
Recommended
More Related Content
What's hot
What's hot (19)
Viewers also liked
Viewers also liked (20)
Similar to C slides 11
Similar to C slides 11 (20)
C slides 11
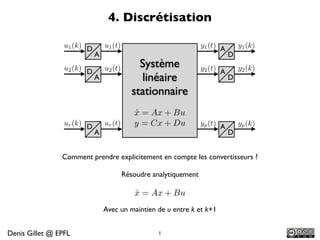
- 1. 4. Discrétisation u1 (k) D u1 (t) y1 (t) A y1 (k) A D u2 (k) D u2 (t) Système y2 (t) A y2 (k) A linéaire D stationnaire x = Ax + Bu ˙ ur (k) D ur (t) y = Cx + Du yp (t) A yp (k) A D Comment prendre explicitement en compte les convertisseurs ? Résoudre analytiquement x = Ax + Bu ˙ Avec un maintien de u entre k et k+1 Denis Gillet @ EPFL 1
- 2. Solution de l’équation d’état x (t) = Ax (t) + Bu (t) ˙ Solution générale = solution homogène + solution particulière Cas scalaire Cas vectoriel x (t0 ) = x0 x (t) = ax (t) ˙ x (t) = Ax (t) ˙ x = eat c2 = ea(t t0 ) x0 1 1 e =1+ + 2 + 3 + ... 2! 3! ⇥ 1 2 1 3 2 3 x = 1 + a (t t0 ) + a (t t0 ) + a (t t0 ) + . . . x0 2! 3! 2 3 x = a0 + a1 (t t0 ) + a2 (t t0 ) + a3 (t t0 ) + . . . Par analogie 2 3 x = A0 + A1 (t t0 ) + A2 (t t0 ) + A3 (t t0 ) + . . . 2
- 3. Solution de l’équation d’état homogène x (t) = Ax (t) ˙ 2 3 x = A0 + A1 (t t0 ) + A2 (t t0 ) + A3 (t t0 ) + . . . x (t0 ) = A0 x (t0 ) = x0 2 x = A1 + 2A2 (t ˙ t0 ) + 3A3 (t t0 ) + . . . x (t) = Ax (t) ˙ x (t0 ) = A1 ˙ x (t0 ) = Ax (t0 ) = Ax0 ˙ x = 2A2 + 6A3 (t ¨ t0 ) + . . . x (t) = Ax (t) ¨ ˙ x (t0 ) = 2A2 ¨ x (t0 ) = Ax (t0 ) = A2 x0 ¨ ˙ 2 3 ⇥ A 2 A 3 x (t) = I + A (t t0 ) + (t t0 ) + (t t0 ) + . . . x0 2! 3! ⇧ ⌅⇤ ⌃ eA(t t0 ) 3
- 4. Exponentielle de matrice 2 3 ⇥ A 2 A 3 Ak k eA(t t0 ) = I + A (t t0 ) + (t t0 ) + (t t0 ) + . . . = (t t0 ) 2! 3! k! k=0 x (t) = eA(t t0 ) x0 x (t1 ) = eA(t1 t0 ) x (t0 ) x (t2 ) = eA(t2 t1 ) x (t1 ) = eA(t2 t1 ) A(t1 t0 ) e x (t0 ) t 2 = t0 x (t0 ) = eA(t0 t1 ) A(t1 t0 ) e x (t0 ) I = eA(t0 t1 ) A(t1 t0 ) e =M 1 M ⇥ 1 A(t1 t0 ) e = eA(t0 t1 ) =e A(t1 t0 ) 4
