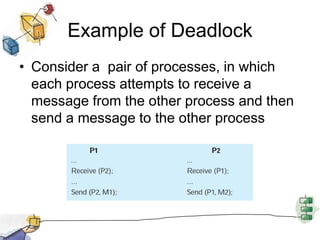
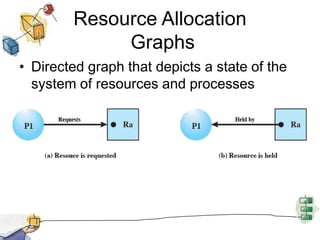
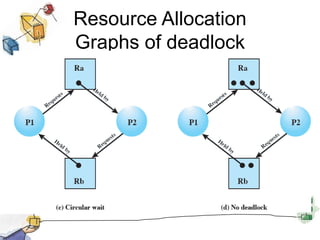
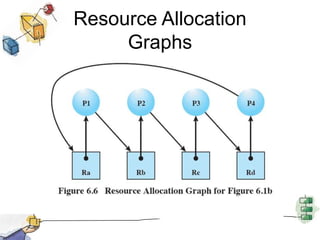
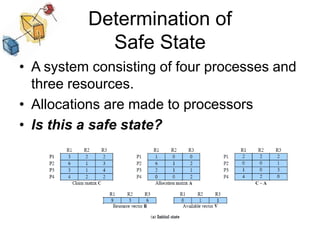
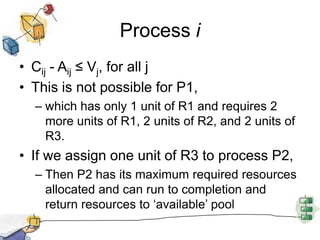
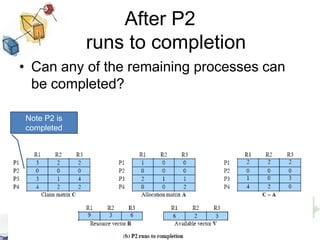
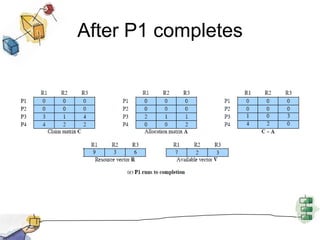
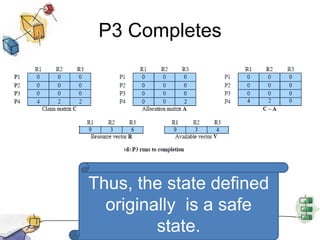
The document discusses concurrency issues related to deadlock and starvation. It covers different approaches to dealing with deadlock including prevention, avoidance, and detection. For prevention, it discusses restricting conditions that allow deadlock like mutual exclusion, hold and wait, no preemption, and circular wait. Avoidance uses techniques like process initiation denial and resource allocation denial to dynamically determine if a request could lead to deadlock. Detection involves analyzing resource allocation graphs to check for deadlocked processes.



![Database System Concepts AND architecture [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/databasesystemconceptsandarchitectureautosaved-230817173311-be7f8590-thumbnail.jpg?width=640&height=640&fit=bounds)

































![3 (1) [Autosaved].ppt](https://cdn.slidesharecdn.com/ss_thumbnails/31autosaved-221227201419-17f998ab-thumbnail.jpg?width=640&height=640&fit=bounds)