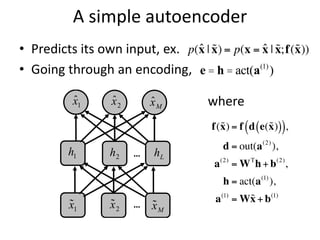
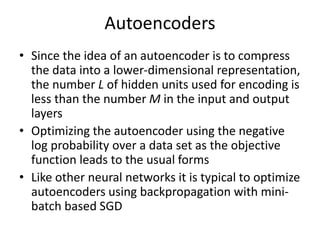
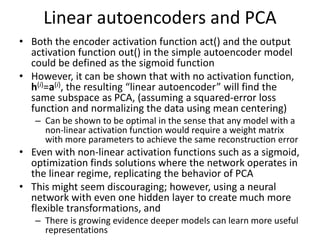
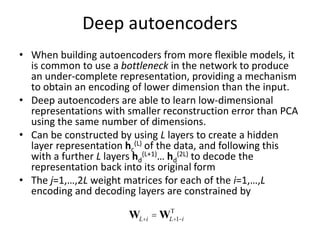
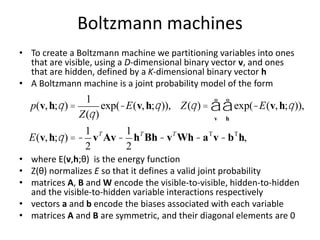
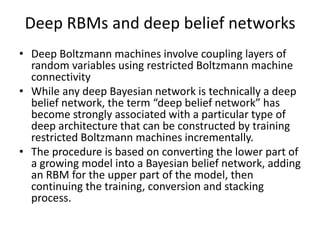
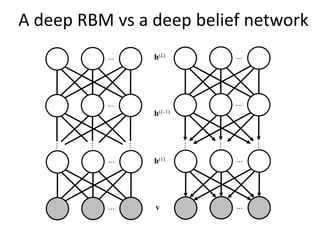
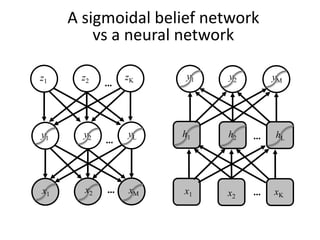
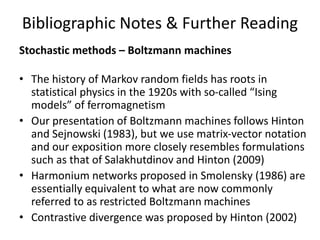
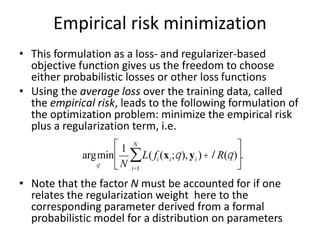
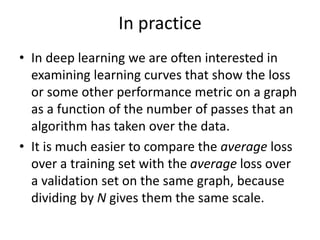
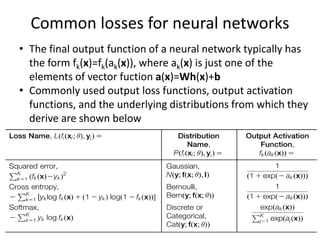
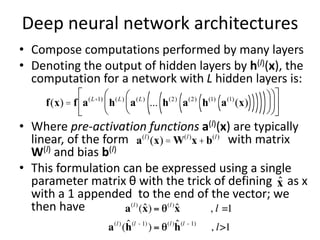
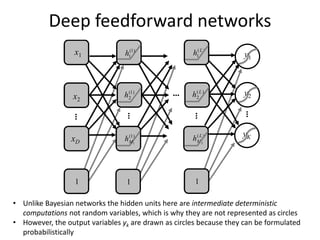
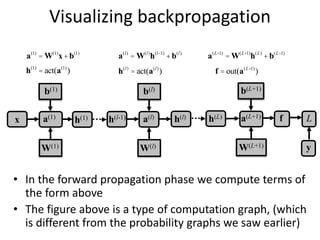
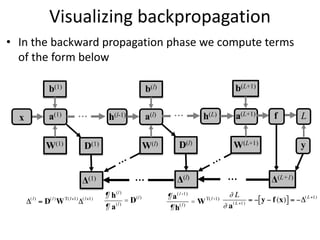
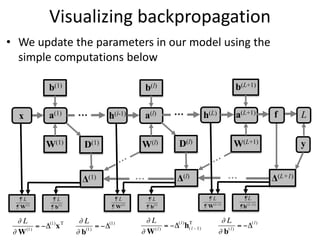
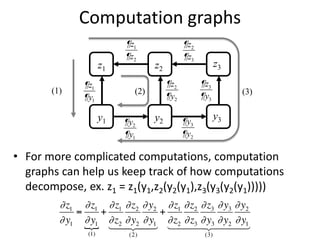
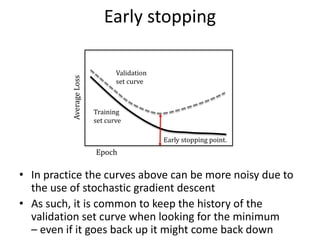
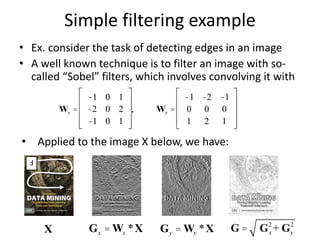
The document discusses deep learning techniques. It introduces deep learning and its impact on fields like speech recognition and computer vision. Deep learning uses large datasets and high-capacity models with many parameters to exploit information in data more effectively than traditional machine learning. The document also discusses key developments in deep learning like increased data, deeper network architectures, and accelerated training with GPUs. It provides examples of common neural network architectures, losses, and activation functions used in deep learning.

