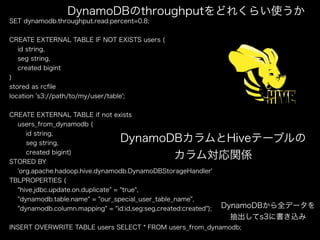
SET dynamodb.throughput.read.percent=0.8;
!
CREATE EXTERNALTABLE IF NOT EXISTS users (
id string,
seg string,
created bigint
)
stored as rcfile
location 's3://path/to/my/user/table';
!
CREATE EXTERNAL TABLE if not exists
users_from_dynamodb (
id string,
seg string,
created bigint)
STORED BY
'org.apache.hadoop.hive.dynamodb.DynamoDBStorageHandler'
TBLPROPERTIES (
"hive.jdbc.update.on.duplicate" = "true",
"dynamodb.table.name" = "our_special_user_table_name",
"dynamodb.column.mapping" = "id:id,seg:seg,created:created");
!
INSERT OVERWRITE TABLE users SELECT * FROM users_from_dynamodb;
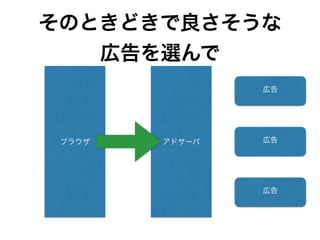
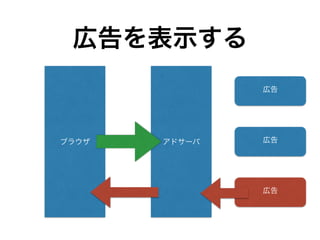
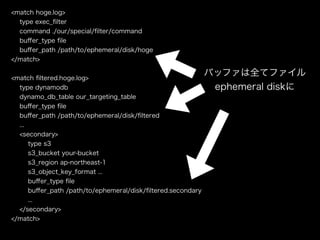
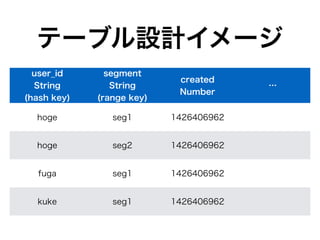
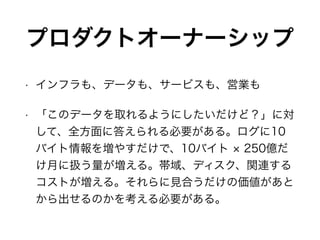
DynamoDBのthroughputをどれくらい使うか
DynamoDBカラムとHiveテーブルの
カラム対応関係
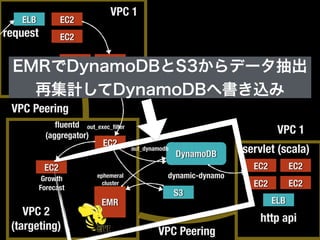
DynamoDBから全データを
抽出してs3に書き込み
























![[JAWS DAYS 2017 ワークショップ] 不安で夜眠れないAWSアカウント管理者に送る処方箋という名のハンズオン](https://cdn.slidesharecdn.com/ss_thumbnails/20170311jawsdays2017h1-170311030315-thumbnail.jpg?width=640&height=640&fit=bounds)






















![[JAWS Days 2015 LT]使い始めて3年半、ようやくテスト始めました](https://cdn.slidesharecdn.com/ss_thumbnails/jasw-days-lt-150323200941-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)






![[Deep Dive]Infra寄りのDevがお送りするRDS for Aurora徹底検証](https://cdn.slidesharecdn.com/ss_thumbnails/auroradeep-150322203758-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)



















![[AWSマイスターシリーズ] Amazon DynamoDB](https://cdn.slidesharecdn.com/ss_thumbnails/20131002aws-meister-regenerate-dynamodb-public-131004025730-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)







