- The document outlines topics to be covered in a class review on motion in 2D and 3D, including exam instructions, example problems, and key concepts like position, velocity, acceleration, projectile motion, uniform circular motion, and relative motion.
- Key formulas are provided for acceleration, period, frequency, analyzing circular motion, and relative motion between reference frames.
- An exam on these topics from chapters 4 and 5 of the textbook will take place that evening from 8:20-10:20pm. WebAssign registration is required to complete online homework problems.



![sin cos
sin cos
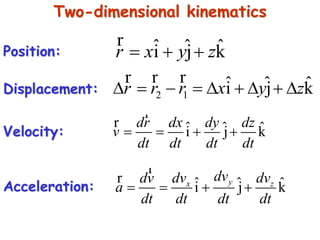
ˆ ˆi j
x y
x y
x y
v r t v r t
v v t v v t
v v v
r
Analyzing the motion
cos sinp px r t y r t
p p
x y
dx dy
v v
dt dt
[remember, ]
v
v r
r
](https://image.slidesharecdn.com/class9-200104044306/85/Class9-6-320.jpg)