Download to read offline


![Baltic Olympiad on Automatic Control, 03-05 June, 2002 - St. Petersburg, Russia
4. FUZZY-PETRI NET REASONING COMPONENTS
4. FUZZY-PETRI NET REASONING COMPONENTS
RS: IF X1S IS A1S AND ... AND XMsS IS AMsS THEN XMs+1S IS B1S AND ...AND XMs+NsS IS BNsS (τΣ)
RT: IF X1T IS A1T AND...AND XMTT IS AMTT THEN XMT+1T IS B1T AND...AND XMT+NTT IS BNTT (τT)
(16)
which are linked by :
XMs+1S = X1T
(17)
P= { prmr | mr = 1, ... ,Mr+Nr, r=S,T }
(18)
PR=prrmr = { "Xrmr IS Armr", mr<= Mr; "Xrmr IS Brmr-Mr", mr>Mr}
(19)
TR= { tS, tT}
TC = { t3 }
p 1S
pMsS
tS
pMs+1S
pMs+NsS
(20)
(21)
t3
p1T
tT
pMtT
pMt+1T
pMt+NtT
bS1,i = τS(g(pMs+1 s) Λ bS1,i), i=1,...,I
(22)
g(p1T) = V [ τS(g(pMs+1 s) Λ bS1,i) Λ aT1,i ]
(23)
g(p1T) = τS(g(pMs+1 s)) Λ V [τS(bS1,i) Λ aT1,i ]
(24)](https://image.slidesharecdn.com/boac-131222034207-phpapp01/85/BOAC-Intelligent-reasoning-9-320.jpg)
![Baltic Olympiad on Automatic Control, 03-05 June, 2002 - St. Petersburg, Russia
5. REASONING ALGORITHM
5. REASONING ALGORITHM
Step 1
Initial marking function will be:
M(pi) = { 0, if pi ∉ IP; 1, if pi ∈ IP }
Step 2
(25)
We fire the active transitions and calculate DOF-s.
∃ tj∈ T | ∀ pk ∈ I(tj), M(pk)=1
(26)
If tj ∈ TR, g(pi) = Λ g(pk) , ∀pi∈ O(tj), pk∈ I(tj)
If tj ∈ TC, g(pi) = V [τrk( g(pk)) Λ µpk,pi] , ∀pi ∈ O(tj), pk ∈ I(tj)
Step 3:
(27)
(28)
Go back to step 2, while:
∃ tj∈ T | M(pi) = 1, ∀ pi ∈ I(tj)
Step 4:
(29)
For each output variable X, its associated possibility distribution B={bi}, i=1,...,I, is:
bi= V τr(g(pnr)) Λ τr(brn,i), pnr∈ Px
(30)
Px = { pnr ∈ P | α(pnr) = "X IS Bnr”}
(31)](https://image.slidesharecdn.com/boac-131222034207-phpapp01/85/BOAC-Intelligent-reasoning-10-320.jpg)

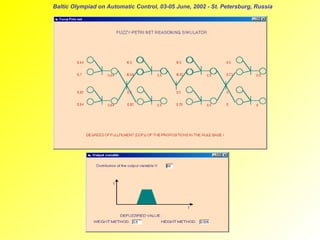
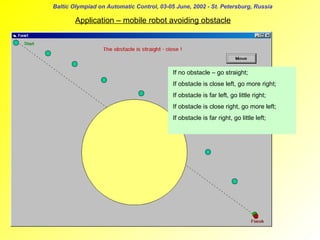

The document describes a fuzzy-Petri net reasoning simulator called FUPERS. FUPERS uses a Petri net model to represent fuzzy production rule systems for expert decision making and control. It allows modeling of parallel and concurrent processes in fuzzy rule-based systems. FUPERS implements an algorithm for data-driven execution of the fuzzy knowledge base using compositional rule inference. It was developed to overcome limitations of computational demands for real-time applications like controlling a mobile robot to avoid obstacles.



































































