INTRODUCTION
Floor cleaning isa very tough job it requires lot of patience and lot of persons to
clean and in cleaning a person may damage his/her healthiness, cleaning is more
time taking work.
To do work easily we have developed the robot and it is designed in such a way
that it can clean house, offices, apartments, and even streets as well.
The Bluetooth controlled floor cleaning robot which cleans a dirty floor
automatically using a set of commands given to the robot by a smartphone.
4.
The device communicatesthrough Bluetooth technology via a HC05 Bluetooth
module that will be used to exchange commands to the microcontroller – Arduino
NANO
The Bluetooth-controlled floor cleaning robot offers convenience and flexibility
to users by allowing them to remotely control the robot's movements and cleaning
actions from a distance.
LITERATURE SURVEY
“A smartautonomous floor
cleaner with an Android
based controller” by Anshu
Prakash Murdan, Pawan
Kumar Ramkissoon
This paper proposes a cheaper alternative to
expensive commercial robots by creating a robot
that can both vacuum and mop, and is
controllable through an app.
The robot uses Arduino Mega microcontroller, a
mobile app with Bluetooth connectivity, and has
autonomous and remote-controlled modes.
The system is built with rechargeable battery.
7.
“Automatic Floor Cleaning
RobotUsing Arduino and
Ultrasonic Sensor” by Yuda
Irawan
This paper proposes a design for an automatic
floor cleaning robot prototype It utilizes an
Arduino Uno microcontroller as the brain and
an ultrasonic sensor to detect obstacles within
15 cm.
When the sensor detects an obstacle, the robot
automatically changes direction to avoid it.
8.
“Survey on Automaticand
manual floor cleaning robot”
by Meghana K V, Harshitha V,
Mahima Padmanabha B,
Nagesh N Dikshit, B R
Santosh Kumar
This project proposes a user-friendly robotic
vacuum cleaner with additional features.
The robot will be fully automatic and include a self-
emptying dustbin and a pick-and-place mechanism.
The design is intended to be simple to build,
operate, and improve people's lives.
WORKING PRINCIPLE
The usersends cleaning instructions through a smartphone app connected to the
robot via Bluetooth
The robot uses sensors to navigate around the room. Here distance sensors are
used .
The robot is equipped with wheels powered by electric motors that propel it
around. The user’s commands through app direct the motor movements and
dictating the robot’s cleaning path.
12.
An android applicationis used either to control the floor cleaner or to put it
in autonomous mode.
The robot uses microfiber cloths for mopping or wiping the floor.
Water tanks and pumps are included in the robot.
The water tank stores the clean water used for mopping the floor.
The pump precisely controls the water flow from the tank to the mopping cloth.
The whole robotic system is powered by lithium ion battery.
13.
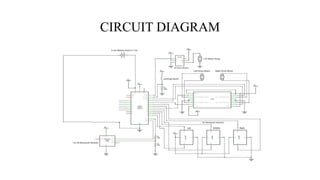
COMPONENTS
ARDUINO NANO
• Compactand Breadboard-Friendly
• Similar to Uno, But Miniaturized
• Multiple Power Options
BLUETOOTH MODULE
• Enable wireless communication
• Low Power Consumption
• Easy Integration
14.
ULTRASONIC SENSOR
• Workbased on the principle of echolocations.
• Works in Various Lighting Conditions.
• less expensive compared to some other sensors.
L298N MOTOR DRIVER
• It controls two DC motors simultaneously,
• Simple Operation
• Cost-Effective and Popular
15.
LITHIUM ION BATTERY
•Lithium Ion (Li-ion) batteries are popular for their high energy density.
• Unlike disposable batteries, Li-ion batteries can be recharged hundreds of
times.
• Li-ion batteries have a longer lifespan.
DC MOTOR
• Consisting of a rotating shaft and electromagnets.
• The speed and direction of a DC motor can be easily controlled by adjusting
the supplied voltage or current.
16.
MINI SUBMERSIBLE WATERPUMP
• Small size allow them to fit in tight spaces and be submerged entirely in
liquids.
• Often powered by low voltage DC.
• Easy to use.
• Mini submersible water pumps are generally affordable.
17.
RESULTS
The project demonstratesit's possible to build such a robot using Arduino and
Bluetooth for app-based control of the cleaning action.
The robot can be programmed for functionalities like moving forward/backward,
turning, and potentially even obstacle avoidance.
