This document provides an introduction to discrete-time signals and systems. It defines basic concepts such as discrete-time signals and sequences, basic sequence operations, and common signal types including unit sample, unit step, and periodic sequences. It also introduces discrete-time systems as transformations that map an input sequence to an output sequence. Properties of systems such as linearity, time-invariance, causality, stability, and properties of linear time-invariant (LTI) systems including impulse response and convolution are discussed. The document concludes with examples and end of chapter problems.








![14
Sum of two sequences
Product of two sequences
Multiplication of a sequence by a numberα
Delay (shift) of a sequence
Basic Sequence Operations
]
[
]
[ n
y
n
x
integer
:
]
[
]
[ 0
0 n
n
n
x
n
y
14
]
[
]
[ n
y
n
x
]
[n
x
](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-14-2048.jpg)
![16
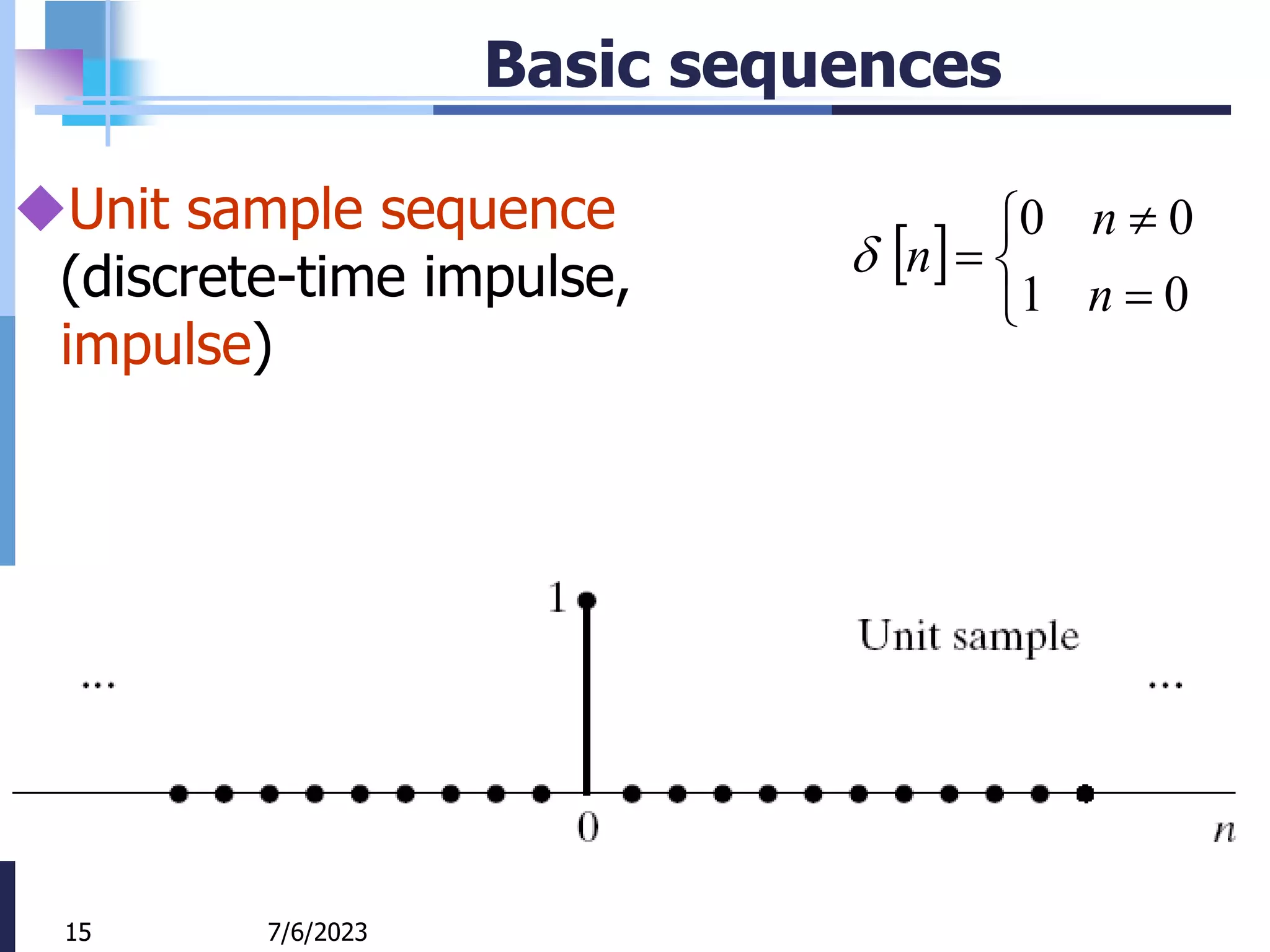
Basic sequences
Unit step sequence
0
0
0
1
]
[
n
n
n
u
7/6/2023
16
n
k
k
n
u
]
[
0
]
[
]
2
[
]
1
[
]
[
]
[
k
k
n
n
n
n
n
u
]
1
[
]
[
]
[
n
u
n
u
n
First backward difference
0, 0 ,
1, 0
0 0
1 0
since
n
k
when n
k
when n
k
k
k
](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-16-2048.jpg)
![17
Basic Sequences
Exponential sequences
n
A
n
x
]
[
7/6/2023
17
A and α are real: x[n] is real