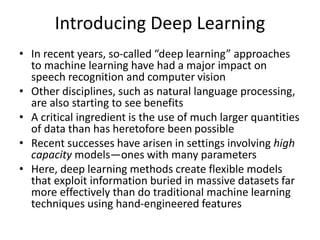
![Backpropagation in matrix vector form
• Backpropagation is based on the chain rule of
calculus
• Consider the loss for a single-layer network with a
softmax output (which corresponds exactly to the
model for multinomial logistic regression)
• We use multinomial vectors y, with a single
dimension yk = 1 for the corresponding class label
and whose other dimensions are 0
• Define , and ,
where θk is a
column vector containing the kth row of the
parameter matrix
• Consider the softmax loss for f(a(x))
f =[ f1(a), … , fK (a) ]T](https://image.slidesharecdn.com/chapter10-231015053758-df62baf8/85/Chapter10-pptx-21-320.jpg)
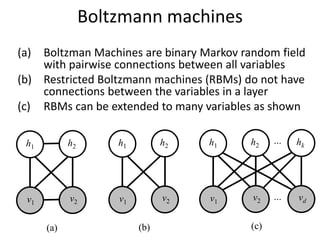
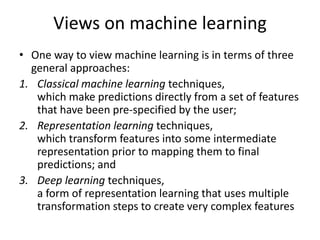
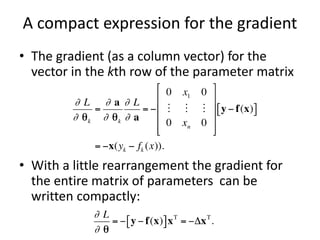
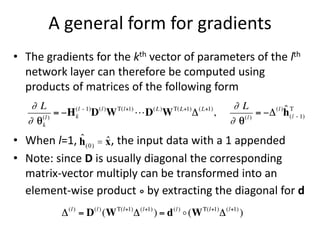
![Matrix vector form of gradient
• We can write
and since
we have
• Notice that we avoid working with the partial
derivative of the vector a with respect to the matrix θ,
because it cannot be represented as a matrix — it is a
multidimensional array of numbers (a tensor).
