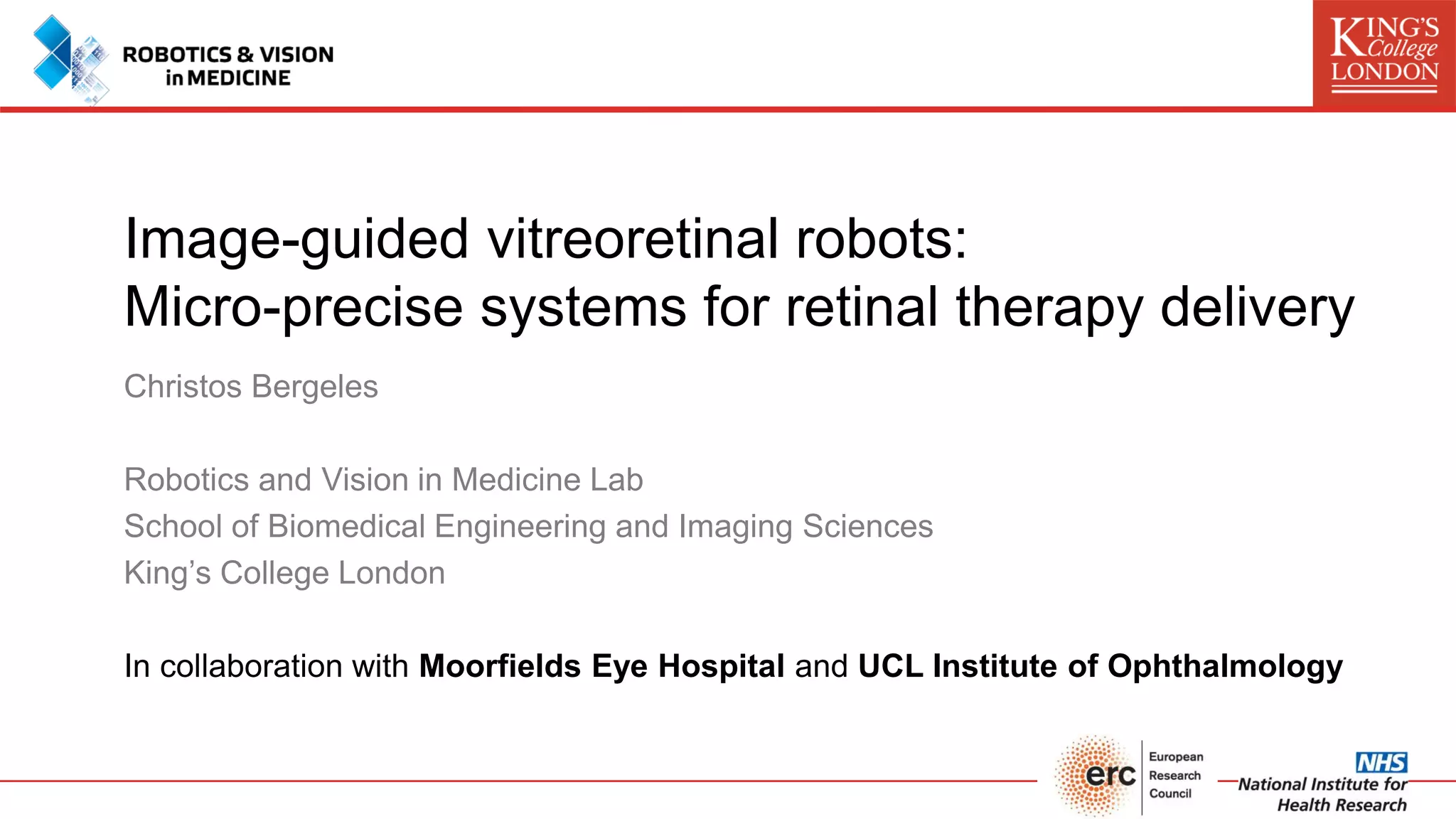
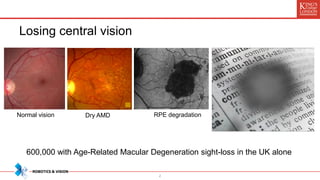
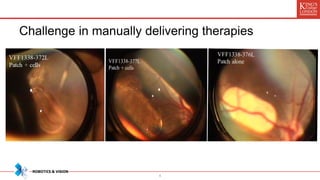
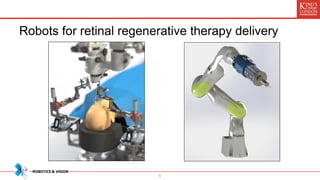
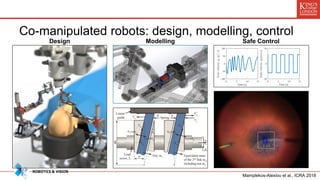
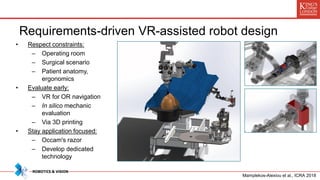
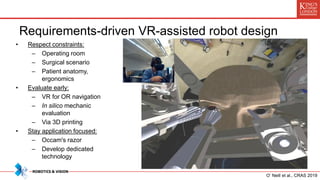
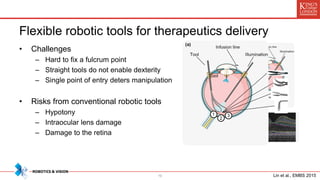
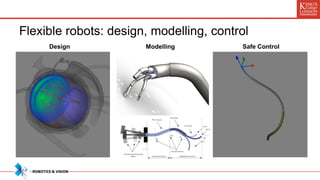
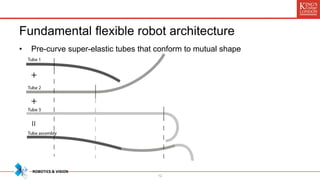
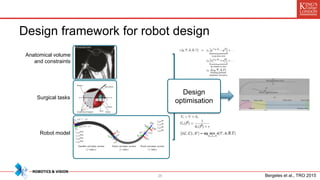
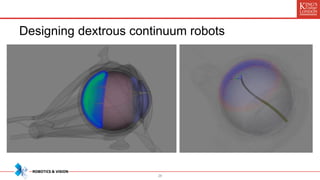
This document discusses the development of robotic systems for delivering cellular therapies to the retina. Age-related macular degeneration causes vision loss for 600,000 people in the UK alone. Manually delivering therapies is challenging due to constraints of the operating room and patient anatomy. Researchers are developing co-manipulated and single-arm flexible robotic systems to overcome these challenges. Co-manipulated systems enhance dexterity while maintaining direct clinical supervision. Single-arm flexible systems offer dexterity akin to a micro-sized wrist and increased capacity for interventions, though control is counterintuitive. The goal is to create micro-precise robotic tools to replace lost cells in the retina for conditions like macular degeneration.