- 5. Solution particulière de l’équation d’état x (t) = Ax (t) + Bu (t) ˙ x (t) = eA(t t0 ) v (t) AeA(t t0 ) v (t) + eA(t t0 ) v (t) = A eA(t t0 ) v (t) +Bu (t) ˙ ⇤ ⇥ ⌅ ⇤ ⇥ ⌅ x(t) ˙ x(t) ⇥ 1 v (t) = eA(t ˙ t0 ) Bu (t) = e A(t t0 ) Bu (t) t v (t) = e A( t0 ) Bu ( ) d t0 t t x (t) = eA(t t0 ) e A( t0 ) Bu ( ) d = eA(t t0 ) A(t0 e ) Bu ( ) d t0 t0 t x (t) = eA(t ) Bu ( ) d t0 5
- 6. Solution complète de l’équation d’état x (t) = Ax (t) + Bu (t) ˙ t x (t) = e A(t t0 ) x (t0 ) + A(t e ) Bu ( ) d t0 réponse libre + réponse forcée (produit de convolution) 6
- 7. Discrétisation x (t) = Ax (t) + Bu (t) ˙ y (t) = Cx (t) + Du (t) t x (t) = eA(t t0 ) x (t0 ) + eA(t ) Bu ( ) d t0 Convertisseurs AD kh+h t0 = kh x (kh + h) = eAh x (kh) + eA(kh+h ) Bu ( ) d t = kh + h kh t = kh y (kh) = Cx (kh) + Du (kh) Convertisseurs DA kh+h u( ) = u(kh) x (kh + h) = eAh x (kh) + eA(kh+h ) Bu( )d kh < kh + h ⌅ ⇤⇥ ⇧ kh u(kh) 7
- 8. Discrétisation kh+h x (kh + h) = eAh x (kh) + eA(kh+h ) Bu( )d ⌅ ⇤⇥ ⇧ kh u(kh) = kh + h ⇥ d = d⇥ ⇥ ⇧0 x (kh + h) = eAh x (kh) + ⇤ eA Bd ⌅ u (kh) h y (kh) = Cx (kh) + Du (kh) ⇤ h ⌅ ⌥ ⇥ x (k + 1) = eAh x (k) + ⇧ eA d ⌃ B u (k) ⌦ ↵ ⇥ 0 ⌦ ↵ y (k) = Cx (k) + Du (k) 8
- 9. Solution de l’équation d’état analogique, linéaire et stationnaire + Discrétisation x (t) = Ax (t) + Bu (t) ˙ y (t) = Cx (t) + Du (t) t x (t) = eA(t t0 ) x (t0 ) + eA(t ) Bu ( ) d t0 x (k + 1) = ⇤⇥ ⌅ x (k) + ⇥ ⇤⇥ ⌅ u (k) " # eAh Rh eA d B 0 y (k) = Cx (k) + Du (k) 9
- 10. Exponentielle de matrice: Série A2 2 Ai i = eAh = I + Ah + h + ... + h + ... 2! i! ⇤ h 2 i ⇥ A 2 A 3 A = A e d B = Ih + h + h + ... + hi+1 + . . . B 0 2! 3! (i + 1)! A A2 2 Ai =I + h+ h + ... + hi + . . . 2! 3! (i + 1)! = I + Ah⇥ = ⇥hB ⇥⇥⇥ ⇥ I + Ah = I+ Ah ... Ah I+ Ah 2 3 N 1 N 10
- 11. Discrétisation de systèmes stationnaires Modèle linéaire Modèle non linéaire x (t) = f [x (t) , u (t)] ˙ y (t) = g [x (t) , u (t)] Linéarisation Contre- Tangente réaction x (t) = Ax (t) + Bu (t) ˙ ˙ x (t) ˜ = A˜ (t) + B u (t) x ˜ y (t) = Cx (t) + Du (t) y (t) ˜ = C x (t) + D˜ (t) ˜ u h Discrétisation exacte =e Ah = eA d B 0 x (k + 1) = ⇥x (k) + u (k) x (k + 1) = ⇥˜ (k) + u (k) ˜ x ˜ y (k) = Cx (k) + Du (k) y (k) = C x (k) + D˜ (k) ˜ ˜ u 11
