Downloaded 15 times






![Brahms Model compilation-unit ::= [ PCK. package-declaration ]* [ IMP. import-declaration ]* [ GRP. group | AGT. agent | CLS. class | OBJ. object | COC. conceptual-class | COB. conceptual-object | ADF. areadef | ARE. area | PAT. path ]* A Brahms model consists of an number of compilation units Each compilation unit is usually put in a separate .b file](https://image.slidesharecdn.com/brahmsintro-090929172117-phpapp02/85/Brahms-Agent-Based-Modeling-Simulation-Course-1-18-320.jpg)


![Brahms Compiler (bc) [~/Applications/AgentEnvironment/bin] sierhuis% ./bc NASA Ames Research Center Brahms Compiler Version 2.21.8 Copyright (c) 1997-2008 NASA Ames Research Center. All Rights Reserved. Usage: bc [options] <brahms file> Options: -lp <library-path> set library path -source <source-path> set the source code path -d <destination-path> set the path where to write the compiled code to. -bar <archive file> the archive file in which to store the files with the compiled code. -dtd <dtd path> set the path where DTD files can be found -uml generate XMI-based UML for the model -cp set the Java class path to find Java activities -? displays usage text Brahms file: .b file to be compiled](https://image.slidesharecdn.com/brahmsintro-090929172117-phpapp02/85/Brahms-Agent-Based-Modeling-Simulation-Course-1-21-320.jpg)


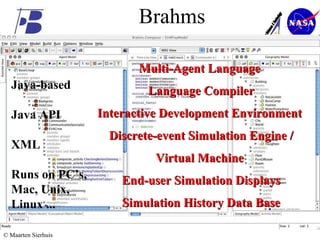
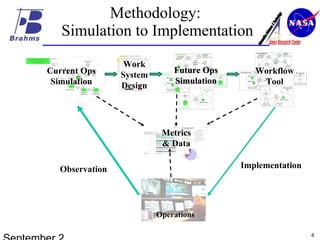
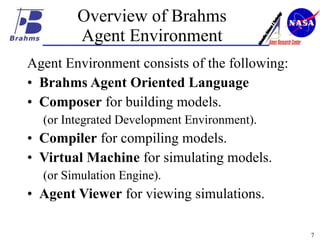
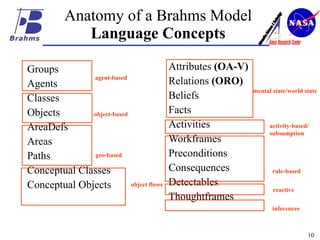
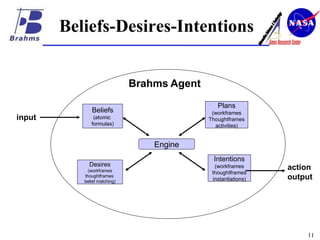
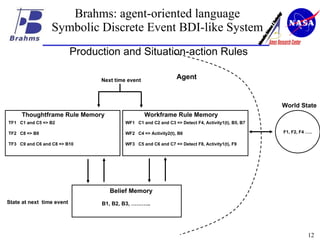
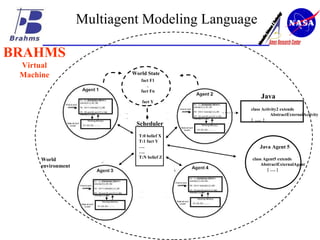
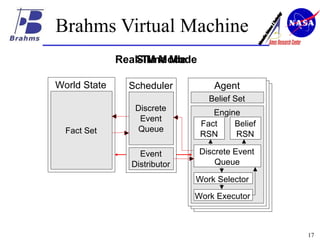
The document provides an overview of Brahms, a multi-agent modeling and simulation environment focused on understanding human collaborative work. It details the structure and components of a Brahms model, including agent-oriented language, simulation engine, and model compilation units. Additionally, it discusses the practical applications of Brahms in operational simulations, highlighting its capabilities in modeling social and cognitive processes.















































