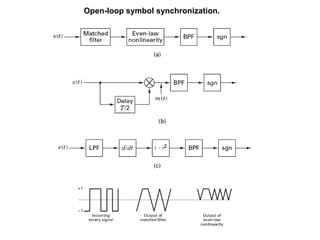
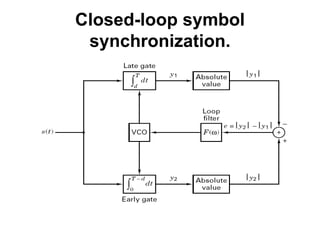
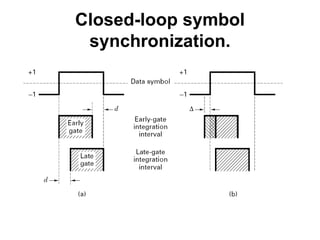
This document discusses various aspects of synchronization in digital communication systems. It covers receiver synchronization techniques like frequency and phase synchronization using phase-locked loops. It also discusses symbol synchronization, both data-aided and non-data-aided approaches. Network synchronization techniques like open-loop and closed-loop transmitter synchronization are introduced as well. The document provides detailed explanations of concepts like acquisition, tracking performance in noise, and steady-state tracking characteristics of phase-locked loops.
![Frequency and Phase
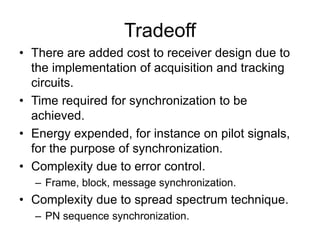
Synchronization.
• For a normalized
input signal of the
form:
• Consider a
normalized VCO
output of the form:
)]
(
cos[
)
( 0 t
t
w
t
r
)]
(
ˆ
sin[
2
)
( 0 t
t
w
t
x
](https://image.slidesharecdn.com/chapter10-synchronisation-230929153113-f909b42c/85/Chapter-10-Synchronisation-ppt-9-320.jpg)
![Frequency and Phase
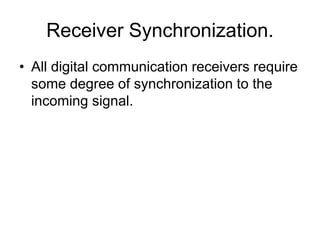
Synchronization.
• Output error signal at
the phase detector
output:
• If the filter output is
low-pass, we will
have
)]
(
ˆ
)
(
2
sin[
)]
(
ˆ
)
(
sin[
)]
(
cos[
)]
(
ˆ
sin[
2
)
(
)
(
)
(
0
0
0
t
t
t
w
t
t
t
t
w
t
t
w
t
r
t
x
t
e
)]
(
ˆ
)
(
sin[
)
( t
t
t
y
](https://image.slidesharecdn.com/chapter10-synchronisation-230929153113-f909b42c/85/Chapter-10-Synchronisation-ppt-10-320.jpg)
![Frequency and Phase
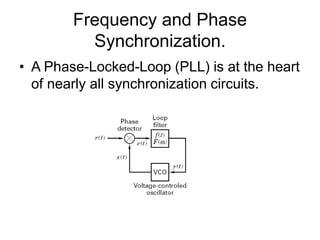
Synchronization.
• The low pass filter produces an output that is
solely the function of difference in phase between
the two signals.
• The VCO output will be a linear function of y(t).
• Deviation in frequency is given as
)
(
*
)]
(
ˆ
)
(
[
)
(
*
)
(
)
(
)]
(
ˆ
[
)
(
t
f
t
t
K
t
f
t
e
K
t
y
K
dt
t
d
t
o
o
o
Gain of the VCO Loop filter impulse response](https://image.slidesharecdn.com/chapter10-synchronisation-230929153113-f909b42c/85/Chapter-10-Synchronisation-ppt-11-320.jpg)
![Frequency and Phase
Synchronization.
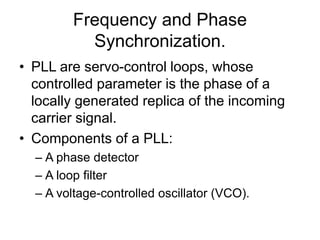
• The Fourier transform of the difference equation
leads to
Reorganizing, we have
)
(
*
)]
(
ˆ
)
(
[
)
(
*
)
(
)
(
)]
(
ˆ
[
)
(
t
f
t
t
K
t
f
t
e
K
t
y
K
dt
t
d
t
o
o
o
)
(
)]
(
ˆ
)
(
[
)
( w
F
K
j o
)
(
)
(
)
(
)
(
)
(
ˆ
H
w
F
K
j
w
F
K
o
o
Closed-loop transfer function](https://image.slidesharecdn.com/chapter10-synchronisation-230929153113-f909b42c/85/Chapter-10-Synchronisation-ppt-12-320.jpg)
![Performance in noise
• The input might be noisy, as is the case in many
communication systems.
• n(t) can be expanded into quadrature
components.
)
(
]
cos[
)
( 0 t
n
t
w
t
r
t
w
t
n
t
w
t
n
t
n s
c 0
0 sin
)
(
cos
)
(
)
(
](https://image.slidesharecdn.com/chapter10-synchronisation-230929153113-f909b42c/85/Chapter-10-Synchronisation-ppt-15-320.jpg)
![Performance in noise
• The output of the phase detector can be written as
• The loop filter eliminates the high-frequency components. We
are then left with
• Let us denote the variance of n/(t) by σn.
• It can be shown that the variance of the output phase is:
• For the special case of white noise
• This is related to the
frequency)
carrier
the
at twice
terms
(
]
ˆ
cos[
)
(
]
ˆ
sin[
)
(
]
ˆ
sin[
)
(
)
(
)
(
t
n
t
n
t
r
t
x
t
e c
s
]
ˆ
cos[
)
(
]
ˆ
sin[
)
(
]
ˆ
sin[
)
(
t
n
t
n
t
n c
s
d
H
G 2
2
ˆ |
)
(
|
)
(
2
1
d
H
No 2
2
ˆ |
)
(
|
2
L
oB
N
2
2
ˆ
](https://image.slidesharecdn.com/chapter10-synchronisation-230929153113-f909b42c/85/Chapter-10-Synchronisation-ppt-16-320.jpg)


































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)












