Download to read offline
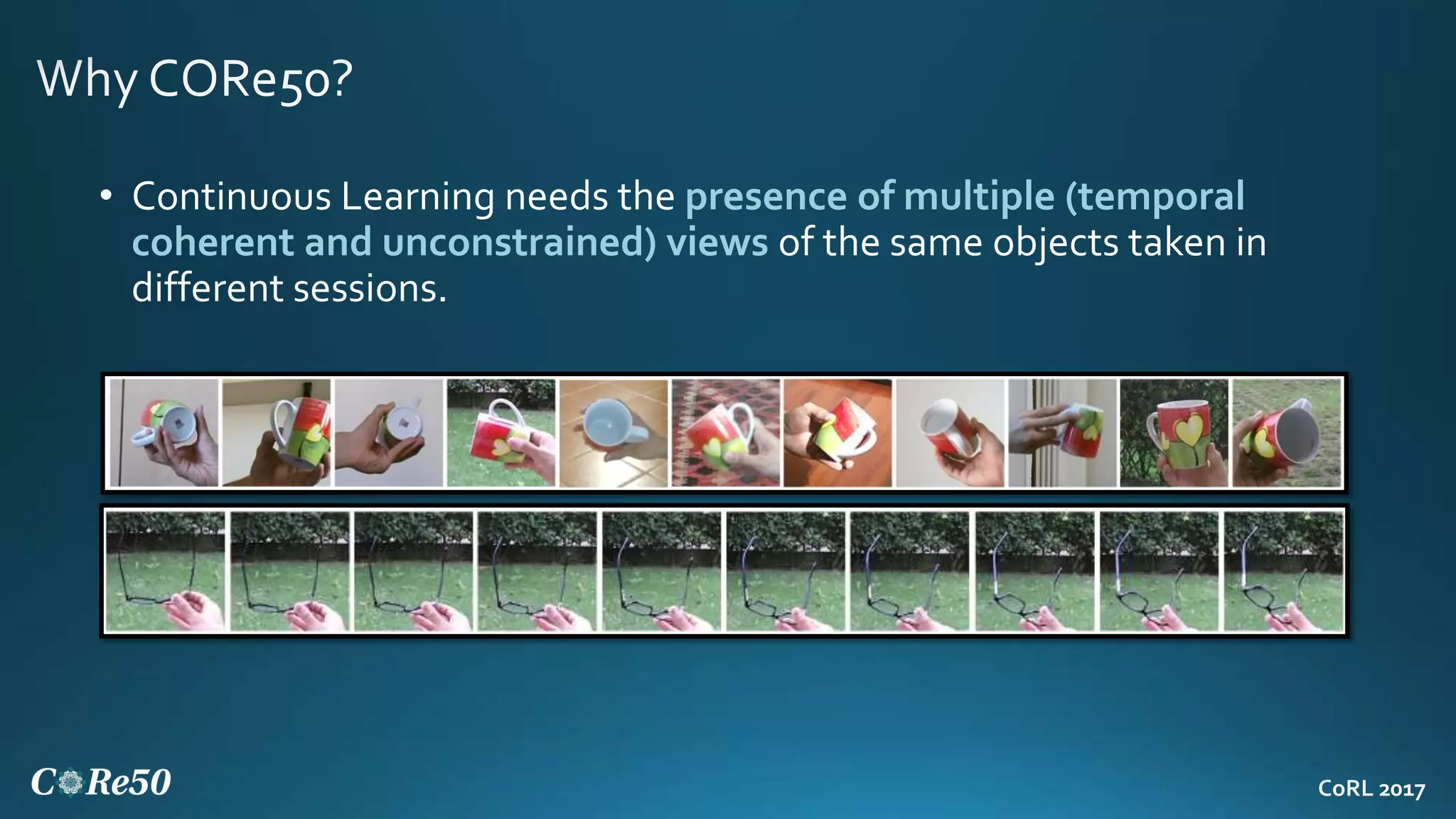
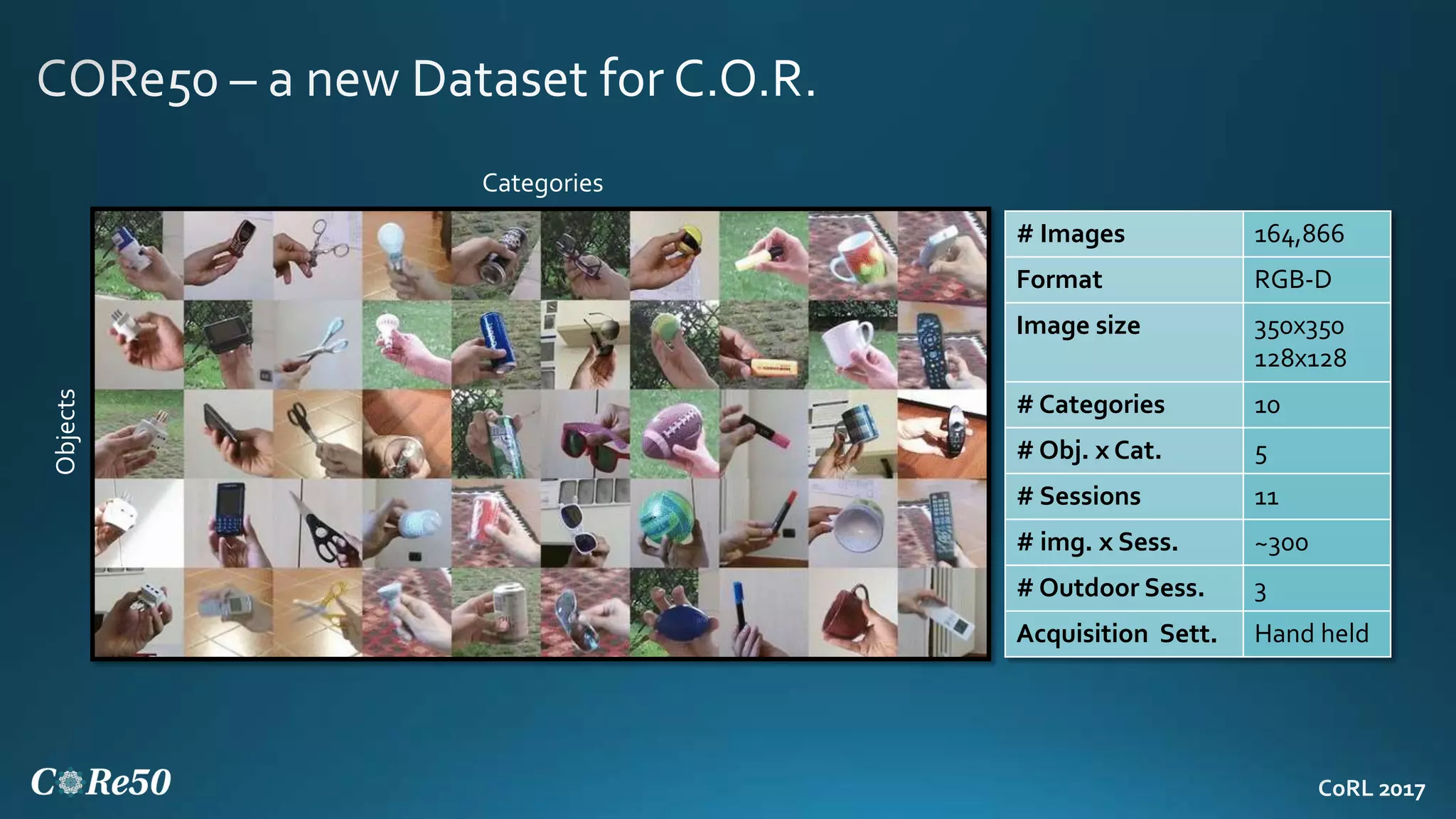
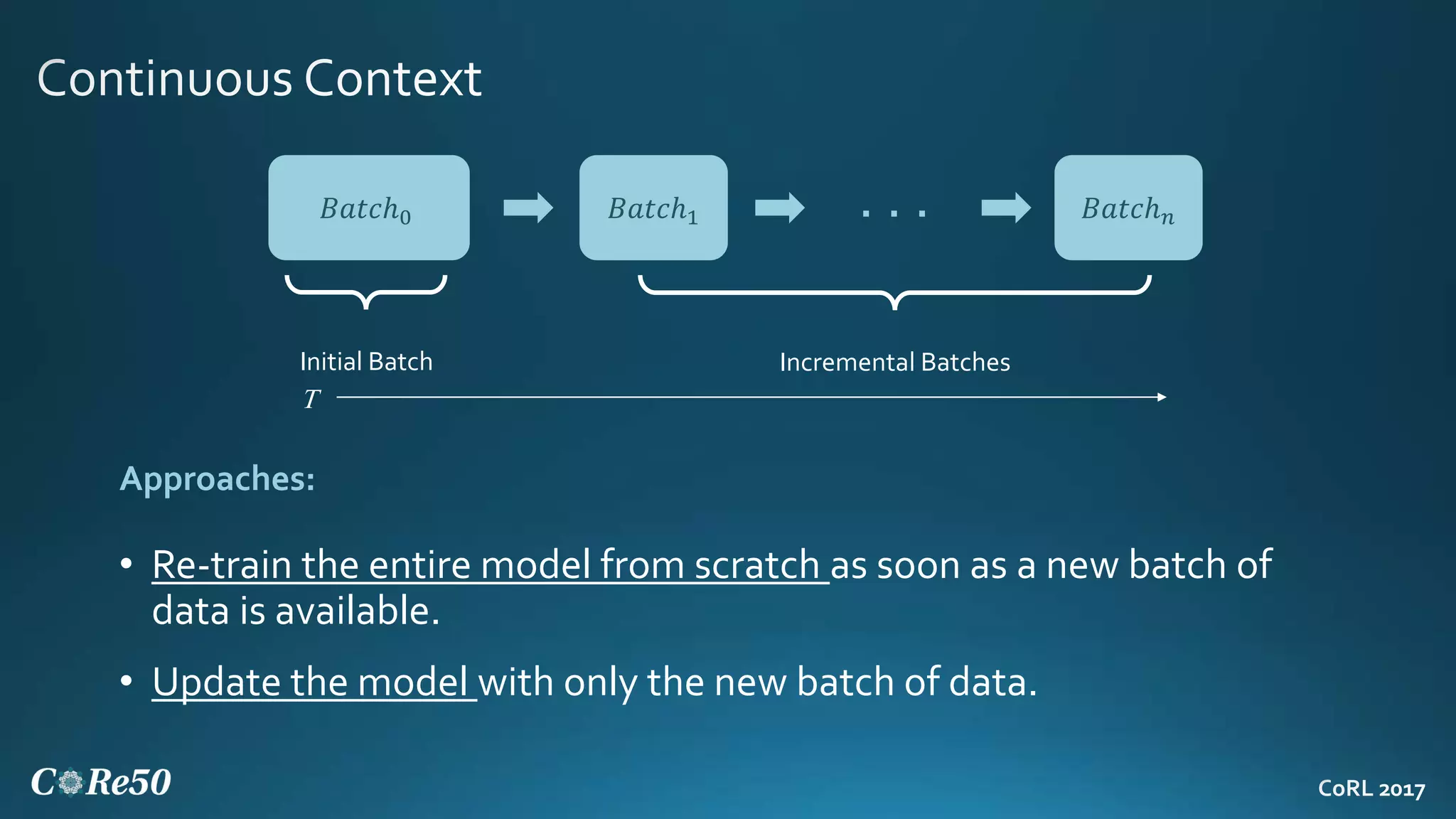