A is positive and 0<α<1, x[n] is positive and
decrease with increasing n
-1<α<0, x[n] alternate in sign, but decrease
in magnitude with increasing n
: x[n] grows in magnitude as n increases
1
](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-17-2048.jpg)
![18
EX. 1 Combining Basic sequences
0
0
0
]
[
n
n
A
n
x
n
7/6/2023
18
If we want an exponential sequences that is
zero for n <0, then
]
[
]
[ n
u
A
n
x n
Cumbersome
simpler](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-18-2048.jpg)
![19
Periodic Sequences
A periodic sequence with integer period N
n
all
for
N
n
x
n
x ]
[
]
[
N
w
n
w
A
n
w
A 0
0
0 cos
cos
7/6/2023
19
integer
,
2
0 is
k
where
k
N
w
0
2 / , integer
N k w where k is
](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-19-2048.jpg)

![21
Discrete-Time System
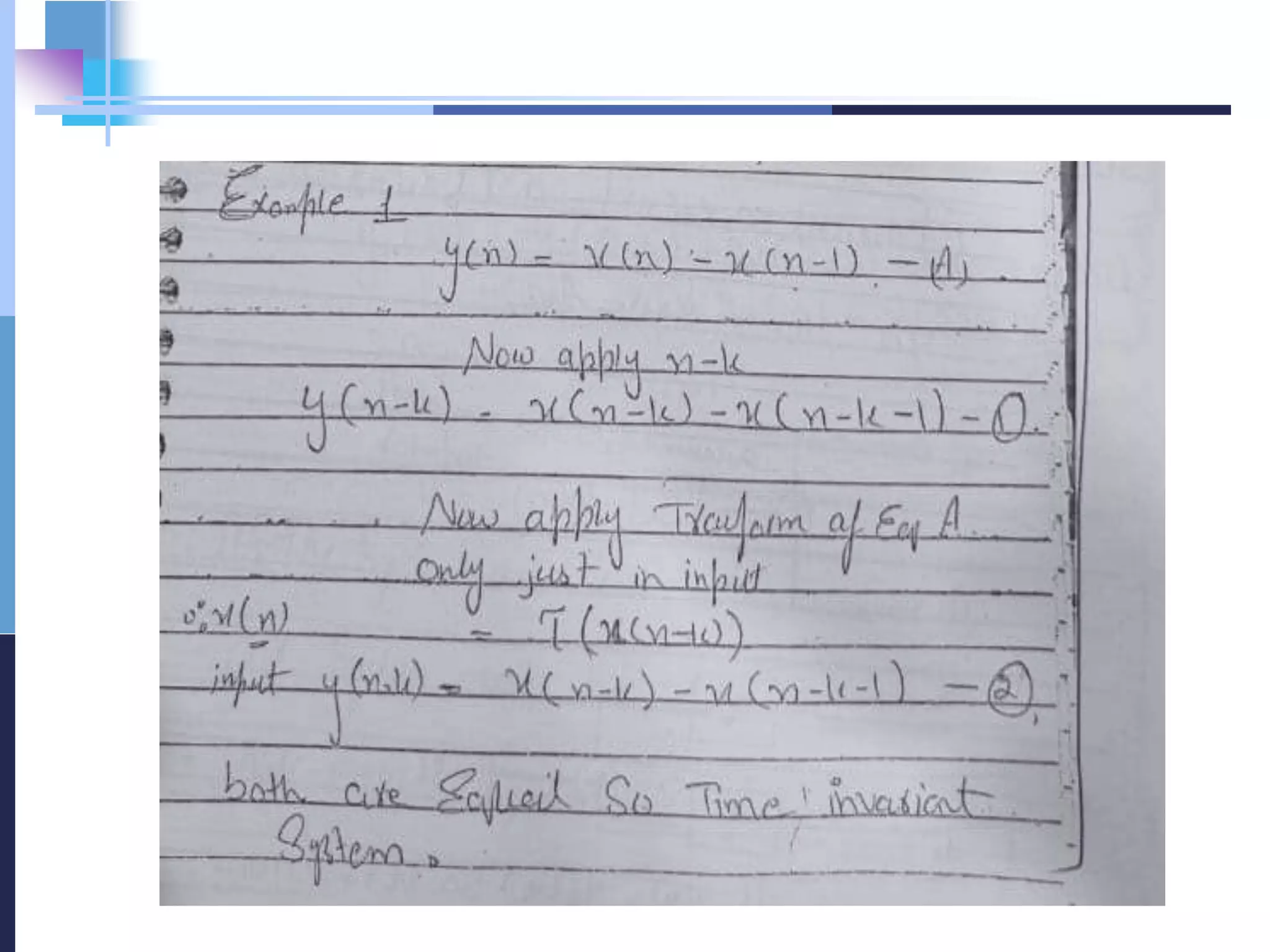
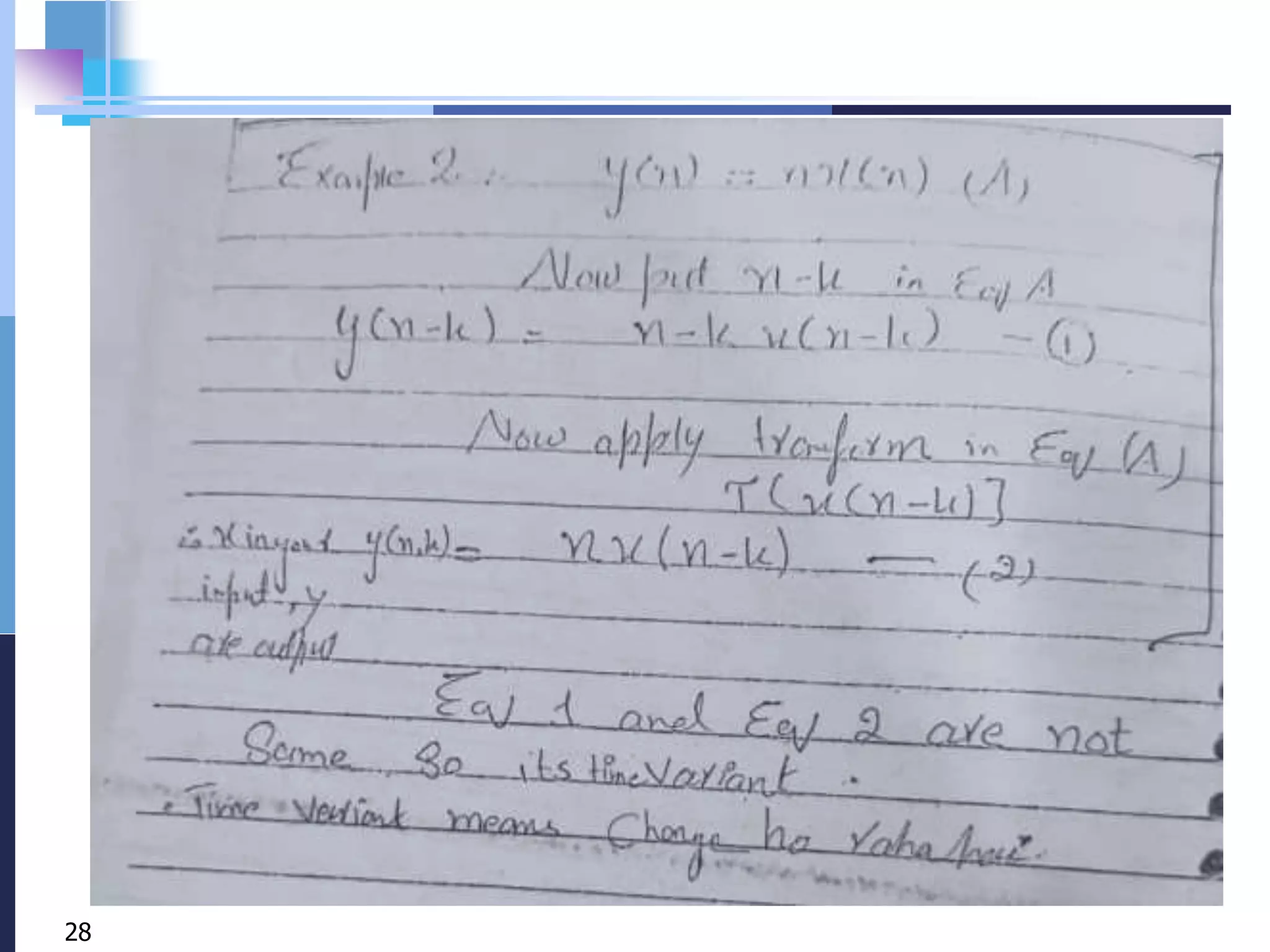
Discrete-Time System is a trasformation
or operator that maps input sequence
x[n] into a unique y[n]
y[n]=T{x[n]}, x[n], y[n]: discrete-time
signal
7/6/2023
21
T{‧}
x[n] y[n]
Discrete-Time System](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-21-2048.jpg)
![22
EX. 5 The Ideal Delay System
n
n
n
x
n
y d ],
[
]
[
7/6/2023
22
If is a positive integer: the delay of the
system. Shift the input sequence to the
right by samples to form the output .
d
n
d
n
If is a negative integer: the system will