¶ L
¶ a
= - y-f(x)
[ ]º -D](https://image.slidesharecdn.com/chapter10-231015053758-df62baf8/85/Chapter10-pptx-23-320.jpg)
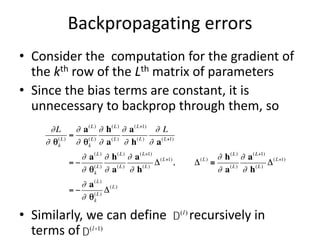

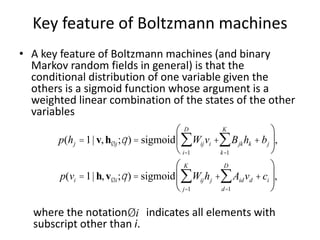
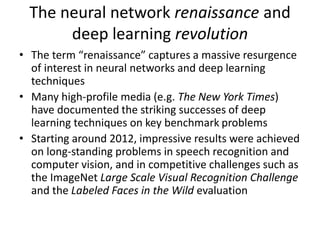
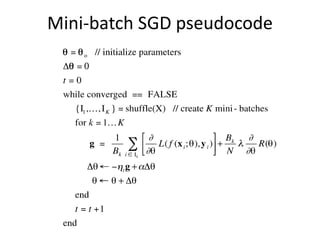
![Momentum
• As with regular gradient descent, ‘momentum’ can
help the optimization escape plateaus in the loss
• Momentum is implemented by computing a moving
average:
– where the first term is the current gradient of the loss
times a learning rate
– the second term is the previous update weighted by
• Since the mini- batch approach operates on a small
subset of the data, this averaging can allow information
from other recently seen mini-batches to contribute to
the current parameter update
• A momentum value of 0.9 is often used as a starting
point, but it is common to hand-tune it, the learning
rate, and the schedule used to modify the learning rate
during the training process
a Î[0,1]](https://image.slidesharecdn.com/chapter10-231015053758-df62baf8/85/Chapter10-pptx-46-320.jpg)
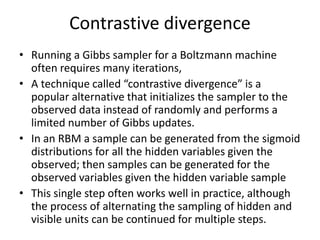
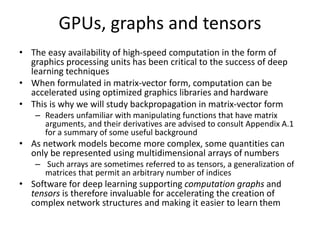
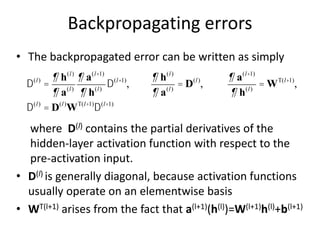
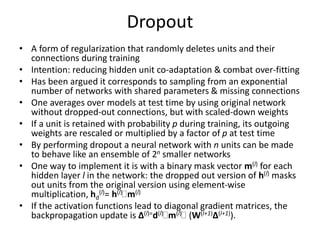
![Learning rate schedules
• The learning rate is a critical choice when using
mini-batch based stochastic gradient descent.
• Small values such as 0.001 often work well, but it
is common to perform a logarithmically spaced
search, say in the interval [10-8, 1], followed by a
finer grid or binary search.
• The learning rate may be adapted over epochs t
to give a learning rate schedule, ex.
• A fixed learning rate is often used in the first few
epochs, followed by a decreasing schedule
• Many other options, ex. divide the rate by 10
when the validation error rate ceases to improve
ht =h0 (1+et)-1](https://image.slidesharecdn.com/chapter10-231015053758-df62baf8/85/Chapter10-pptx-47-320.jpg)
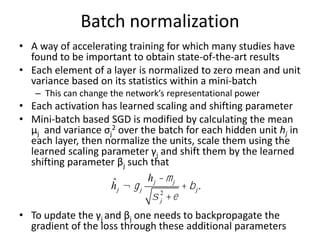
![Parameter initialization
• Can be deceptively important!