- 12. 4.1.8 Double intégrateur: Série 1 u(t) y(t) s2 y (t) = u(t) ¨ x1 (t) = y(t) x2 (t) = y(t) ˙ x1 (t) = y(t) = x2 (t) ˙ ˙ 0 1 0 x(t) = ˙ x(t) + u(t) x2 (t) = y (t) = u(t) ˙ ¨ 0 0 1 ⇥ ⇤ y(t) = x1 (t) y(t) = 1 0 x(t) + [0] u(t) 12
- 13. 4.1.8 Double intégrateur: Série A B ⇧ ⇤ ⌥ ⌃ ⌅ ⇧ ⌥⌅ ⇤ ⌃ 0 1 0 ⇥ x= ˙ x+ u et y= 1 0 x 0 0 1 ⌥ ⌃⇧ C A2 2 Ai i = eAh = I + Ah + h + ... + h + ... 2! i! ⇥ ⇥ ⇥ 2 ⇥ 1 0 0 1 0 0 h 1 h = + h+ = = eAh 0 1 0 0 0 0 2 0 1 ⌅ ⇧ ⇥ ⌃ ⌥ ⌦ ⌦ h ⇤ h 2 h ⇥ ⇤ h 1 0 |0 0 = eA d B= d = 2 0 0 1 1 h 1 0 0 0 |0 ⌅ 2 ⇧⇥ ⇤ ⌅ h2 ⇧ h h 0 = 2 = 2 0 h 1 h ⇤ ⌅ ⇧ 2 ⌃ h ⇥ 1 h x (k + 1) = x (k) + 2 u (k) et y (k) = 1 0 x (k) 0 1 h 13
- 14. Solution de l’équation d’état par la transformée de Laplace x(t) = Ax(t) + Bu(t) ˙ sX(s) x(0) = AX(s) + BU (s) (sI A)X(s) = x(0) + BU (s) 1 1 X(s) = (sI A) x(0) + (sI A) BU (s) Rt x(t) = eAt x(0) + 0 eA(t ⌧) Bu(⌧ )d⌧ h i At 1 1 e =L (sI A) 14
- 15. Algorithme de Leverrier (analogique) ⇥ 1 eAt = L 1 (sI A) et = eAh 1 adj (sI A) H0 sn 1 + H1 sn 2 + H2 sn 3 + . . . + Hn 1 (sI A) = = det (sI A) sn + a1 sn 1 + a2 sn 2 + . . . + an H0 = I a1 = tr (AH0 ) H1 = AH0 + a1 I a2 = 2 tr (AH1 ) 1 H2 = AH1 + a2 I . . . . . . an 1 = n 1 tr (AHn 2 ) 1 Hn 1 = AHn 2 + an 1I an = n tr (AHn 1 ) 1 Hn = AHn 1 + an I = 0 15
- 16. Double intégrateur: Leverrier A B ⇧ ⇤ ⌥ ⌃ ⌅ ⇧ ⌥⌅ ⇤ ⌃ 0 1 0 ⇥ x= ˙ x+ u et y= 1 0 x 0 0 1 ⌥ ⌃⇧ C ⇥ 1 e At =L 1 (sI A) et = eAh ⇥ ⇥ ⇥ 1 0 0 1 0 1 H0 = I = , a1 = tr (AH0 ) = tr = 0, H1 = AH0 + a1 I = 0 1 0 0 0 0 ⇥ ⇥ 1 1 0 0 0 0 a2 = tr (AH1 ) = tr = 0, H2 = AH1 + a2 I = (contrˆle) o 2 2 0 0 0 0 ⇥ ⇥ 1 0 0 1 s+ ⇥ H0 s + H1 1 0 1 0 0 1 s 1 (sI A) = 2 = = 2 s + a1 s + a2 s2 s 0 s ⌅ ⇧ ⇥ ⇤ ⇥ ⇤ 1/ 1 2 s s 1 t 1 h e =L At 1 = donc e Ah = 0 1/ 0 1 0 1 s 16
- 17. Théorème de Cayley-Hamilton Soit A une matrice n x n: f (A) = p (A) = 0 An 1 + 1 An 2 + ... + n 1I Les coefficients i sont solution de: f ( i) = p ( i) i = 1, . . . , n Les i sont les valeurs propres de A, soit les solutions de: det ( I A) = | I A| = 0 Pour des valeurs propres de multiplicité mi f (1) ( i ) = p(1) ( i ) . . . f (mi 1) ( i) = p(mi 1) ( i) 17
