Downloaded 34 times
![Paradigm Shift...
Traditional Approach
• Push Recovery is a
hardware problem.
• Human Gait can only be
modeled using complex
constraint equations of two
link or three link planar
models
• System Modeling can be
tested for correctness until
it is implemented.
12/24/2013
Our Approach
• It can be ported to the
software domain.
• It can be solved using
Machine Learning
Techniques if we have
enough data.
• Rigorous System Design
incorporates the notion of
“Correctness by
Construction” [BIP]](https://image.slidesharecdn.com/bipedlocomotion-131225010438-phpapp01/85/Biped-locomotion-14-320.jpg)
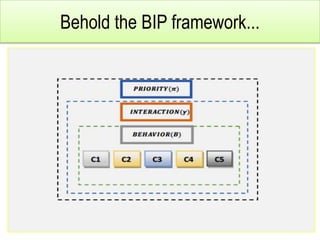
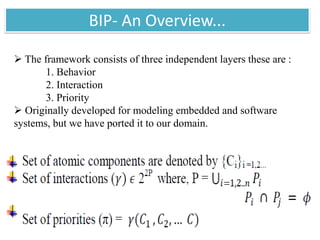
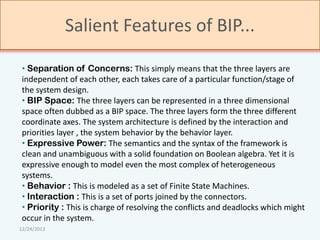
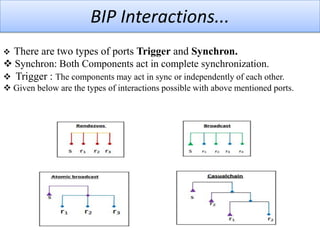
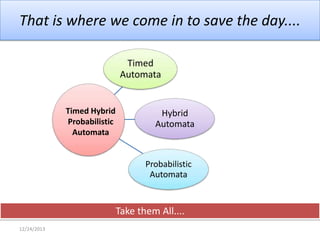
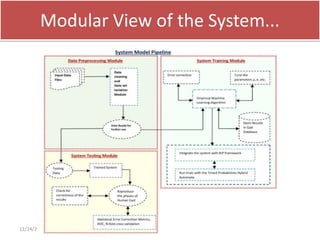
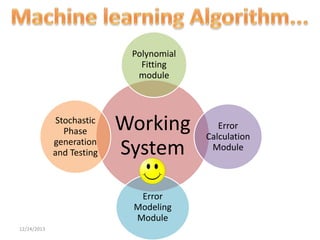
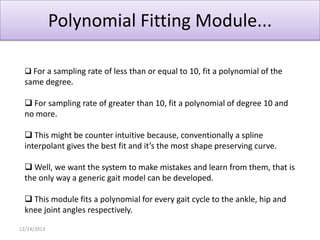
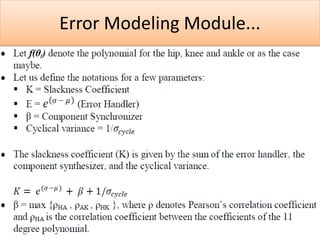
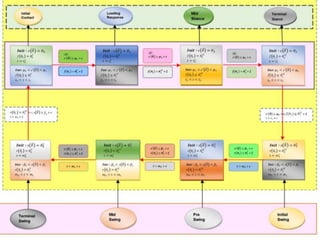


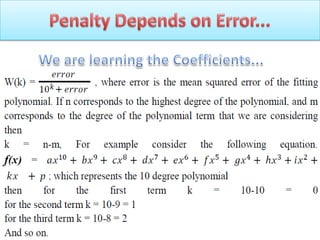
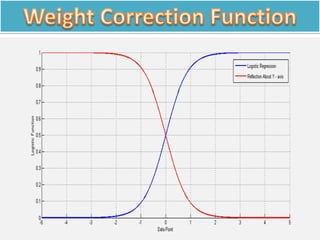
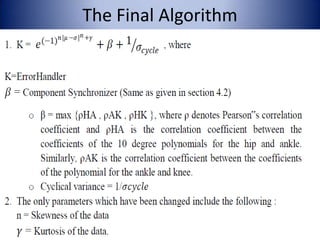
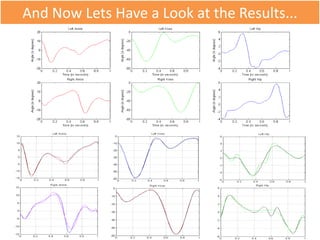
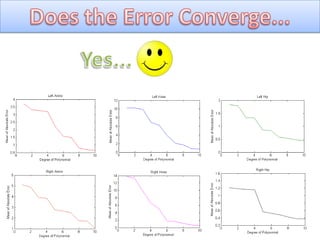
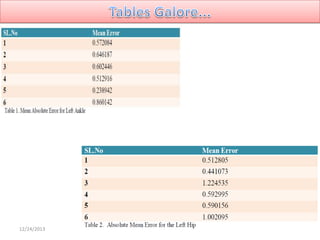
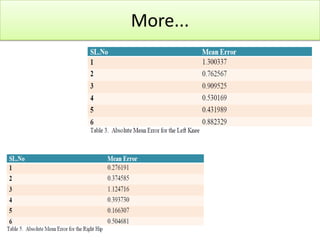
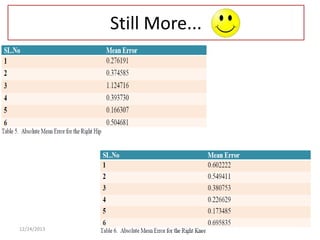
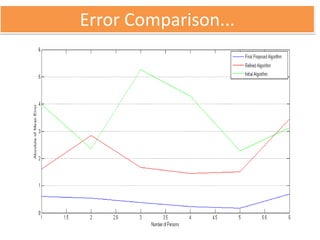
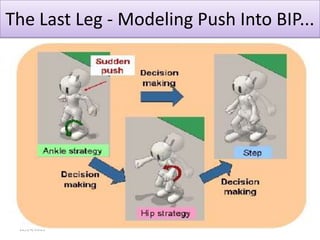
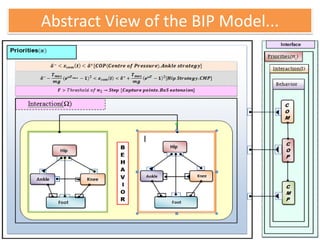

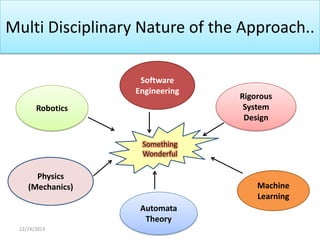
The document discusses modeling human gait and push recovery for bipedal robots using machine learning and formal methods. It proposes using a combination of timed hybrid probabilistic automata within the BIP framework. Key aspects include fitting motion data with polynomials, generating stochastic phases that account for errors, and refining the machine learning algorithm. Push recovery is modeled in BIP with left and right leg composites interacting through the COM, COP and CMP interfaces. Future work proposed includes using Petri nets and formal verification, cellular automata models from computer vision data, and optimization techniques for regression analysis.