• Bias terms are often initialized to 0 with no issues
• Weight matrices more problematic, ex.
– If initialized to all 0s, can be shown that the tanh activation
function will yield zero gradients
– If the weights are all the same, hidden units will produce same
gradients and behave the same as each other (wasting params)
• One solution: initialize all elements of weight matrix from
uniform distribution over interval [–b, b]
• Different methods have been proposed for selecting the
value of b, often motivated by the idea that units with
more inputs should have smaller weights
• Weight matrices of rectified linear units have been
successfully initialized using a zero-mean isotropic Gaussian
distribution with standard deviation of 0.01](https://image.slidesharecdn.com/chapter10-231015053758-df62baf8/85/Chapter10-pptx-51-320.jpg)
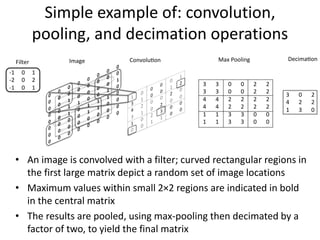
![Correlation and convolution
• Suppose our filter is centered, giving the first vector
element an index of –1, or an index of –K, where K is the
“radius” of the filter, then 1D filtering can be written
• Directly generalizing this filtering to a 2D image X and
filter W gives the cross-correlation, Y=WX, for which
the result for row r and column c is
• The convolution of an image with a filter, Y=W*X , is
obtained by simply flipping the sense of the filter
y[n]= w[k]x[n+k]
k=-K
K
å
Y[r,c]= W[ j,k]X[r + j,c+k]
k=-K
K
å
j=-J
J
å
Y[r,c]= W[-j,-k]X[r + j,c+k]
k=-K
K
å
j=-J
J
å](https://image.slidesharecdn.com/chapter10-231015053758-df62baf8/85/Chapter10-pptx-64-320.jpg)
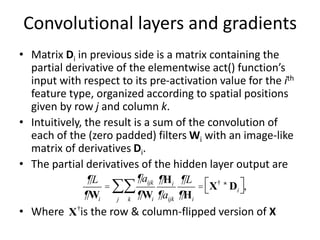
![Convolutional layers and gradients
• Let’s consider how to compute the gradients
needed to optimize a convolutional network
• At a given layer we have i=1…N(l) feature filters
and corresponding feature maps
• The convolutional kernel matrices Ki contain
flipped weights with respect to kernel weight
matrices Wi
• With activation function act(), and for each
feature type i, a scaling factor gi and bias matrix
Bi, the feature maps are matrices Hi(Ai(X)) and
can be visualized as a set of images given by
Hi = gi act Ki *X+Bi
[ ]= gi act Ai (X)
[ ]](https://image.slidesharecdn.com/chapter10-231015053758-df62baf8/85/Chapter10-pptx-68-320.jpg)
![Convolutional layers and gradients
• The loss is a function of the N(l) feature maps for
a given layer,
• Define h=vec(H), x=vec(X), a=vec(A), where the
vec() function returns a vector with stacked
columns of the given matrix argument,
• Choose an act() function that operates
elementwise on an input matrix of pre-
activations and has scale parameters of 1 and
biases of 0.
• Partial derivatives of hidden layer output with
respect to input X of the convolutional units are
L = L(H1
(l)
,… ,HN(l)
(l)
)
¶L
¶X
=
¶aijk
¶X
¶Hi
¶aijk
k
å
j
å
i
å
¶L
¶Hi
=
¶ai
¶x
¶hi
¶ai
¶L
¶hi
i
å = Wi *Di
[ ]
i
å ,Di = dL ¶Ai](https://image.slidesharecdn.com/chapter10-231015053758-df62baf8/85/Chapter10-pptx-69-320.jpg)