- 18. 4.1.12 Double intégrateur: Cayley-Hamilton A B ⇧ ⇤ ⌥ ⌃ ⌅ ⇧ ⌥⌅ ⇤ ⌃ 0 1 0 ⇥ x= ˙ x+ u et y= 1 0 x 0 0 1 ⌥ ⌃⇧ C e 1h = 0 ⇥1 + 1 f (A) = e Ah = 0A + 1I = 0 ⇥2 + 2h e 1 ⇥ ⇤ ⇥ ⇤ ⇥ ⇤ 0 0 1 1 | I A| = = = 2 = 0, = =0 0 0 0 0 1 2 e 1h = 0 ⇥1 + 1 1= 1 d d e 2h = ( 0 ⇥2 + 1) he 2h = 0 h= 0 d⇥2 d⇥2 ⇥ ⇥ ⇥ 0 1 1 0 1 h Ah e =h +1 = 0 0 0 1 0 1 18
- 19. 4.2 Solution de l’équation d’état discrète linéaire x (k + 1) = ⇥x (k) + u (k) y (k) = Cx (k) + Du (k) x(k0 + 1) = ⇥x(k0 ) + u(k0 ) x(k0 + 2) = ⇥x(k0 + 1) + u(k0 + 1) x(k0 + 2) = ⇥ [⇥x(k0 ) + u(k0 )] + u(k0 + 1) x(k0 + 2) = ⇥2 x(k0 ) + ⇥ u(k0 ) + u(k0 + 1) x(k0 + 3) = ⇥x(k0 + 2) + u(k0 + 2) ⇥ x(k0 + 3) = ⇥ ⇥ x(k0 ) + ⇥ u(k0 ) + u(k0 + 1) + u(k0 + 2) 2 x(k0 + 3) = ⇥3 x(k0 ) + ⇥2 u(k0 ) + ⇥ u(k0 + 1) + u(k0 + 2) k 1 x(k) = ⇥k k0 x(k0 ) + ⇥k i 1 u(i) i=k0 réponse libre + réponse forcée (produit de convolution) 19
- 20. Matrice de transfert discrète x (k + 1) = ⇥x (k) + u (k) CI nulles y (k) = Cx (k) + Du (k) zX(z) ⇥X(z) = U (z) Y (z) = CX(z) + DU (z) (zI ⇥)X(z) = U (z) Y (z) = CX(z) + DU (z) X(z) = (zI ⇥) 1 U (z) ⇥ Y (z) = C (zI ⇥) 1 U (z)⇥ + DU (z) Y (z) = C(zI ⇥) 1 + D U (z) ⇥ H(z)U (z) u(k) y(k) U (z) Y (z) Modèle d’état H(z) linéaire discret x(k) 20
- 21. Matrice de transfert discrète h i 1 H(z) = C(zI ) +D Y (z) = H(z)U (z) 2 3 2 32 3 Y1 (z) H11 (z) H12 (z) ··· H1r (z) U1 (z) 6 Y2 (z) 7 6 H21 (z) H22 (z) H2r (z) 76 U2 (z) 7 6 7 6 76 7 6 . . 7=6 . . .. . . 76 . . 7 4 . 5 4 . . . 54 . 5 Yp (z) Hp1 (z) Hp2 (z) ··· Hpr (z) Ur (z) 0 . . . . . Uj (z) Hij (z) . . . . . Yi (z) 0 . . 21
- 22. Algorithme de Leverrier (discret) 1 H (z) = C (zI ⇥) +D 1 adj (zI ) H0 z n 1 + H 1 z n 2 + H2 z n 3 + . . . + Hn 1 (zI ) = = det (zI ) z n + a1 z n 1 + a2 z n 2 + . . . + an H0 = I a1 = tr ( H0 ) H1 = H0 + a1 I a2 = 2 tr ( 1 H1 ) H2 = H1 + a2 I . . . . . . an 1 = n 1 tr ( Hn 2 ) 1 Hn 1 = Hn 2 + an 1I an = n tr ( Hn 1 ) 1 Hn = Hn 1 + an I = 0 22
