2018年3月1日開催:Azure Webinar「Microsoft Bot Framework ではじめるチャットボット開発」資料 https://info.microsoft.com/JA-PowerBI-WBNR-FY18-03Mar-01-BotFramework-MCW0002739_01Registration-ForminBody.html





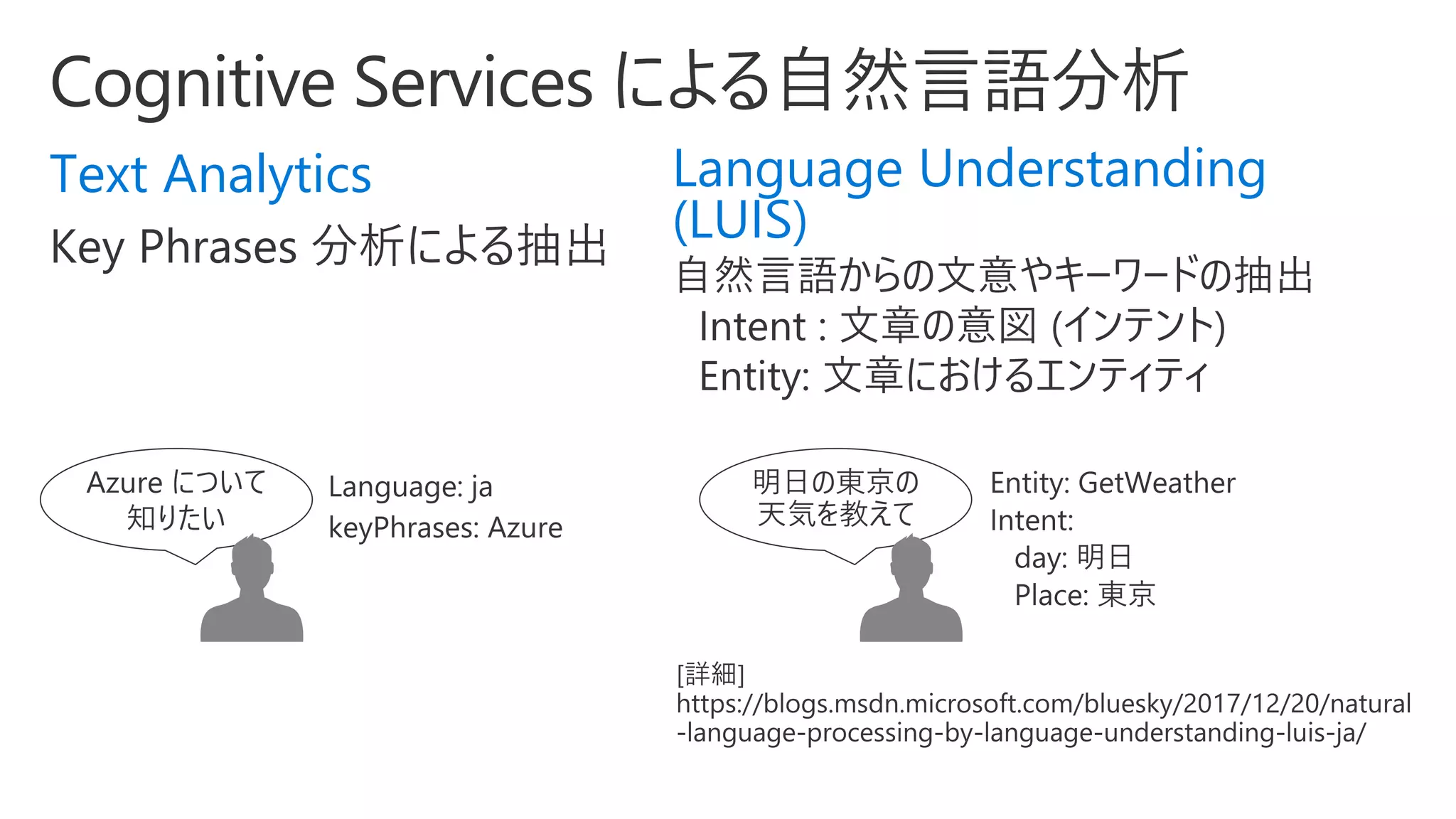











![Azure Webinar - Cognitive Services 概要[Demo編]_20180123](https://cdn.slidesharecdn.com/ss_thumbnails/azurewebinarcognitiveservicesoverviewl100demo20180123-180123111758-thumbnail.jpg?width=640&height=640&fit=bounds)





















![[JAZUG 7周年総会]社内でIoT&AIな農業系チャットボット開発講座をやってみて](https://cdn.slidesharecdn.com/ss_thumbnails/jazug7iotai-170909021627-thumbnail.jpg?width=640&height=640&fit=bounds)

![[TL08] 50 分で Bot 開発者になれる!~実践的ノウハウと、 Azure や Office 365 を組み合わせたアーキテクチャの伝授~](https://cdn.slidesharecdn.com/ss_thumbnails/tl08-170614050647-thumbnail.jpg?width=640&height=640&fit=bounds)

























