Download to read offline

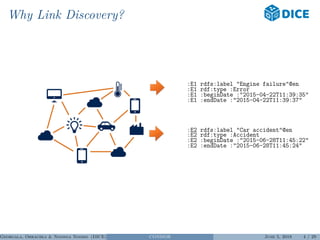
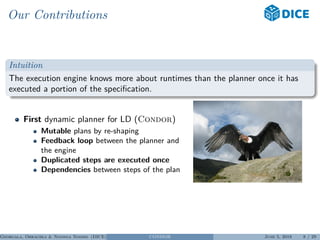
![Declarative Link Discovery
M is difficult to compute directly
compute M = {(s, t) ∈ S × T : σ(s, t) ≥ θ}
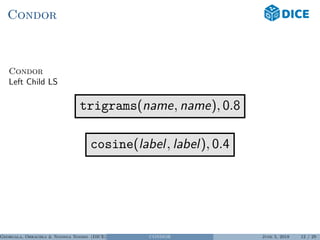
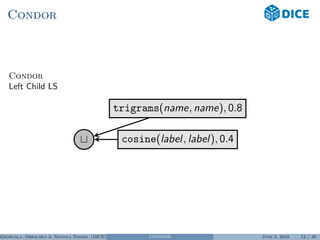
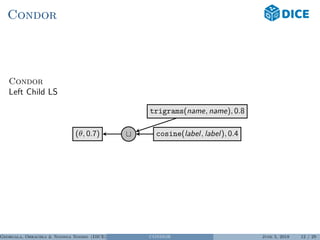
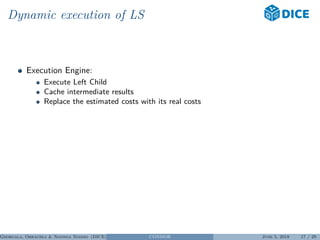
use Link Specification (LS)
describe conditions for which R(s, t) holds
Similarity measure m : S × T → [0, 1]
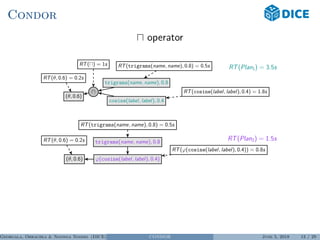
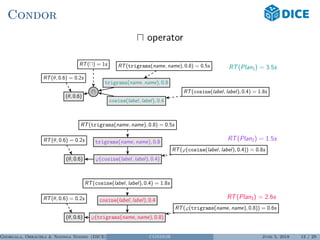
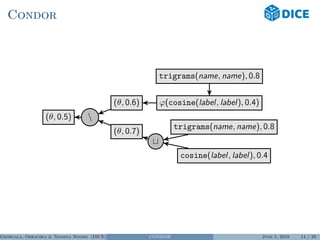
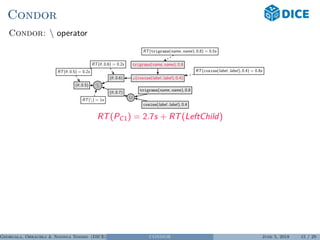
Specification operators op: , ,
Georgala, Obraczka & Ngonga Ngomo (DICE) CONDOR June 5, 2018 6 / 29](https://image.slidesharecdn.com/dynamic-planning-for-link-discovery-eswc2018-180610064237/85/Dynamic-planning-for-link-discovery-ESWC-2018-8-320.jpg)
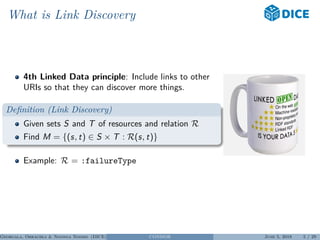
![Declarative Link Discovery
M is difficult to compute directly
compute M = {(s, t) ∈ S × T : σ(s, t) ≥ θ}
use Link Specification (LS)
describe conditions for which R(s, t) holds
Similarity measure m : S × T → [0, 1]
Specification operators op: , ,
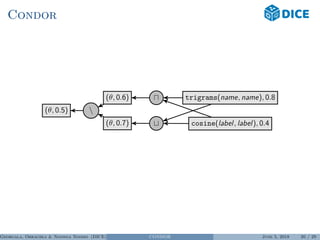
(θ, 0.73) cosine(:label, :label), 0.46
Right Child
Similarity measure:cosine(:label, :label)Threshold:0.46
Atomic LS
trigrams(:type, :type), 0.87
Left Child
Georgala, Obraczka & Ngonga Ngomo (DICE) CONDOR June 5, 2018 6 / 29](https://image.slidesharecdn.com/dynamic-planning-for-link-discovery-eswc2018-180610064237/85/Dynamic-planning-for-link-discovery-ESWC-2018-9-320.jpg)
![Why is it difficult?
Accuracy: correct links
Genetic programming
Refinement operators
. . .
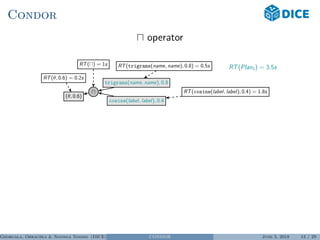
Time efficiency: fast and scalable linking
Runtime reduction of the atomic similarity measures
Planning algorithms (e.g. HELIOS [1])
Use of cost functions to approximate runtime of LS
No exploitation of global knowledge about the LS
Georgala, Obraczka & Ngonga Ngomo (DICE) CONDOR June 5, 2018 7 / 29](https://image.slidesharecdn.com/dynamic-planning-for-link-discovery-eswc2018-180610064237/85/Dynamic-planning-for-link-discovery-ESWC-2018-10-320.jpg)



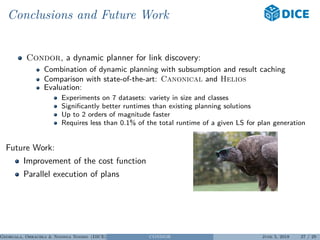

The document discusses a dynamic planning method for link discovery, emphasizing the importance of accurate and efficient computation of resource links. It introduces 'Condor,' an innovative dynamic planner that adapts based on execution feedback, enhancing scalability and effectiveness. The authors detail their approach, including the iterative evaluation and refinement of plans.