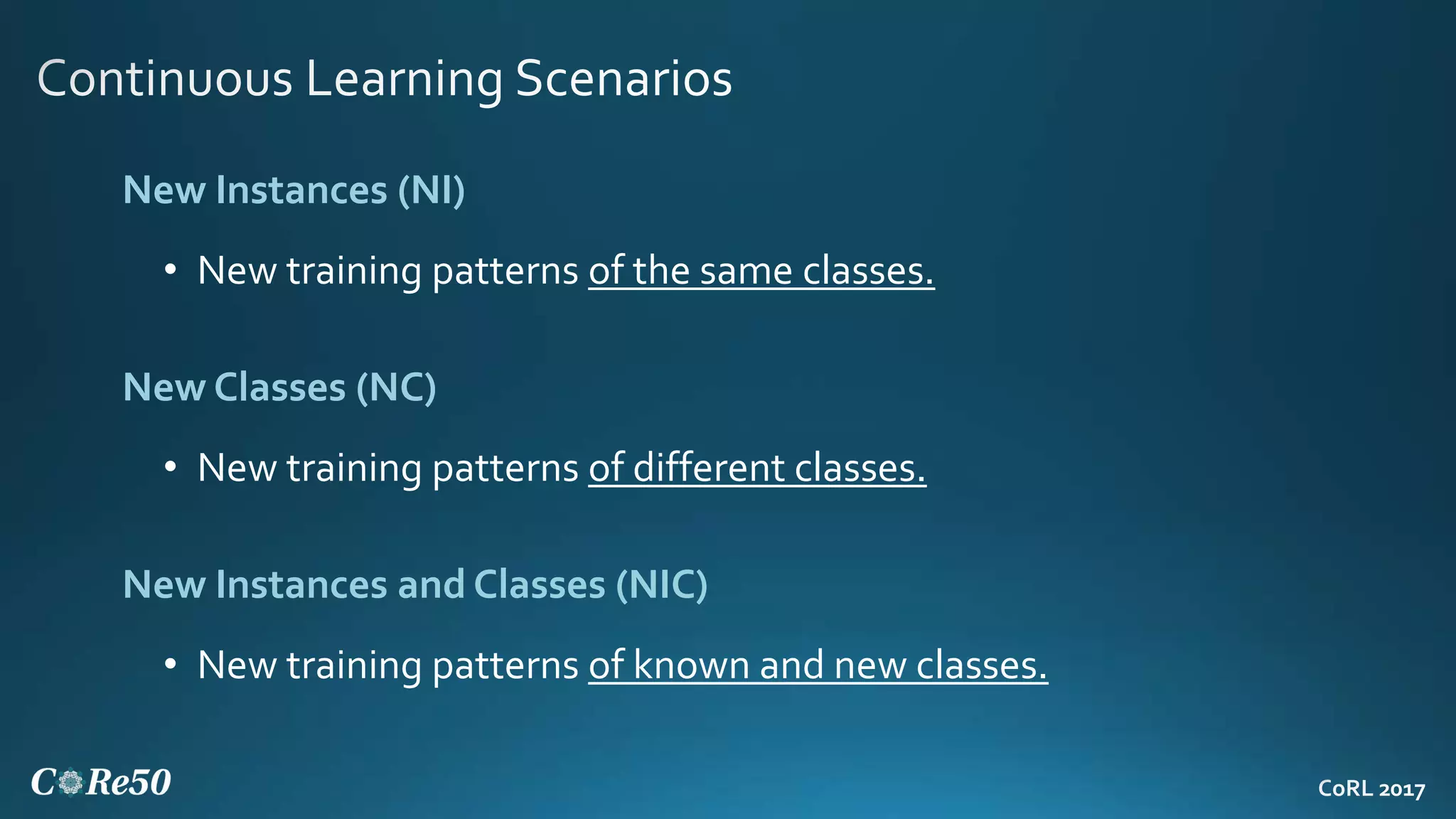
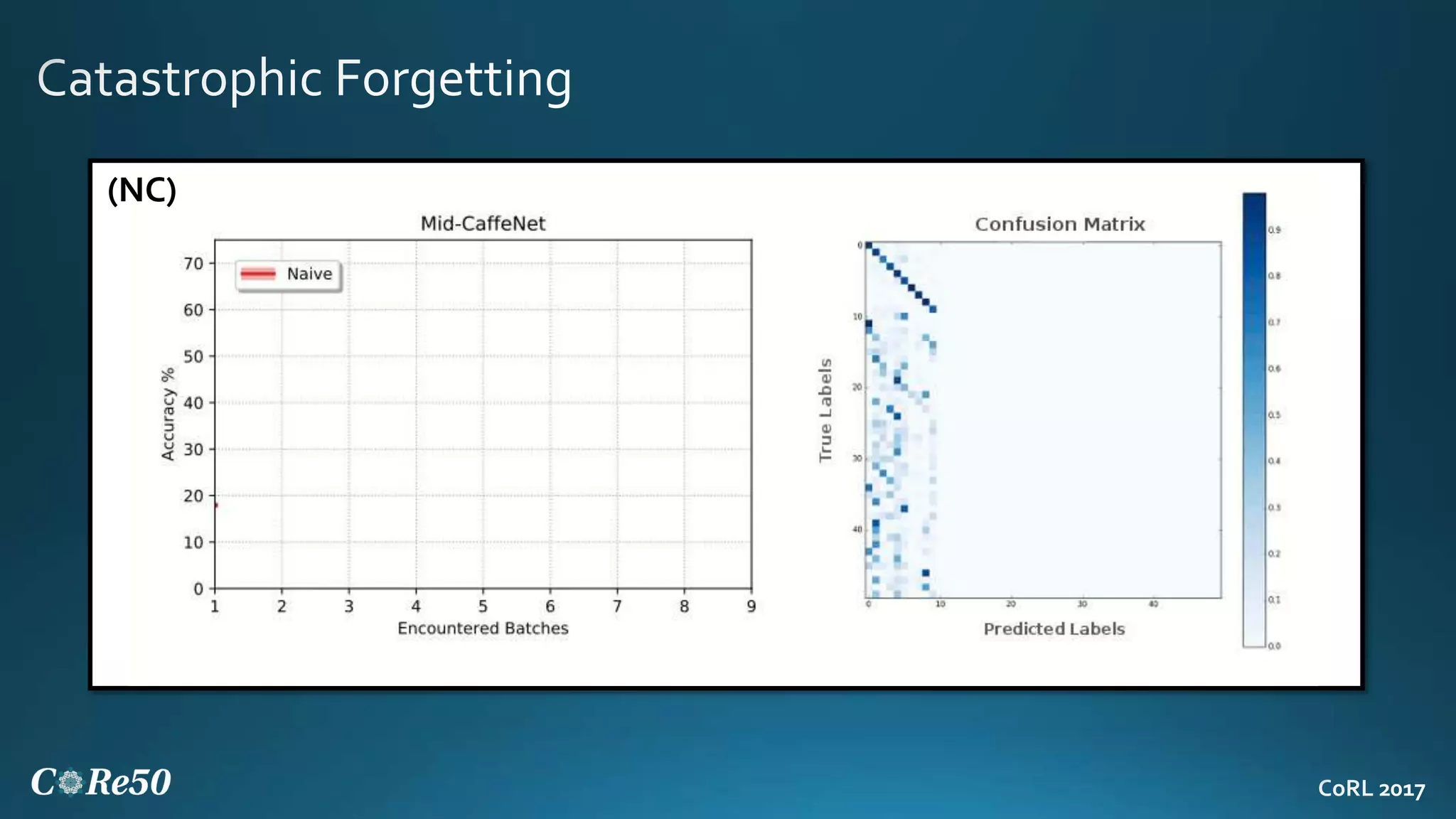
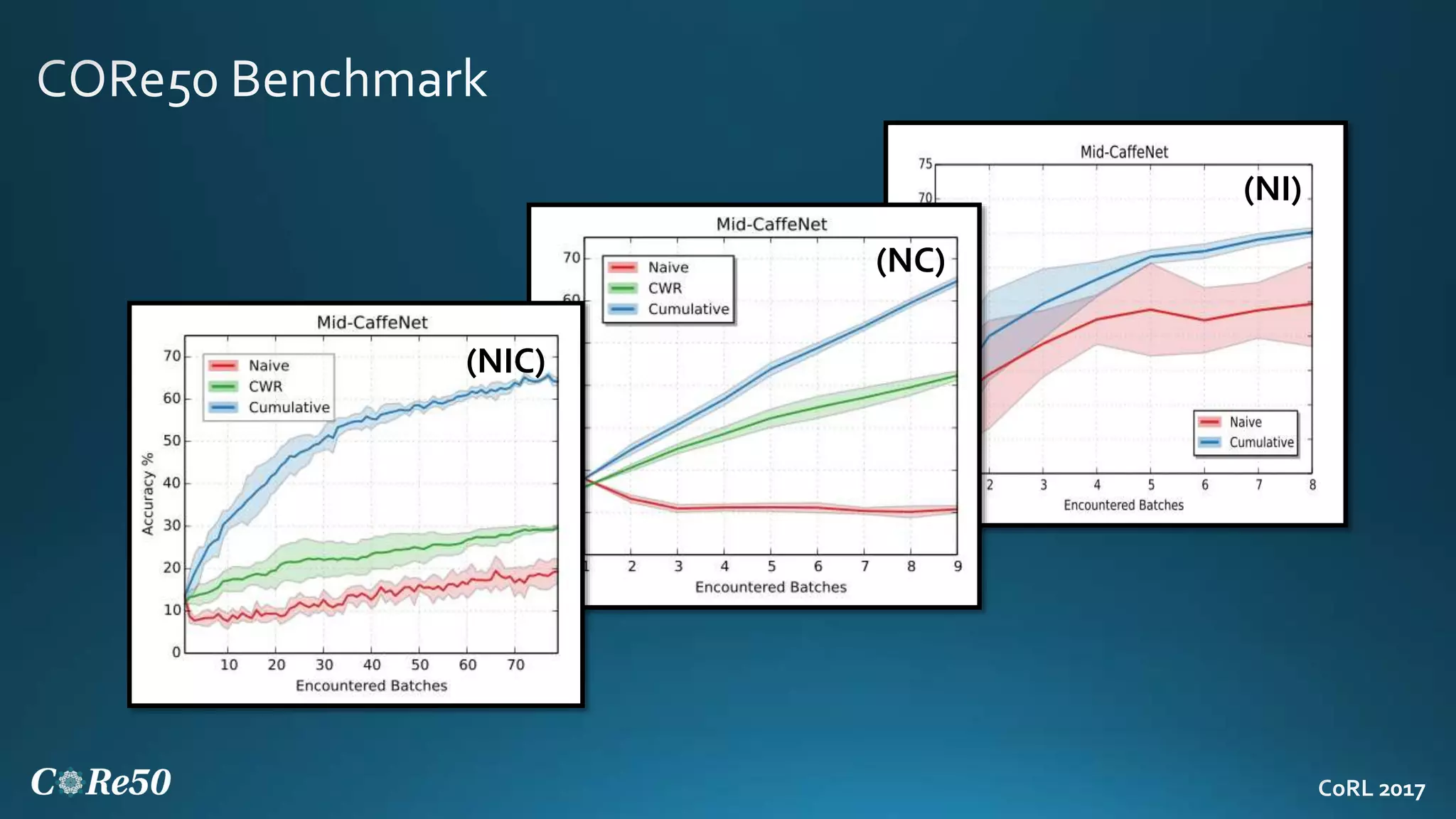

