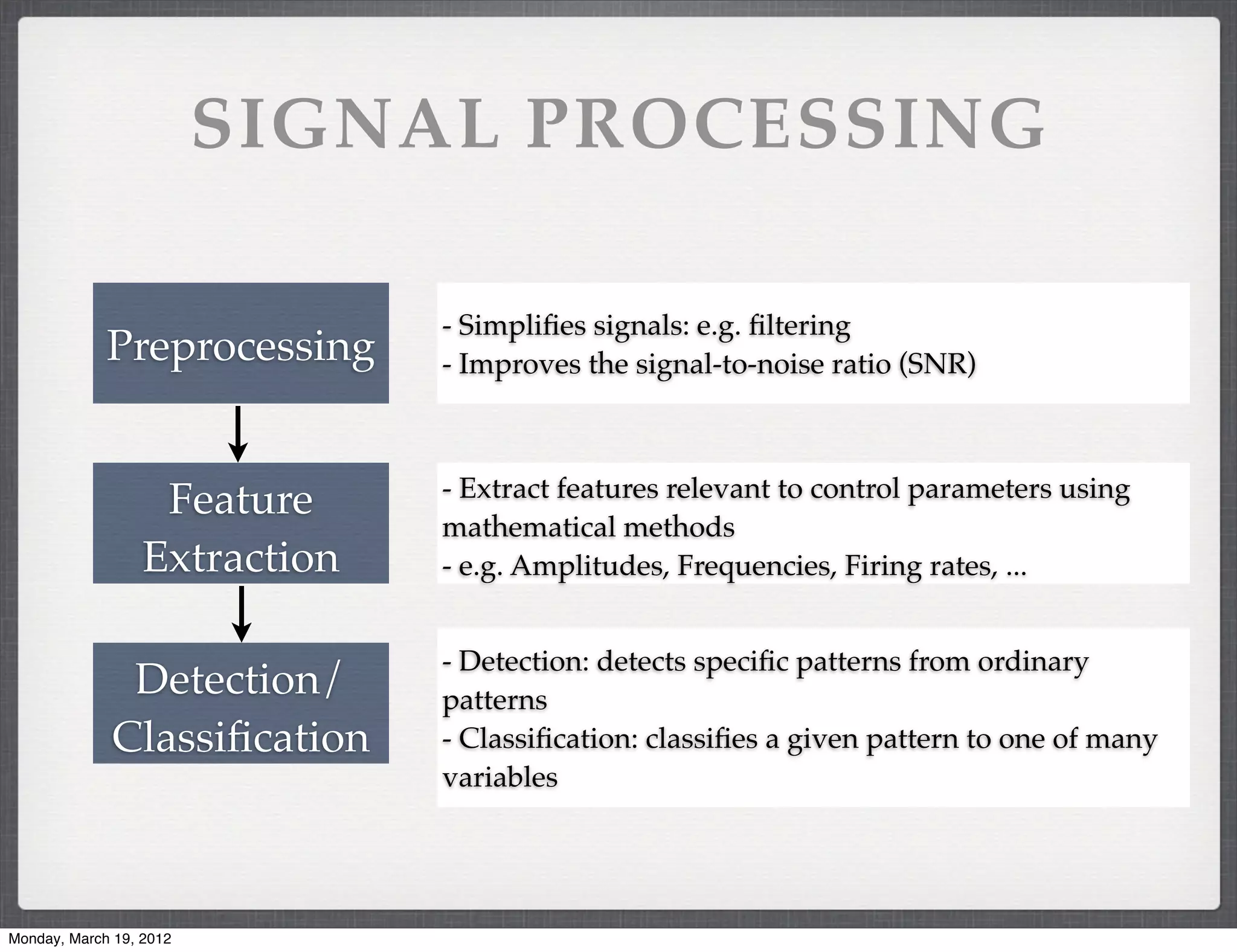
This document discusses how a brain-computer interface (BCI) works. It explains that a BCI detects sensorimotor rhythms in the mu and beta frequency bands in the sensorimotor cortex using EEG or ECoG. It describes how motor imagery causes event-related desynchronization and synchronization of these rhythms. A BCI also requires training users to generate distinguishable brain patterns through motor imagery without external stimuli. Signal processing techniques are used to extract relevant features and classify patterns for device control.

![It is system based on a conventional wheelchair equipped with a stereo camera sys-
tem, a robot arm with 7 degrees-of-freedom, a gripper with force/torque sensor, a
smart tray with tactile surface and weight sensors, and a computing unit consist-
ing of three independent industrial PCs. FRIEND II can perform certain operations
Rolland III FRIEND II
Fig. 8 Semi-autonomous assistive devices developed at the University of Bremen that include
high level control: Intelligent wheelchair Rolland III, and rehabilitation robot FRIEND II (modified
from [35])
Monday, March 19, 2012](https://image.slidesharecdn.com/bri503lecture05-120524193035-phpapp02/75/Bri503-lecture05-17-2048.jpg)