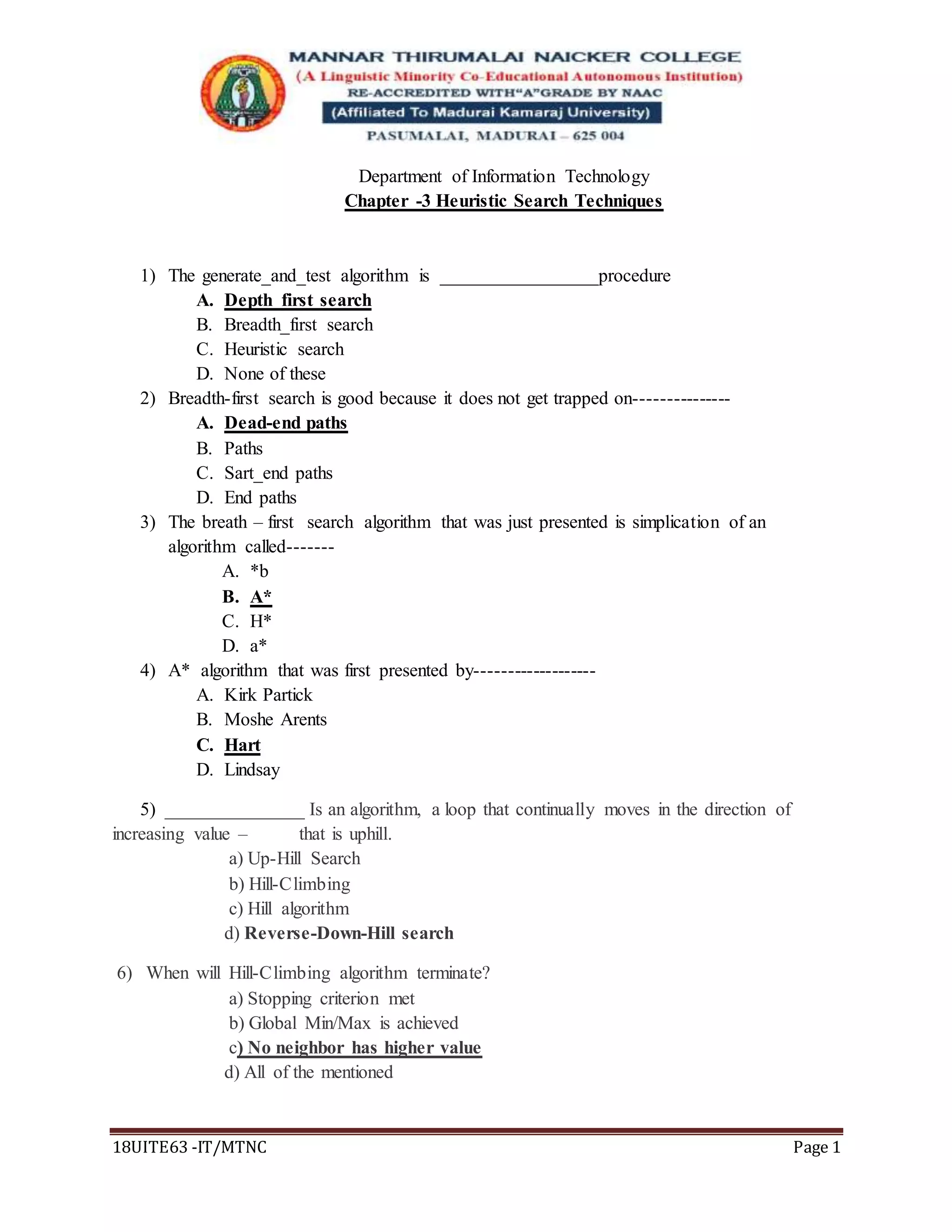
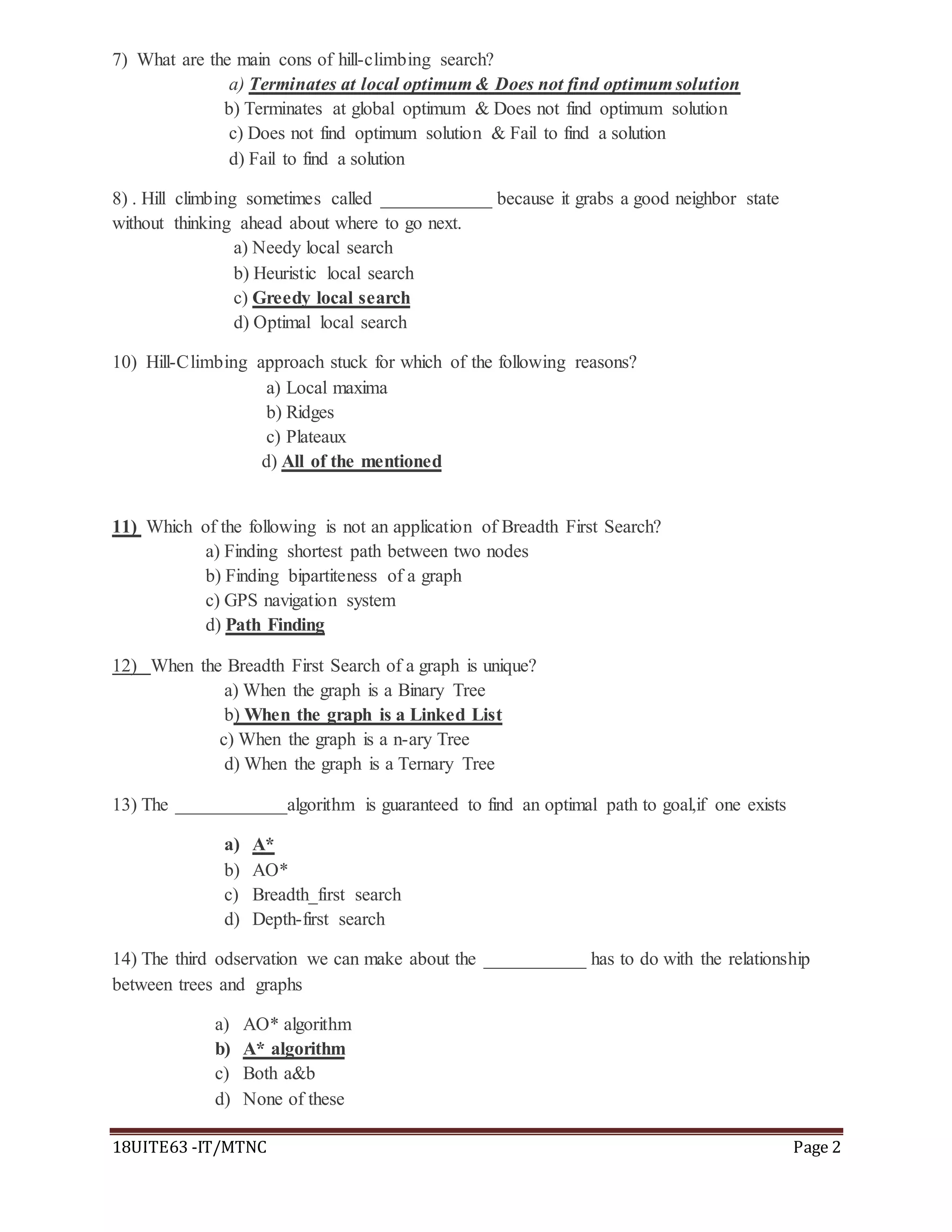
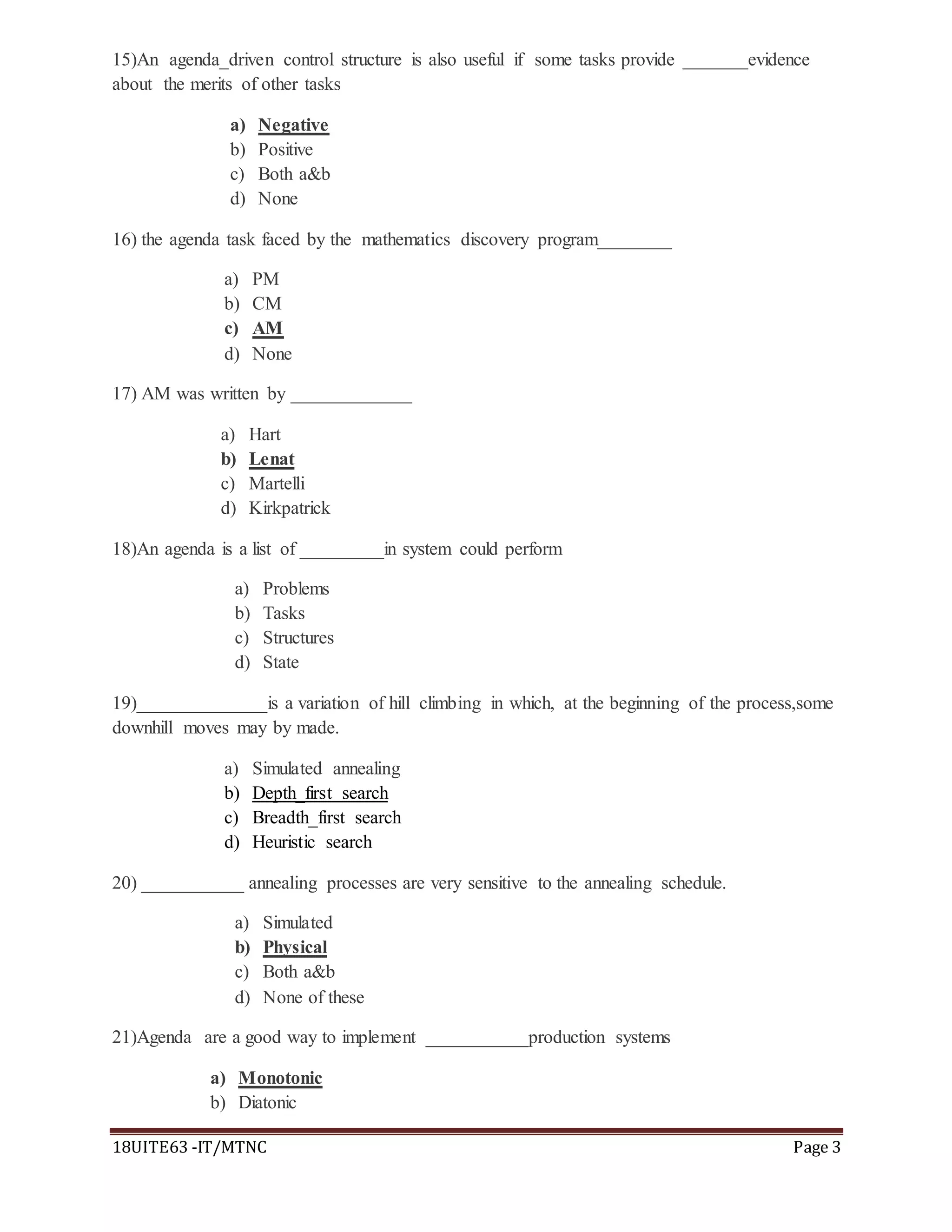
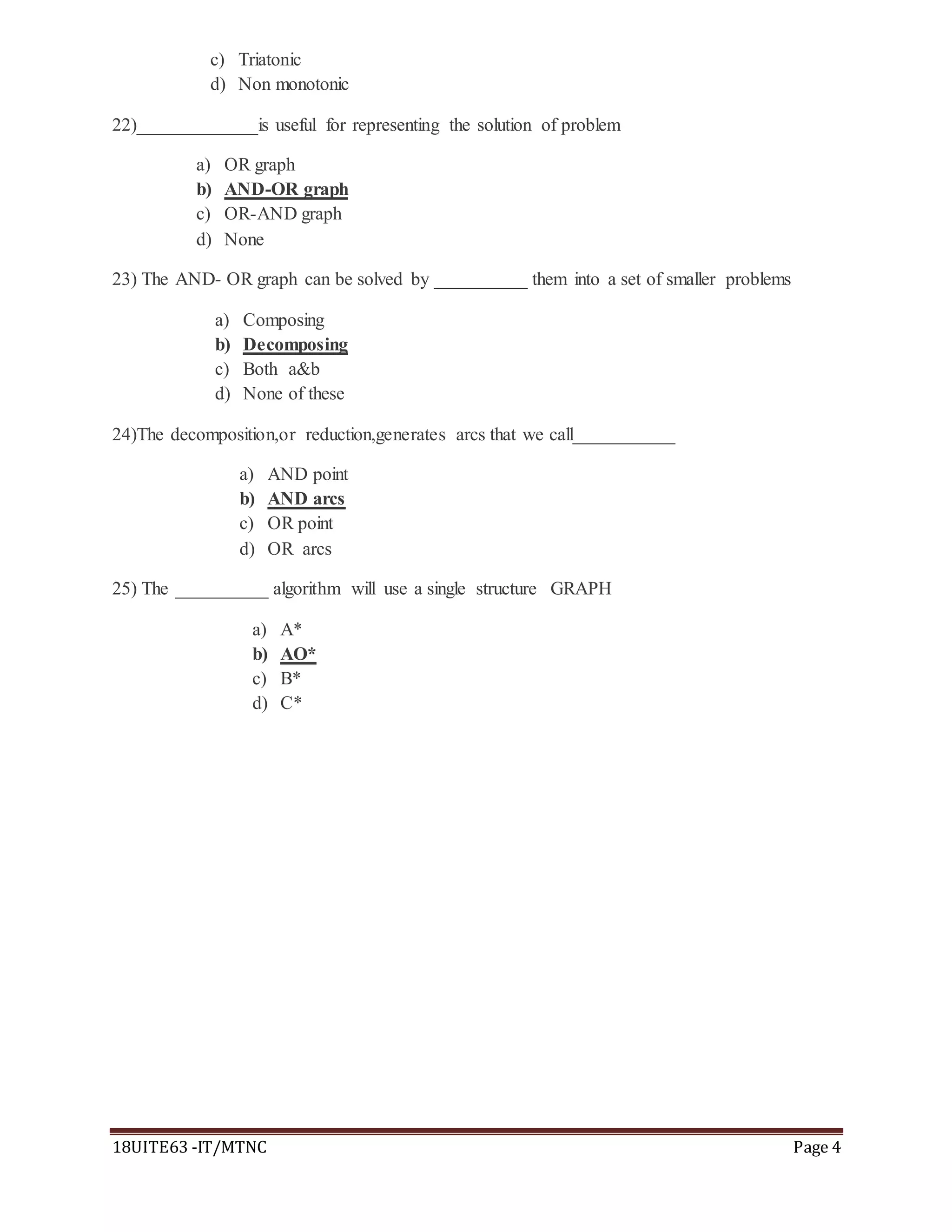
This document contains 25 multiple choice questions about various heuristic search techniques and algorithms including breadth-first search, depth-first search, hill climbing, A*, and AND-OR graphs. It asks about the characteristics, applications, advantages, and limitations of these techniques. Some key algorithms and concepts covered are hill climbing getting stuck in local maxima, A* being guaranteed to find an optimal solution if one exists, AND-OR