shift the input to the left by samples,
corresponding to a time advance.
d
n
d
n](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-22-2048.jpg)


![25
Example Nonlinear Systems
7/6/2023
25
Method: find one counterexample
2
2
2
1
1
1
1
counterexample
2
]
[n
x
n
y
For
]
[
log10 n
x
n
y
1
10
log
1
log
10 10
10
counterexample
For](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-25-2048.jpg)




![33
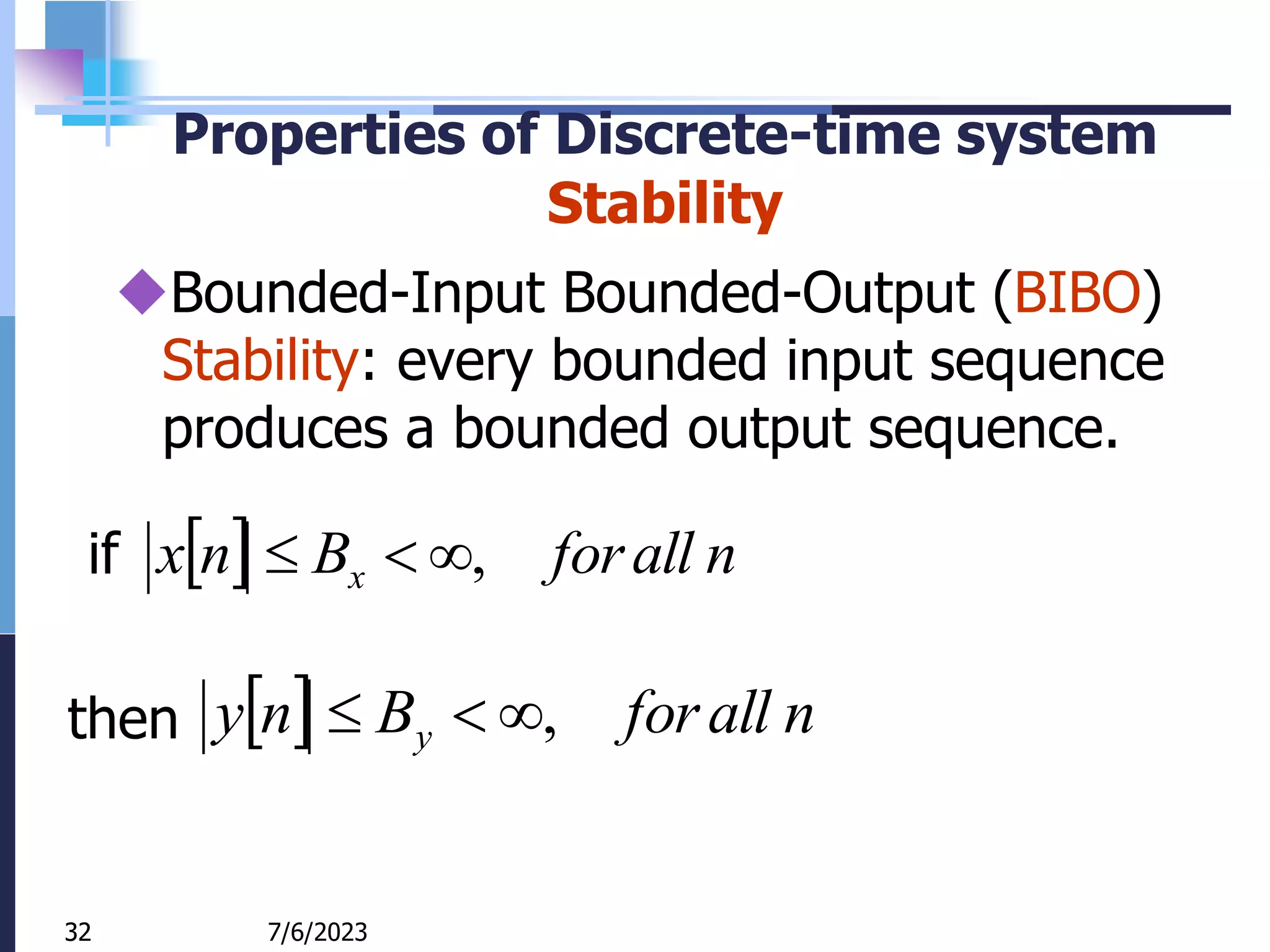
Ex:10 Test for Stability or Instability
2
]
[n
x
n
y
n
all
for
B
n
x x ,
n
all
for
B
B
n
y x
y ,
2
7/6/2023
33
if
then
is stable](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-33-2048.jpg)



