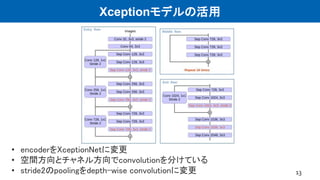
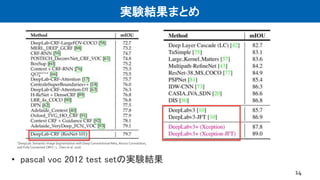
実験結果まとめ
• pascal voc2012 test setの実験結果
14
“DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution,
and Fully Connected CRFs”, L. Chen et al. 2016
参考文献
• “Encoder-Decoder withAtrous Separable Convolution for Semantic Image
Segmentation”, L. Chen et al. 2018
• “DeepLab: Semantic Image Segmentation with Deep Convolutional Nets,
Atrous Convolution, and Fully Connected CRFs”, L. Chen et al. 2016
• “Spatial Pyramid Pooling in Deep Convolutional Networks for Visual
Recognition”, K. He et al. 2014
• F. Chollet. Xception: Deep learning with depthwise separable convolutions.
In CVPR, 2017.
16
![1
DEEP LEARNING JP
[DL Papers]
http://deeplearning.jp/
“Encoder-Decoder with Atrous Separable Convolution for
Semantic Image Segmentation”
土居健人, 航空宇宙工学科岩崎研](https://image.slidesharecdn.com/deeplabv3-180309001425/85/DL-Encoder-Decoder-with-Atrous-Separable-Convolution-for-Semantic-Image-Segmentation-1-320.jpg)
![1
DEEP LEARNING JP
[DL Papers]
http://deeplearning.jp/
“Encoder-Decoder with Atrous Separable Convolution for
Semantic Image Segmentation”
土居健人, 航空宇宙工学科岩崎研](https://image.slidesharecdn.com/deeplabv3-180309001425/75/DL-Encoder-Decoder-with-Atrous-Separable-Convolution-for-Semantic-Image-Segmentation-1-2048.jpg)










![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision](https://cdn.slidesharecdn.com/ss_thumbnails/dlkobayashi0115-210115012308-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Deep High-Resolution Representation Learning for Human Pose Estimation](https://cdn.slidesharecdn.com/ss_thumbnails/20190517hrnet-190517005504-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]画像を使ったSim2Realの現況](https://cdn.slidesharecdn.com/ss_thumbnails/imagesim2real-201030025320-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]High-Quality Self-Supervised Deep Image Denoising](https://cdn.slidesharecdn.com/ss_thumbnails/high-qualityself-superviseddeepimagedenoising-200501014639-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Pay Attention to MLPs (gMLP)](https://cdn.slidesharecdn.com/ss_thumbnails/kobayashi-210528032327-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Set Transformer: A Framework for Attention-based Permutation-Invariant...](https://cdn.slidesharecdn.com/ss_thumbnails/20200221settransformer-200221020423-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]`強化学習のための状態表現学習 -より良い「世界モデル」の獲得に向けて-](https://cdn.slidesharecdn.com/ss_thumbnails/20181026staterepresenration-181127055206-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]YOLOv4: Optimal Speed and Accuracy of Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/200515dlseminar-200515082345-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Temporal DifferenceVariationalAuto-Encoder](https://cdn.slidesharecdn.com/ss_thumbnails/20181130new-190205051636-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]End-to-End Object Detection with Transformers](https://cdn.slidesharecdn.com/ss_thumbnails/200529dlseminardetr-200529061512-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Dense Captioning分野のまとめ](https://cdn.slidesharecdn.com/ss_thumbnails/dlseminar-201202012355-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Xception: Deep Learning with Depthwise Separable Convolutions](https://cdn.slidesharecdn.com/ss_thumbnails/2017-06-22-170623004409-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]YOLO9000: Better, Faster, Stronger](https://cdn.slidesharecdn.com/ss_thumbnails/dlreadingpaper20170804-170803075138-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Reasoning-RCNN: Unifying Adaptive Global Reasoning into Large-scale Ob...](https://cdn.slidesharecdn.com/ss_thumbnails/20190726-190725235641-thumbnail.jpg?width=640&height=640&fit=bounds)



