graphs being decomposed into smaller subproblems, and agendas being useful for implementing non-monotonic production systems.



![[Question Paper] Data Communication and Network Standards (Revised Course) [J...](https://cdn.slidesharecdn.com/ss_thumbnails/dcns-qprevisedcoursejun-2016-170714195209-thumbnail.jpg?width=640&height=640&fit=bounds)
![Geographic Information Systems (May - 2018) [IDOL - Old Course | Question Paper]](https://cdn.slidesharecdn.com/ss_thumbnails/geographicinformationsystemsmay-2018-180813195855-thumbnail.jpg?width=640&height=640&fit=bounds)
![Geographic Information Systems (December - 2018) [IDOL - Revised Course]](https://cdn.slidesharecdn.com/ss_thumbnails/gis-idol-dec-2018-qp-190220202540-thumbnail.jpg?width=640&height=640&fit=bounds)



![[Question Paper] Microprocessor and Microcontrollers (Revised Course) [Octobe...](https://cdn.slidesharecdn.com/ss_thumbnails/mm-qprevisedcourseoct-2016-170713044200-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Question Paper] Computer Graphics (Revised Course) [January / 2017]](https://cdn.slidesharecdn.com/ss_thumbnails/cg-qprevisedcoursejan-2017-170717110028-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Question Paper] Embedded Systems and Programming (Old Syllabus) [April / 2013]](https://cdn.slidesharecdn.com/ss_thumbnails/esp-qp-os-april-2013-170827110634-thumbnail.jpg?width=640&height=640&fit=bounds)

![Internet Technology (April – 2013) [Revised Syllabus | Question Paper]](https://cdn.slidesharecdn.com/ss_thumbnails/it-rs-qp-april-2013-180428075807-thumbnail.jpg?width=640&height=640&fit=bounds)

![Artificial Intelligence (November – 2018) [Choice Based | Question Paper]](https://cdn.slidesharecdn.com/ss_thumbnails/ai-cbcs-nov-2018-qp-191111054942-thumbnail.jpg?width=640&height=640&fit=bounds)



























