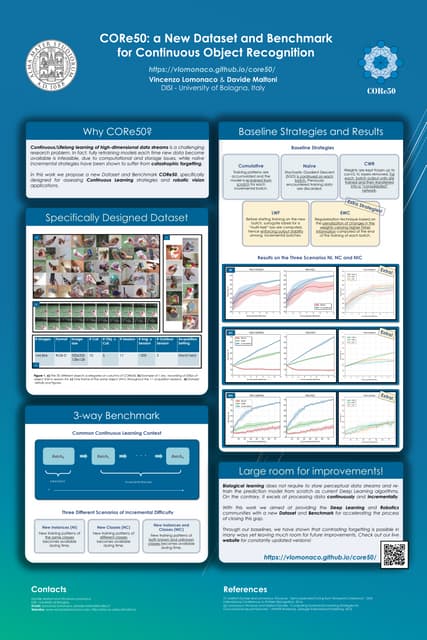
The document describes Core50, a dataset for continuous object recognition from streaming video. It contains over 164,000 RGB-D images across 10 object categories captured in 11 sessions over time. The dataset aims to facilitate research on learning approaches that can continuously learn from new data distributions without forgetting previously learned knowledge. It addresses challenges of continuous learning including new instances of known classes, new classes, and both new instances and classes.