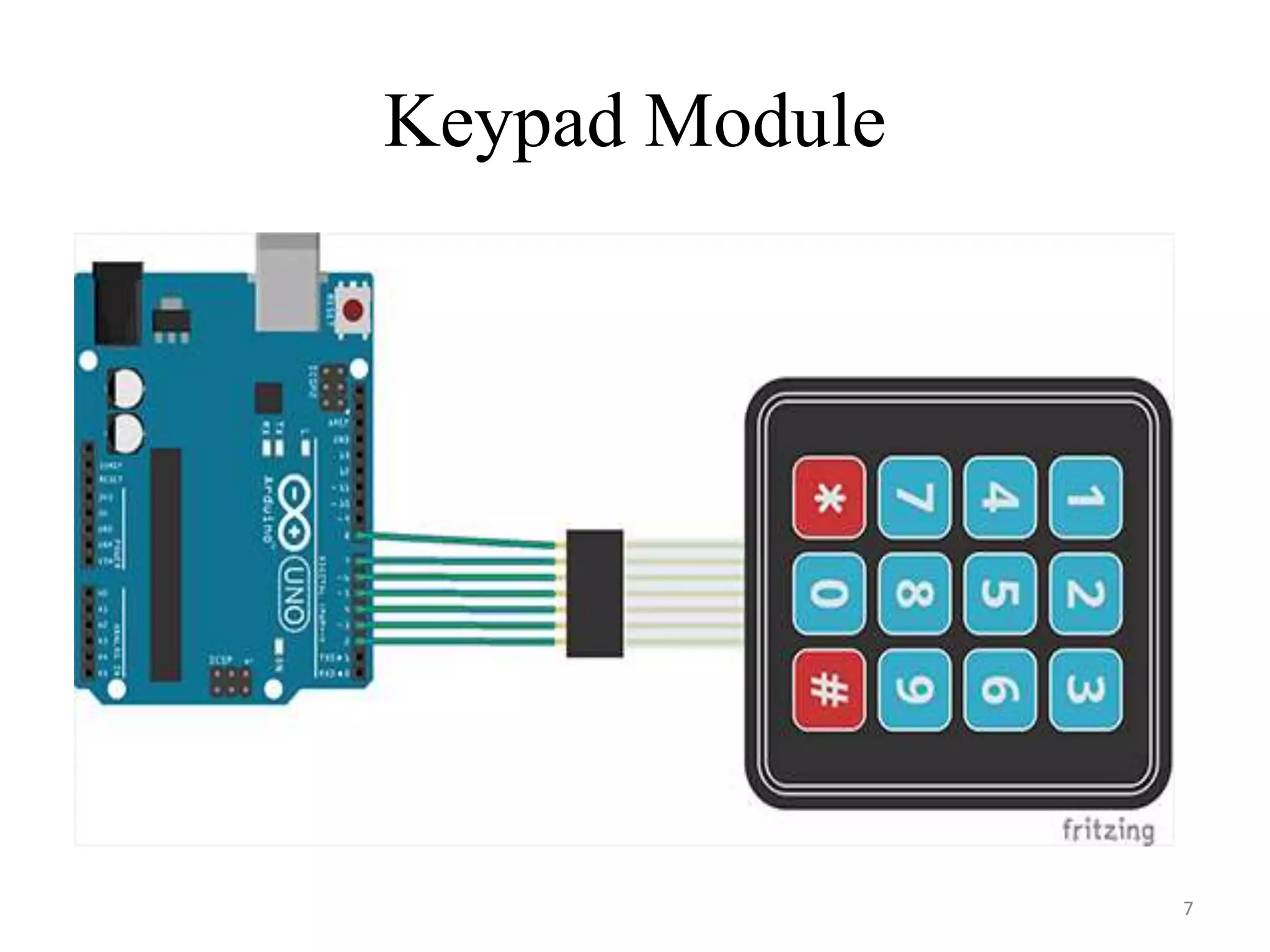
byte rowPins[ROWS] = {9, 8, 7, 6};
byte colPins[COLS] = {5, 4, 3, 2};
9](https://image.slidesharecdn.com/edgeaiassignment3-230510063851-cbae6d35/85/Edge_AI_Assignment_3-pdf-3-320.jpg)