- 23. 4.2.4 Double intégrateur: Matrice de transfert ⇥ 1 h = H (z) = C (zI ⇥) 1 +D 0 1 ⇥ 1 adj (zI ) Iz + H1 1 z 1 h (zI ) = = 2 = 2 det (zI ) z + a1 z + a2 z 2z + 1 0 z 1 a1 = tr ( ) = 2 ⇥ ⇤ ⇥ ⇤ ⇥ ⇤ 1 h 1 0 1 h H1 = + a1 I = 2 = 0 1 0 1 0 1 ⇥ ⇤ 1 0 a2 = 2 tr ( 1 H1 ) = 1 2 tr =1 0 1 ⇥ ⇤ ⇥ ⇤ ⇥ ⇤ 1 0 1 0 0 0 H2 = H1 + a2 I = + = cqfd 0 1 0 1 0 0 ⌅ ⇧⌅ ⇤ ⇧ ⇥ z 1 h h2 2 1 H (z) = 1 0 2 0 z 1 h (z 1) ⌅ ⇤ ⇧ ⇤ ⇥ h2 2 1 (z 1) h 2 + h2 2 h2 z + 1 H (z) = z 1 h 2 = = h (z 1) (z 2 1) 2 (z 1)2
- 24. Stabilité 1 H (z) = C (zI ⇥) +D Cadj(zI ⇥) H (z) H(z) = +D = det(zI ⇥) det(zI ⇥) ⇤ ⌅ H11 (z) ... H1r (z) ⇥ ⌥ . . Hij (z) H (z) = ⇧ . . . . ⌃ = [Hij (z)] = det (zI ) Hp1 (z) ··· Hpr (z) Pˆles zi des Hij solution de: det (zI o )=0 Valeurs propres vi de solution de: det ( I )=0 zi = vi Asymptotiquement stable si: |vi | < 1 pour i = 1, . . . , n 24
- 25. 4.1.13 Exemple: Entraînement discret ⇤ ⌅ ⇤ ⌅ u (k) u (t) x = ˙ 0 1 x+ 0 u y (t) y (k) x (k + 1) = ⇥x (k) + u (k) D 0 a b A A ⇥ D y (k) = Cx (k) y = 1 0 x " # " # 1 1 a eah 1 b 1 a eah 1 h ⇥=e Ah = = exemple: 4.1.13 0 e ah a eah 1 ⇤ ⇥ ⇥ ⌅ 1 Iz + H1 1 z eah 1 a eah 1 (zI ) = 2 = z + a1 z + a2 (z eah ) (z 1) 0 z 1 1 H (z) = C (zI ⇥) +D Inutile ! Les valeurs propres donnent la mˆme info e ⇤ ⇥ ⌅ ⇧ 1 1 a e ah 1 ⇥ 1 = z1 = 1 | I |= =( 1) ah e =0⇥ = z2 = eah 0 eah 2 25
- 26. Systèmes discrets linéaires et stationnaires Solution k 1 x (k + 1) = ⇥x (k) + u (k) x (k) = ⇥k k0 x (k0 ) + ⇥k l 1 u (l) ⌅ ⇤⇥ ⇧ y (k) = Cx (k) + Du (k) l=k0 R´ponse libre e ⌅ ⇤⇥ ⇧ R´ponse forc´e e e Matrice de transfert et stabilité ⇥ 1 Y (z) = C (zI ⇥) + D U (z) = H (z) U (z) ⇤ ⌅ H11 (z) ... H1r (z) ⇥ ⌥ . . Hij (z) H (z) = ⇧ . . . . ⌃ = [Hij (z)] = det (zI ) Hp1 (z) ··· Hpr (z) Pˆles zi des Hij solution de: det (zI o )=0 Valeurs propres vi de solution de: det ( I )=0 zi = vi Asymptotiquement stable si: |vi | < 1 pour i = 1, . . . , n 26