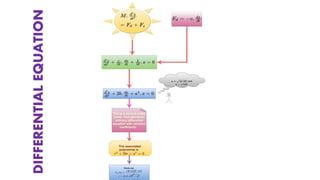
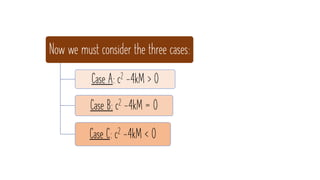
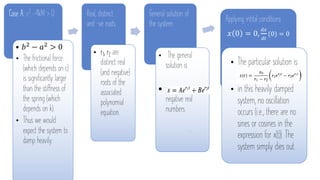
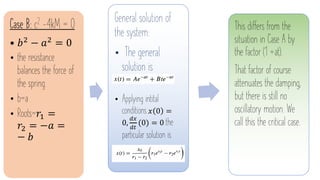
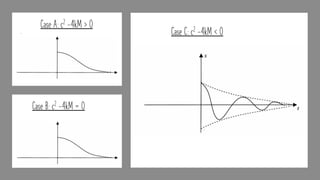
The document discusses damped vibrations of a spring-mass system. It notes that real systems experience damping due to friction, unlike the undamped model. There are three cases to consider based on the relationship between the damping coefficient c and spring constant k: A) heavily damped if c^2 - 4kM > 0, B) critically damped if c^2 - 4kM = 0, and C) underdamped if c^2 - 4kM < 0. For case A, the roots are distinct and real, leading to an exponential decay without oscillations. For case B, the roots are equal, resulting in decay attenuated by a linear factor.