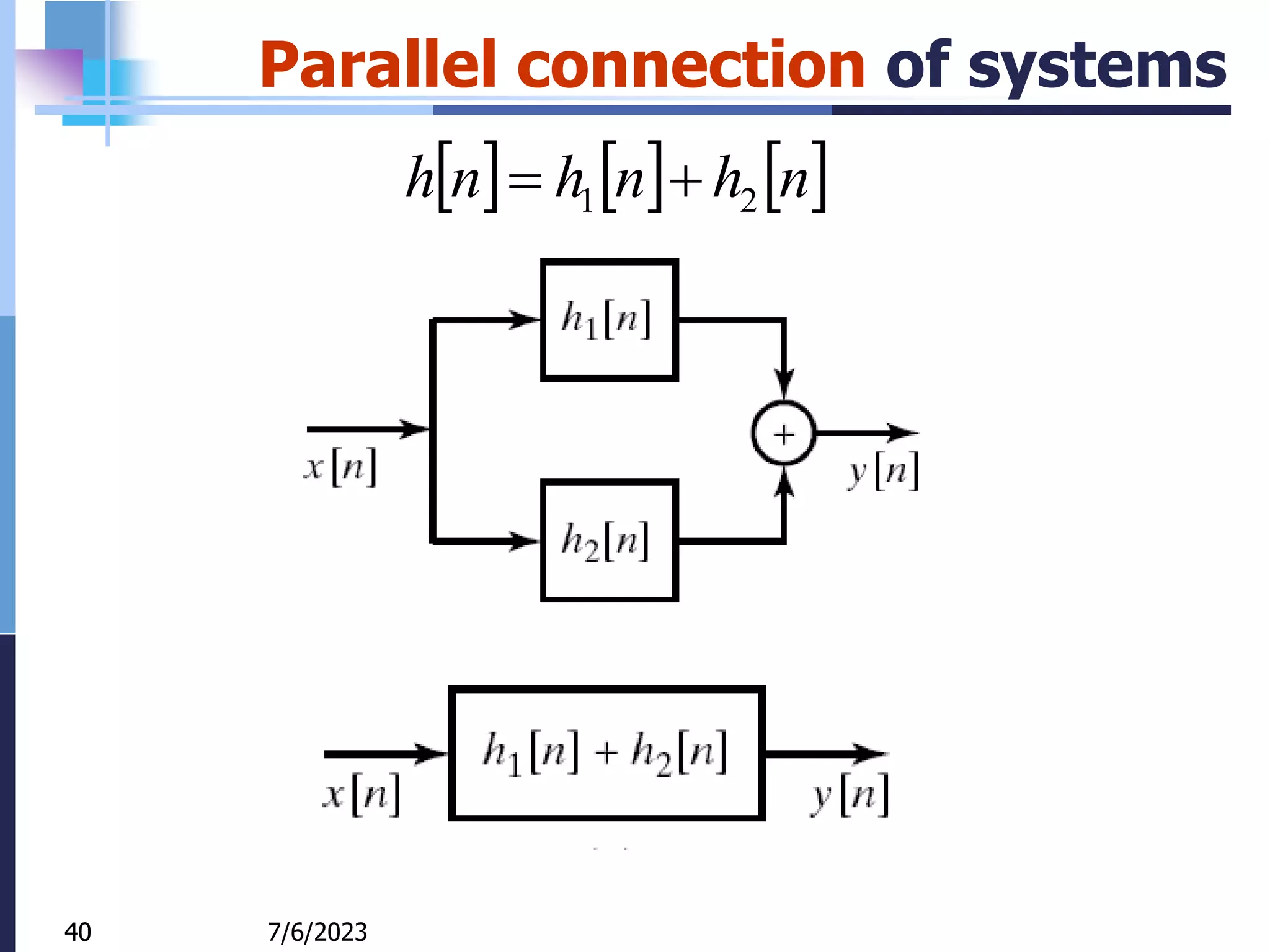
![38
Properties of LTI Systems
Convolution is commutative
n
x
n
h
n
h
n
x
7/6/2023
38
h[n]
x[n] y[n]
x[n]
h[n] y[n]
n
h
n
x
n
h
n
x
n
h
n
h
n
x 2
1
2
1
Convolution is distributed over addition](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-38-2048.jpg)
![39
Cascade connection of systems
n
h
n
h
n
h 2
1
7/6/2023
39
x [n] h1[n] h2[n] y [n]
x [n] h2[n] h1[n] y [n]
x [n] h1[n] ]h2[n] y [n]](https://image.slidesharecdn.com/dsplec1-230706162432-cdc315c3/75/DSP-Lec-1-ppt-39-2048.jpg)










![Digital Signal Processing[ECEG-3171]-Ch1_L03](https://cdn.slidesharecdn.com/ss_thumbnails/dspl3-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)