The robot could have a detachable mopping attachment that holds the microfiber
cloth. This would allow for easy removal and washing of the cloth.
A drip irrigation system allows for much finer control of water flow from the pump.
19.
ADVANTAGES
It is convenientto use.
It can be focused on specific areas.
Saves time by cleaning on its own.
Cleans under furniture and other tricky areas, reaching where you might struggle.
Control your robot from phone, like a remote control.
20.
DISADVANTAGES
• Arduino-based robotsmay have limited capabilities compared to commercial
alternatives, lacking advanced features such as mapping technology or room
detection.
• Building and programming a floor cleaning robot with Arduino may be
challenging for those without prior experience in electronics or programming.
• DIY robots may be more prone to malfunctions
• Users may have limited access to technical support or troubleshooting resources
compared to commercial robot manufacturers, making it more difficult to resolve
issues.
21.
APPLICATION
Automate the processmopping floors in homes, reducing the manual effort
required for routine cleaning tasks.
Clean large areas such as offices, malls, and restaurants efficiently and
systematically, ensuring a consistently clean environment for customers and
employees.
Ensure sanitized floors in medical settings, reducing the risk of infections and
maintaining a sterile environment for patients and healthcare workers.
22.
Keep school anduniversity floors clean, promoting a conducive
learning environment for students and faculty members.
Assist caregivers in maintaining clean floors in nursing homes and
assisted living facilities, providing a safe and comfortable living
environment for residents.
23.
FUTURE SCOPE
Future iterationscould incorporate advanced navigation technologies such as
SLAM (Simultaneous Localization and Mapping) for improved mapping and
navigation capabilities.
Integration of machine learning algorithms could enhance the robot's ability to
learn and adapt to its environment, optimizing cleaning patterns and efficiency
over time.
Future models may feature seamless integration with smart home systems,
allowing for voice commands, integration with virtual assistants, and
interoperability with other smart devices.
24.
Incorporating advanced sensors,such as lidar or depth cameras, could
improve obstacle detection, navigation accuracy, and surface
recognition capabilities.
Future robots may be designed to clean a variety of surfaces,
including carpets, hardwood floors, and tiles, with interchangeable
cleaning attachments optimized for each surface type.
25.
CONCLUSION
The Arduino-powered robotoffers convenient automated floor cleaning, freeing
users from the chore of manual cleaning.
Building a floor cleaning robot with Arduino components can be cost-effective
compared to purchasing commercial alternatives, making it accessible to a wider
range of users.
While not as advanced as some commercial models, the Arduino-powered robot
still offers efficient floor cleaning, saving time and effort for users.


![REFERENCES
• [1] Anshu Prakash Murdan, Pawan Kumar Ramkissoon, “A smart autonomous
floor cleaner with an Android based controller” Electrical and Electronics
Engineering Dept University of Mauritius 978-l-7281-5707-8/20 ©2020 IEEE
• [2] Meghana K V, Harshitha V, Mahima Padmanabha B, Nagesh N Dikshit, B R
Santosh Kumar Electronics and Communication Engineering, K.S. Institute of
Technology, Bangalore, India “Survey on Automatic and manual floor cleaning
robot” 2019 JETIR April 2019, Volume 6, Issue 4.](https://image.slidesharecdn.com/bluetoothcontrolledfloorcleaningrobotusingarduinofinal-250311133029-6cfb1e87/85/BLUETOOTH-CONTROLLED-FLOOR-CLEANING-ROBOT-USING-ARDUINO-FINAL-pptx-26-320.jpg)
![• [3] Pawan Kumar Ramkisssoon , “A Smart Autonomous Floor Cleaner With An
Android Based Controller”, IEEE, 2020.
• [4] Rizuwana Parween, “Autonomous Self-reconfigurable Floor Cleaning Robot”,
IEEE, 2020.
• [5] Yuda Irawan, “Automatic Floor Cleaning Robot Using Arduino And Ultrasonic
Sensor” , Journal Of Robotics And Control ( JRC) , 2021.](https://image.slidesharecdn.com/bluetoothcontrolledfloorcleaningrobotusingarduinofinal-250311133029-6cfb1e87/85/BLUETOOTH-CONTROLLED-FLOOR-CLEANING-ROBOT-USING-ARDUINO-FINAL-pptx-27-320.jpg)